感谢FAST-LIO2代码解析(一) - 古月居,代码的注释内容主要参考古月居同志,特此声明,如有异议,欢迎反馈!
一、数据的处理
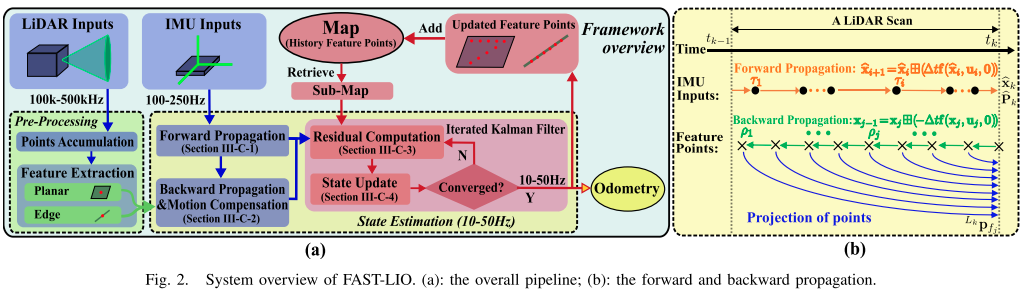
- 对于FAST-LIO2代码来说,主要的数据是通过preprocess与IMU_Processing拿到相应的传感器数据,并在主程序当中调用ESF与IKD-Tree完成优化。
1.1 激光雷达部分
(1) preprocess.h
- 首先在最上面先定义了一系列enum的信息,通过enum选择不同的激光雷达类型,特征点特征等,并通过orgtype存放一些激光雷达点的一些其他属性。
//1、枚举类型:表示支持的雷达类型;
enum LID_TYPE{AVIA = 1, VELO16, OUST64}; //{1, 2, 3}
//2、枚举类型:表示时间的类型;
enum TIME_UNIT{SEC = 0, MS = 1, US = 2, NS = 3};
//3、枚举类型:表示特征点的类型;
enum Feature{Nor, Poss_Plane, Real_Plane, Edge_Jump, Edge_Plane, Wire, ZeroPoint};
//4、枚举类型:位置标识
enum Surround{Prev, Next};
//5、枚举类型:表示有跨越边的类型
enum E_jump{Nr_nor, Nr_zero, Nr_180, Nr_inf, Nr_blind};
//orgtype类:用于存储激光雷达点的一些其他属性;
struct orgtype
{
double range; //点云在xy平面离雷达中心的距离;
double dista; //当前点与后一个点之间的距离;假设雷达原点为O 前一个点为M,当前点为A,后一个点为N.
double angle[2]; //这个是角OAM和角OAN的cos值;
double intersect; //这个是角MAN的cos值;
E_jump edj[2]; //前后两点的类型;
Feature ftype; //点类型;
// 构造函数;
orgtype()
{
range = 0;
edj[Prev] = Nr_nor;
edj[Next] = Nr_nor;
ftype = Nor; //默认为正常点;
intersect = 2;
}
};
- 其中 LID_TYPE 这些与下面的数据结构有关系。通过enum选择不同的激光雷达数据,来设置不同的数据结构。
//velodyne数据结构-namespace velodyne_ros;
namespace velodyne_ros {
struct EIGEN_ALIGN16 Point {
PCL_ADD_POINT4D; //4D点坐标类型;
float intensity; //强度;
float time; //时间;
uint16_t ring; //点所属的圈数;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW //进行内存对齐;
};
}
//注册velodyne_ros的Point类型;
POINT_CLOUD_REGISTER_POINT_STRUCT(velodyne_ros::Point,
(float, x, x)
(float, y, y)
(float, z, z)
(float, intensity, intensity)
(float, time, time)
(uint16_t, ring, ring)
)
//ouster数据结构-namespace ouster_ros;
namespace ouster_ros {
struct EIGEN_ALIGN16 Point {
PCL_ADD_POINT4D; //4D点坐标类型;
float intensity; //强度;
uint32_t t; //时间;
uint16_t reflectivity; //反射率;
uint8_t ring; //点所属的圈数;
uint16_t ambient; //没用到;
uint32_t range; //距离;
EIGEN_MAKE_ALIGNED_OPERATOR_NEW //进行内存对齐;
};
}
//注册ouster的Point类型;
POINT_CLOUD_REGISTER_POINT_STRUCT(ouster_ros::Point,
(float, x, x)
(float, y, y)
(float, z, z)
(float, intensity, intensity)
// use std::uint32_t to avoid conflicting with pcl::uint32_t
(std::uint32_t, t, t)
(std::uint16_t, reflectivity, reflectivity)
(std::uint8_t, ring, ring)
(std::uint16_t, ambient, ambient)
(std::uint32_t, range, range)
)
- 下面的这些是Preprocess的主体函数,主要作用是用于对激光雷达点云数据进行预处理。
class Preprocess
{
public:
// EIGEN_MAKE_ALIGNED_OPERATOR_NEW
Preprocess(); //构造函数;
~Preprocess(); //析构函数;
//对Livox自定义Msg格式的激光雷达数据进行处理;
void process(const livox_ros_driver2::CustomMsg::ConstPtr &msg, PointCloudXYZI::Ptr &pcl_out);
//对ros的Msg格式的激光雷达数据进行处理;
void process(const sensor_msgs::PointCloud2::ConstPtr &msg, PointCloudXYZI::Ptr &pcl_out);
void set(bool feat_en, int lid_type, double bld, int pfilt_num);
