引言
这是李宏毅老师深度强化学习视频的学习笔记,主要介绍策略梯度的概念,在上篇文章的末尾从交叉熵开始引入策略梯度。
如何控制你的智能体
上篇文章末尾我们提到了两个问题:
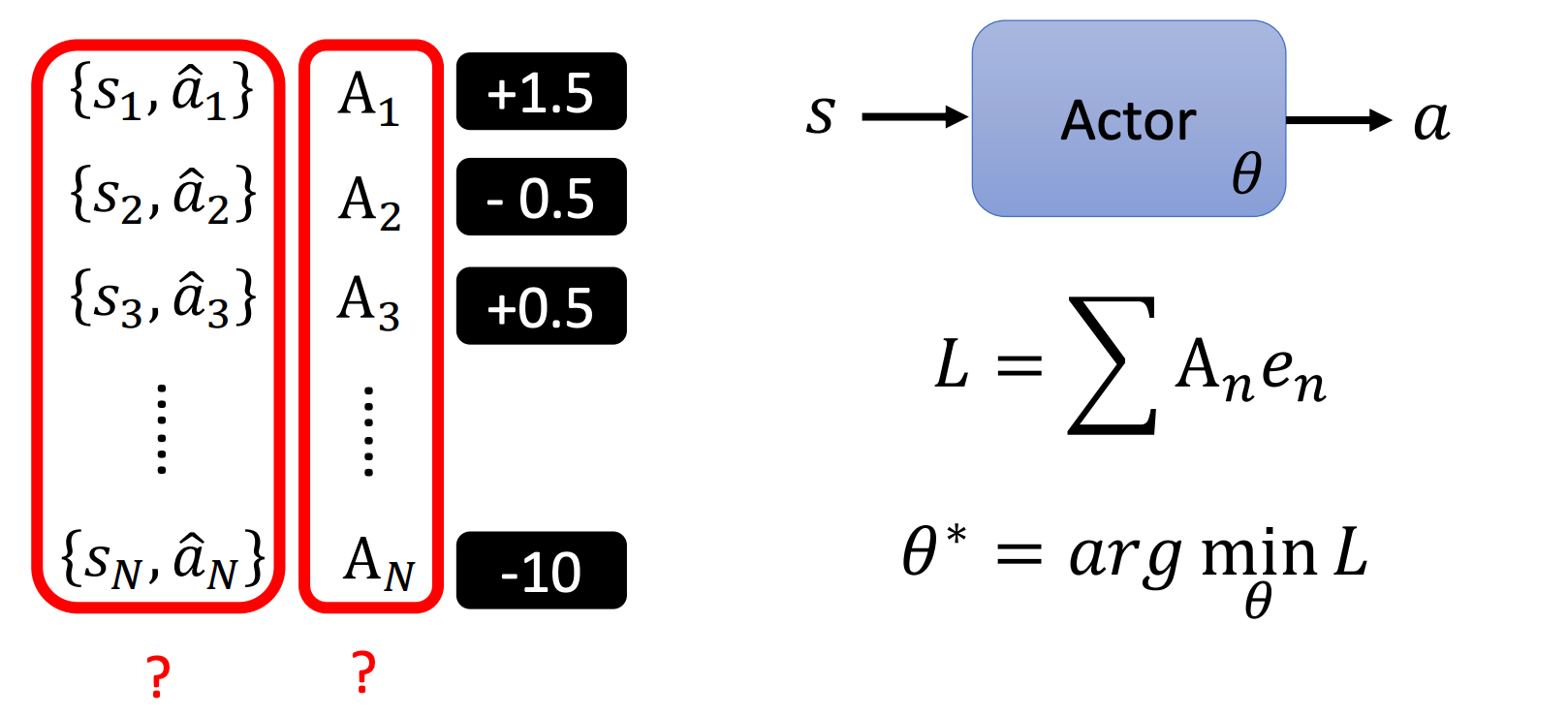
- 如何定义这些分数 A A A,即定义奖励机制;
- 如何采样这些状态和动作对;
版本0
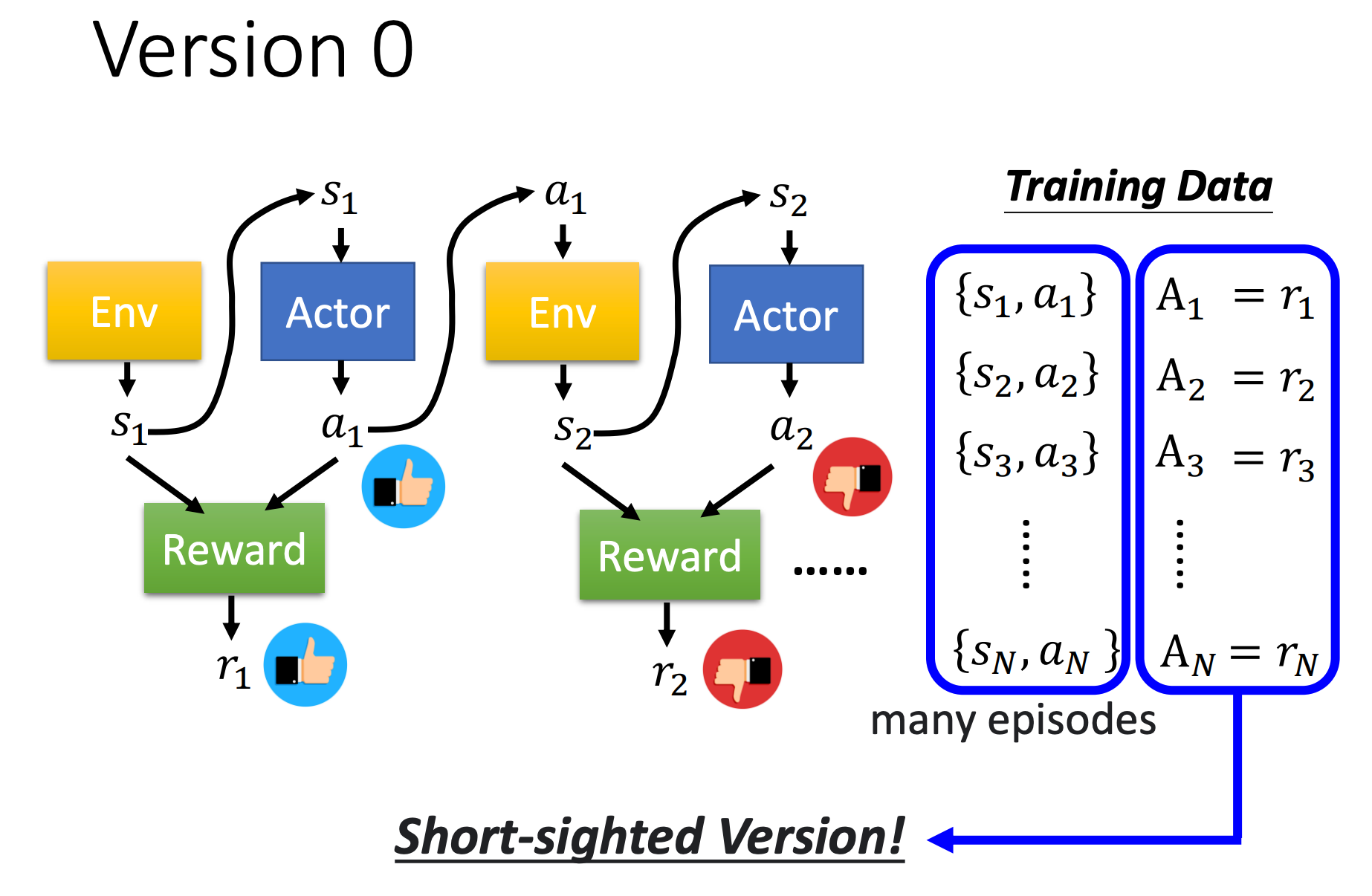
我们先来看一个最简单,但不正确的版本。
首先要收集状态-动作对,其实很简单,需要先有一个智能体,这个智能体很傻也没关系,让它去和环境互动,记录互动过程中看到的状态和产生的动作,就可以收集这些状态-动作对。通常我们做多个episode,就可以收集到很多数据,如上图蓝框所示。
这里说这个智能体很傻也没关系,指的是刚开始我们可以随机初始化这个智能体(神经网络)。
收集到这些数据后,我们就可以评价每个动作的好坏,评价就是看智能体在某个状态下执行的动作所得到的分数有多少,这个分数(就是奖励)可正可负可零,正的越多表示这个动作越好,负的越多表示这个动作越不好。
这样我们可以把分数 A A A和奖励 R R R关联起来: A i = r i A_i=r_i Ai=ri。
如果智能体在看到 s 1 s_1 s1执行动作 a 1 a_1 a1后得到的奖励 r 1 r_1 r1是正的,就代表这是一个好的动作,以后尽可能执行这个动作。
如果智能体在看到 s 2 s_2 s2后执行动作 a 2 a_2 a2得到的奖励 r 2 r_2 r2是负的,就代表是一个坏的动作,以后不要执行这个动作。
⚠️ 这里说尽可能是为了增加随机性(探索性),可能执行 a 1 a_1 a1虽然好,但不是最好的;还有可能先执行一个负奖励的动作,但后面可以得到正奖励超大的很多的动作(下一个版本会看到)。因此通常在训练时会引入一个随机性来探索更多的可能性。
这并不是一个很好的版本,因为通过这种方法训练出来的智能体非常短视,没有长期规划,每次只会执行当前状态下奖励最高的动作。但是当前采取的每个动作会影响接下来互动的发展。
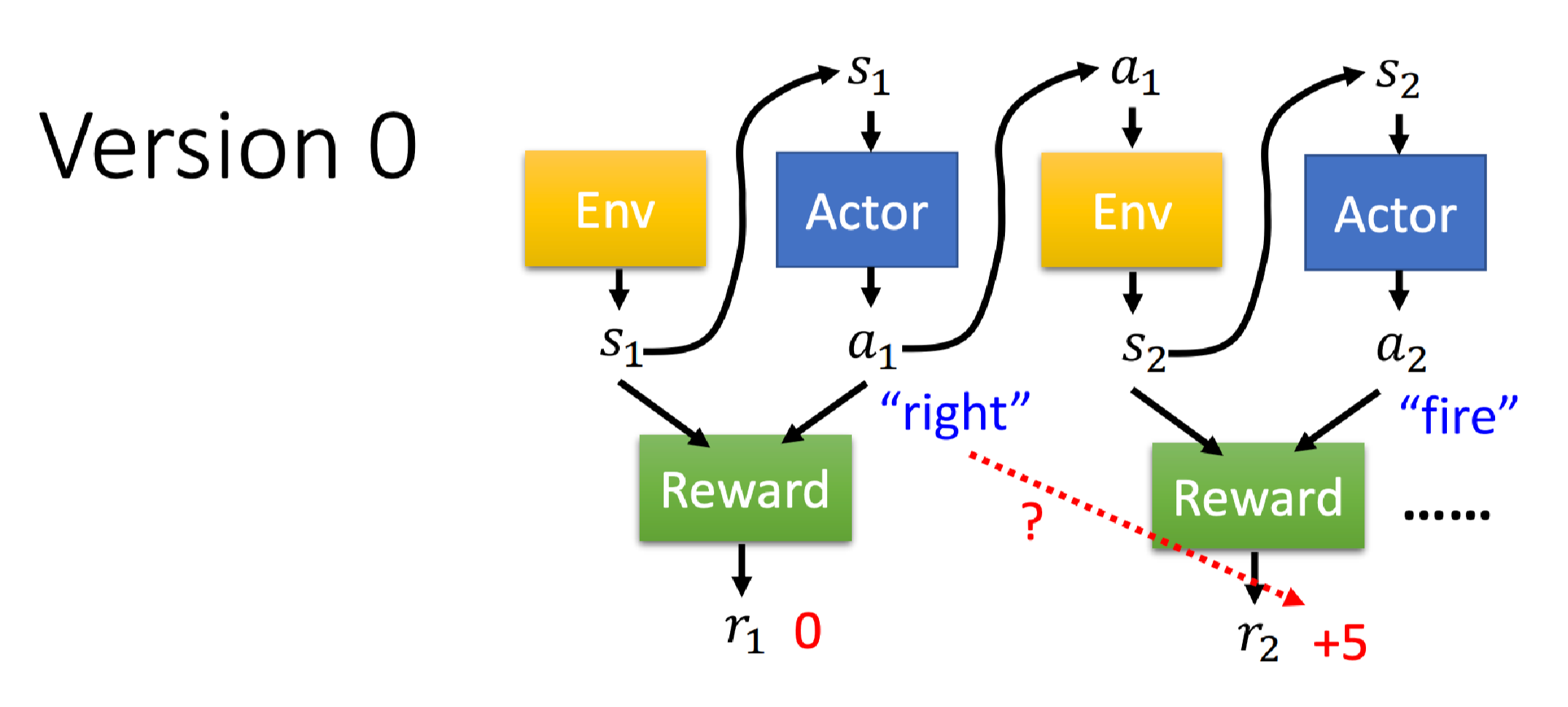
比如在看到 s 1 s_1 s1采取 a 1 a_1 a1会得到奖励 r 1 r_1 r1,但是会影响环境产生 s 2 s_2 s2,从而影响了奖励 r 2 r_2 r2。