//全部点、边缘点、平面点; sensor_msgs::PointCloud2::ConstPtr pointcloud;
PointCloudXYZI pl_full, pl_corn, pl_surf;
PointCloudXYZI pl_buff[128]; //maximum 128 line lidar
vector<orgtype> typess[128]; //maximum 128 line lidar
float time_unit_scale;
//雷达类型、采样间隔、扫描线数、扫描频率;
int lidar_type, point_filter_num, N_SCANS, SCAN_RATE, time_unit;
//最小距离阈值(盲区);
double blind;
//是否提取特征、是否进行时间偏移;
bool feature_enabled, given_offset_time;
//发布全部点、发布平面点、发布边缘点;
ros::Publisher pub_full, pub_surf, pub_corn;
private:
//用于对Livox激光雷达数据进行处理;
void avia_handler(const livox_ros_driver2::CustomMsg::ConstPtr &msg);
//用于对ouster激光雷达数据进行处理;
void oust64_handler(const sensor_msgs::PointCloud2::ConstPtr &msg);
//用于对velodyne激光雷达数据进行处理l;
void velodyne_handler(const sensor_msgs::PointCloud2::ConstPtr &msg);
void give_feature(PointCloudXYZI &pl, vector<orgtype> &types);
void pub_func(PointCloudXYZI &pl, const ros::Time &ct);
int plane_judge(const PointCloudXYZI &pl, vector<orgtype> &types, uint i, uint &i_nex, Eigen::Vector3d &curr_direct);
bool small_plane(const PointCloudXYZI &pl, vector<orgtype> &types, uint i_cur, uint &i_nex, Eigen::Vector3d &curr_direct);
bool edge_jump_judge(const PointCloudXYZI &pl, vector<orgtype> &types, uint i, Surround nor_dir);
int group_size;
double disA, disB, inf_bound;
double limit_maxmid, limit_midmin, limit_maxmin;
double p2l_ratio;
double jump_up_limit, jump_down_limit;
double cos160;
double edgea, edgeb;
double smallp_intersect, smallp_ratio;
double vx, vy, vz;
};(2) preprocess.cpp
- 上面是头文件,详细的代码在preprocess.cpp中,这里我们来详细介绍每一个函数,首先是构造函数和析构函数,里面主要存放一些雷达的参数
Preprocess::Preprocess()
:feature_enabled(0), lidar_type(AVIA), blind(0.01), point_filter_num(1)
{
inf_bound = 10; //有效点集合,大于10m则是盲区;
N_SCANS = 6; //多线激光雷达的线数;
SCAN_RATE = 10; //平面斜率?
group_size = 8; //8个点为一组;
disA = 0.01; //点集合的距离阈值,判断是否为平面;
disA = 0.1; //点集合的距离阈值,判断是否为平面;
p2l_ratio = 225; //点到线的距离阈值,需要大于这个值才能判断组成面;
limit_maxmid =6.25; //中点到左侧的距离变化率范围;
limit_midmin =6.25; //中点到右侧的距离变化率范围;
limit_maxmin = 3.24; //左侧到右侧的距离变化率范围;
jump_up_limit = 170.0;
jump_down_limit = 8.0;
cos160 = 160.0;
edgea = 2; //点与点距离超过两倍则认为遮挡;
edgeb = 0.1; //点与点距离超过0.1m则认为遮挡
smallp_intersect = 172.5;
smallp_ratio = 1.2; //三个点如果角度大于172.5度,且比例小于1.2倍,则认为是平面
given_offset_time = false;//是否提供时间偏移;
jump_up_limit = cos(jump_up_limit/180*M_PI); //角度大于170度的点跳过;
jump_down_limit = cos(jump_down_limit/180*M_PI); //角度小于8度的点跳过;
cos160 = cos(cos160/180*M_PI); //夹角限制;
smallp_intersect = cos(smallp_intersect/180*M_PI);//三个点如果角度大于172.5度,且比例小于1.2倍,则认为是平面;
}



![.[support2022@cock.<span style='color:red;'>li</span>].<span style='color:red;'>faust</span>勒索病毒数据怎么处理|数据<span style='color:red;'>解密</span>恢复](https://img-blog.csdnimg.cn/direct/80cd625bad694c27a0e5b33937e5db71.png)