举个例子,闯红灯是不好的(奖励-1),但如果车上有需急救病人,那么闯红灯可以更快地到达医院(奖励+100),那么这种情况下应该更灵活一点。
实际上智能体在和环境互动时还可能存在奖励延(Reward delay)问题,例如上面说的最大的奖励+100,智能体要学习牺牲短期奖励(瞬时奖励)来获取更多的长期奖励。
如果我们使用版本0来玩外星人入侵游戏,因为只有开火凯能获得正奖励,那么版本0会训练一个只会开火的无情机器,但不会躲弹的话很快就可以开下一把。
版本1
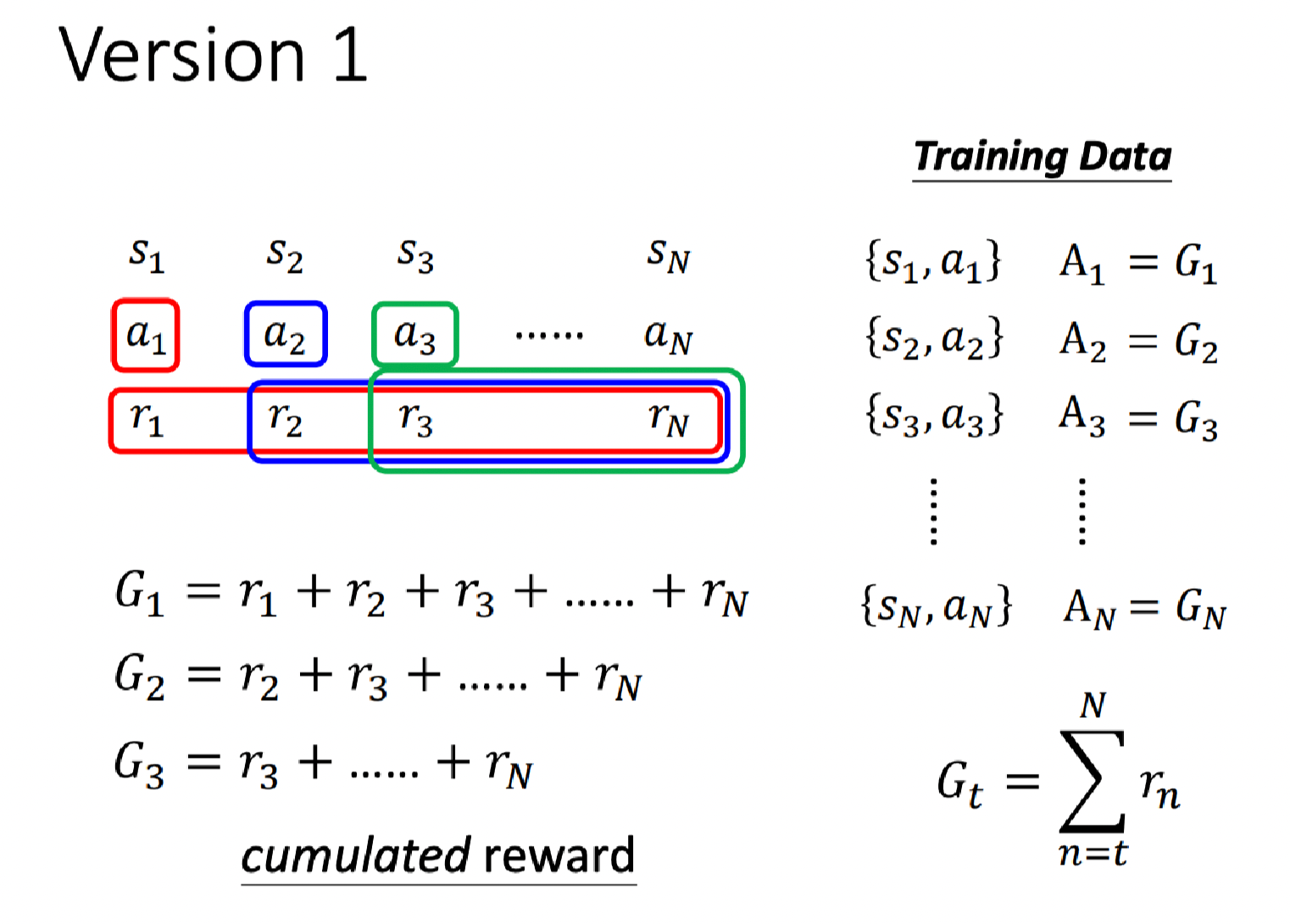
所以我们评价动作 a 1 a_1 a1有多好,不应该只看 r 1 r_1 r1,而是要看 r 1 r_1 r1和后续所有的奖励总和 G 1 = r 1 + r 2 + r 3 + ⋯ + r N G_1=r_1+r_2+r_3+\cdots + r_N G1=r1+r2+r3+⋯+rN。然后我们令 A 1 = G 1 A_1=G_1 A1=G1。
以此类推,评价动作 a 2 a_2 a2有多好,要通过 G 2 = r 2 + r 3 + ⋯ + r N G_2=r_2+r_3+\cdots + r_N G2=r2+r3+⋯+rN来看。
这里的 G G G称为累积奖励(cumulated reward):
G t = ∑ n = t N r n G_t = \sum_{n=t}^N r_n Gt=n=t∑Nrn
这个版本就可以解决智能体短视的问题,假设 a 1 a_1 a1是向右,没有立即的奖励,但是向右恰好躲掉了外星人的子弹,那么就可以存活的更久,也就会有更多的机会开火,最后得到的累积奖励更高。
但是版本1也有点问题,就是把后续所有的奖励和当前的奖励同等看待(默认前面的权重全为1),虽然我们做了 a 1 a_1 a1,最后得到了 r N r_N rN,是有一定的影响,但不应该这么高吧,更多的应该是和执行动作 a N a_N aN有关。
版本2
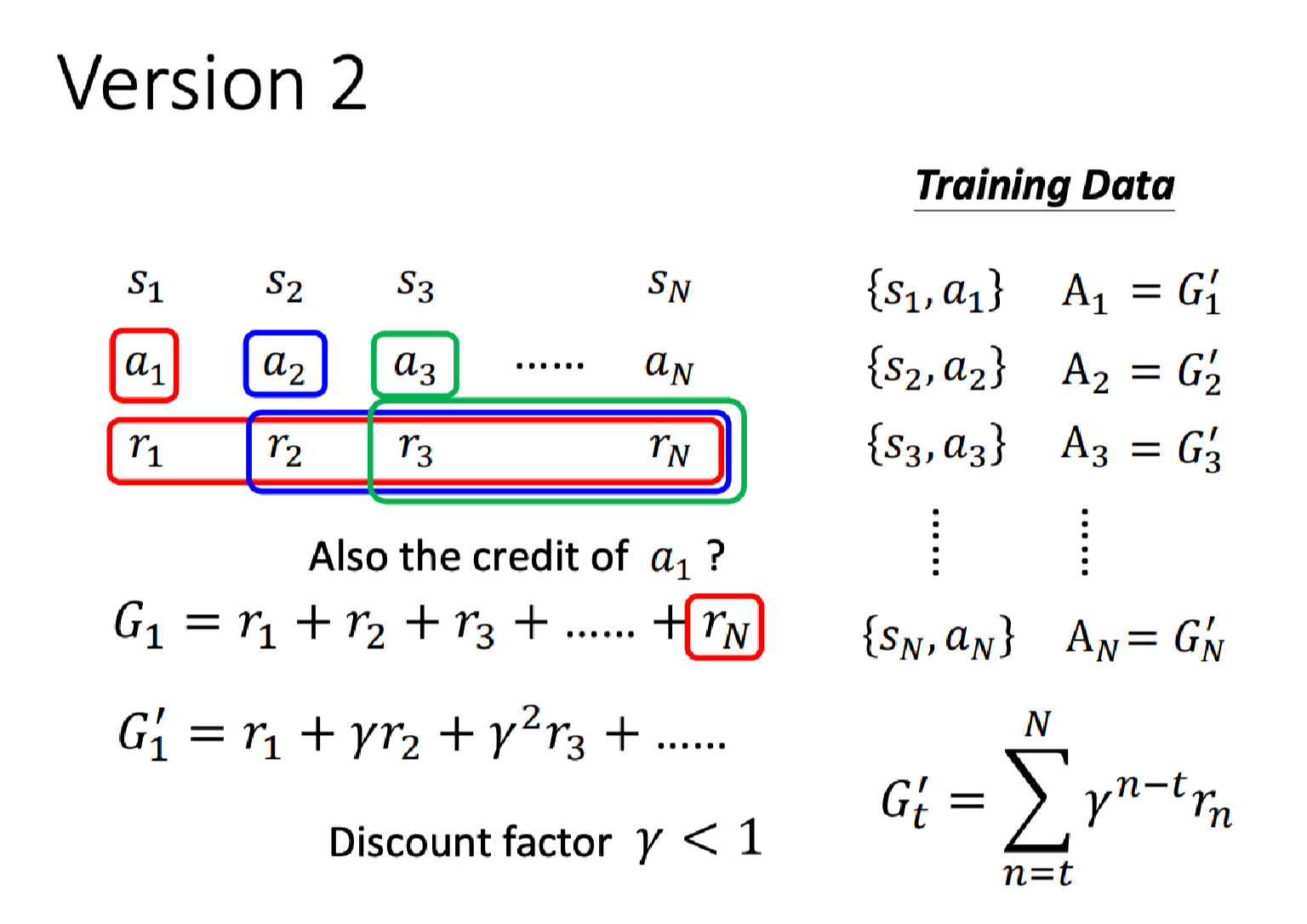
所以我们引入一个折扣因子 γ < 1 \gamma < 1 γ<1来表示后续影响持续衰退这件事情。
以执行动作 a 1 a_1 a1为例,瞬时奖励 r 1 r_1 r1前的系数还是设为1,因此此时受该动作影响最大。但后续的奖励我们累乘这个因子:
G 1 ′ = r 1 + γ r 2 + γ 2 r 3 + ⋯ G_1^\prime = r_1 + \gamma r_2 + \gamma^2 r_3 + \cdots G1′=r1+γr2+γ2r3+⋯
即使距离动作 a 1 a_1 a1越远, γ \gamma γ项乘的就越多。
得到了累积奖励的衰退版本:
G t ′ = ∑ n = t N γ n − t r n G_t^\prime = \sum_{n=t} ^N \gamma ^{n-t} r_n Gt′=n=t∑Nγn−trn
这个版本已经很好了,但是还有一个小问题。
版本3

奖励的好与坏其实应该是相对的,假设是一个非常解压的游戏,没有负奖励,类似场景中有非常多的金币,没有陷阱和阻碍,只要碰到金币就能拿到超过10的奖励,没有碰到也有10的奖励。那么相对来说,奖励10就是不好的。
所以我们可以引入一个偏置(baseline,这里通常翻译成偏置而不是基准)b,让奖励有正有负。
如上图所示,我们让每个 G ′ − b G^\prime - b G′−b。
听起来不错,但又引入了一个新的问题,我们要如何设定这个偏置大小呢?
下面正式进入策略梯度,它也包含了这个问题的解决。
策略梯度
我们先来看下策略梯度(Policy Gradient)的算法。
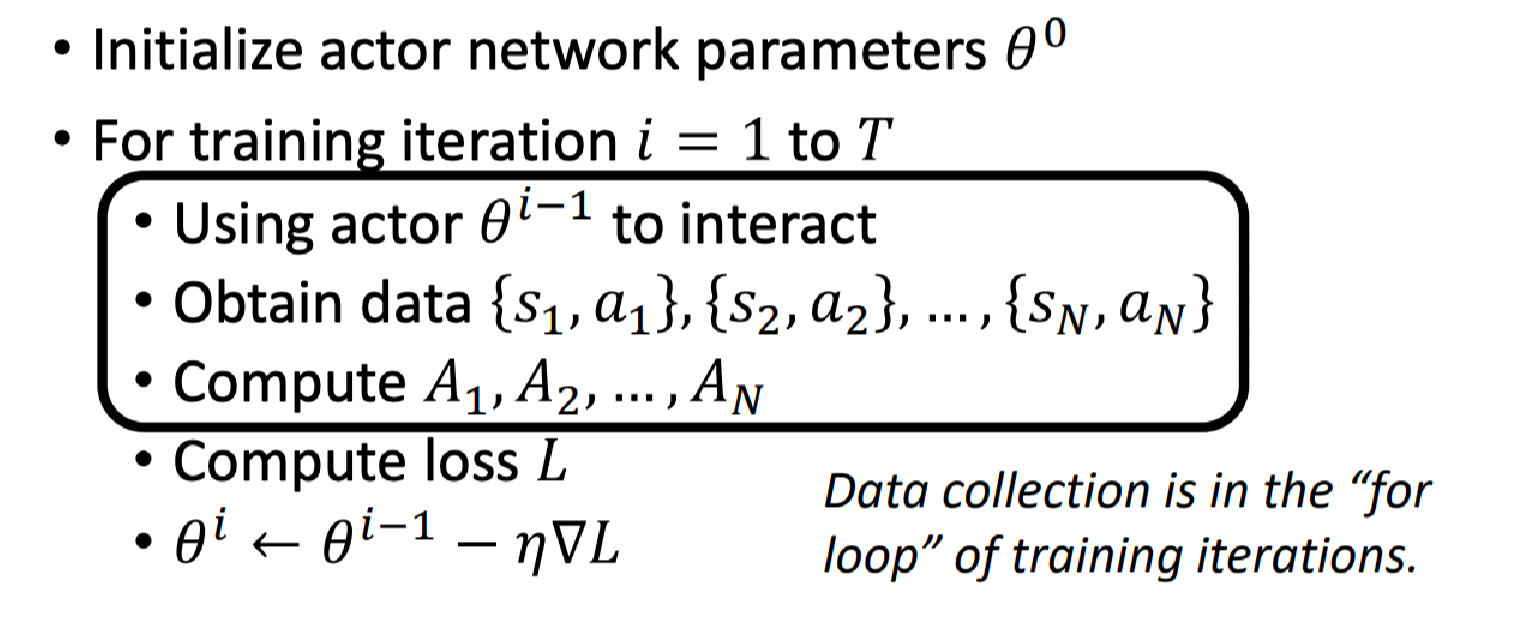
- 首先随机初始化Actor网络(表示执行动作的智能体网络,下文都用Actor表示),假设此时初始化参数为 θ 0 \theta^0 θ0;
- 进入训练迭代,假设迭代 T T T次,每次迭代记为 i i i:
- 使用上次迭代的Actor( θ i − 1 \theta^{i-1} θi−1)去与环境互动;
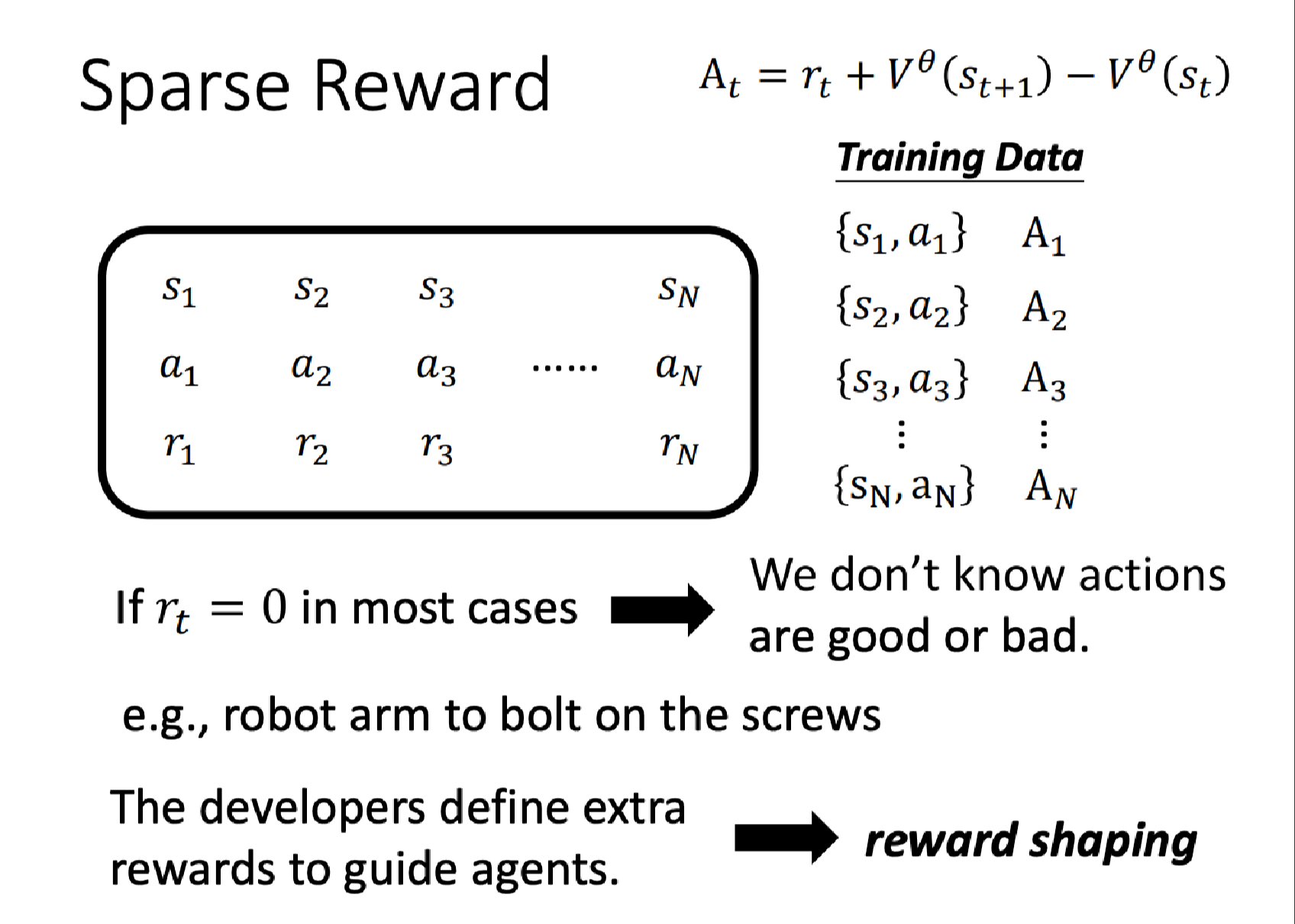
- 得到状态-动作对数据: { s 1 , a 1 } , { s 2 , a 2 } , ⋯ , { s N , a N } \{s_1,a_1\},\{s_2,a_2\},\cdots,\{s_N,a_N\} {s1,a1},{s2,a2},⋯,{sN,aN};
- 评价这些动作的好坏:计算 A 1 , A 2 , ⋯ , A N A_1,A_2,\cdots,A_N A1,A2,⋯,AN;
- 定义损失 L L L(该步以及下一步和梯度下降类似);
- 更新网络参数: θ i ← θ i − 1 − η ∇ L \theta^i \leftarrow \theta^{i-1} -\eta \nabla L θi←θi−1−η∇L;
算法重点的区别在于 A A A的定义。
这里要注意的是数据的收集是在训练循环内,通过上次迭代得到的网络来做的。
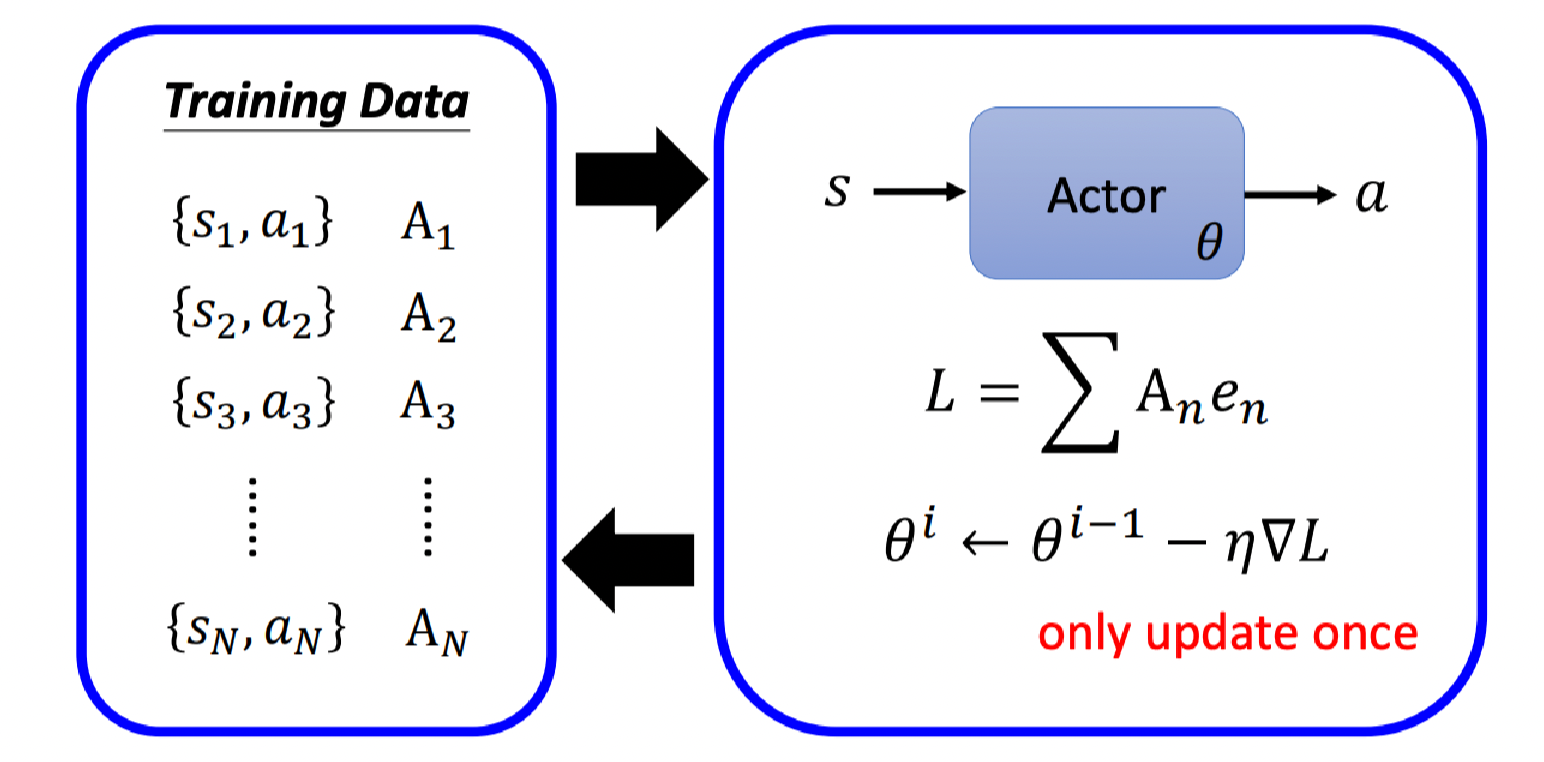
我们用图像化来表示,左边是收集到的数据,观测Actor在每个状态执行的动作,然后给予一个评价 A A A;然后拿这个评价定义一个损失来训练Actor;接着计算这个损失的梯度来更新一次Actor的参数;然后用更新后的Actor来重新收集数据;…
所以这样训练起来往往会耗时较久,因为我们在循环内还要执行收集数据这件事。
为什么我们每次要重新收集数据,而不是一直使用一份数据呢?
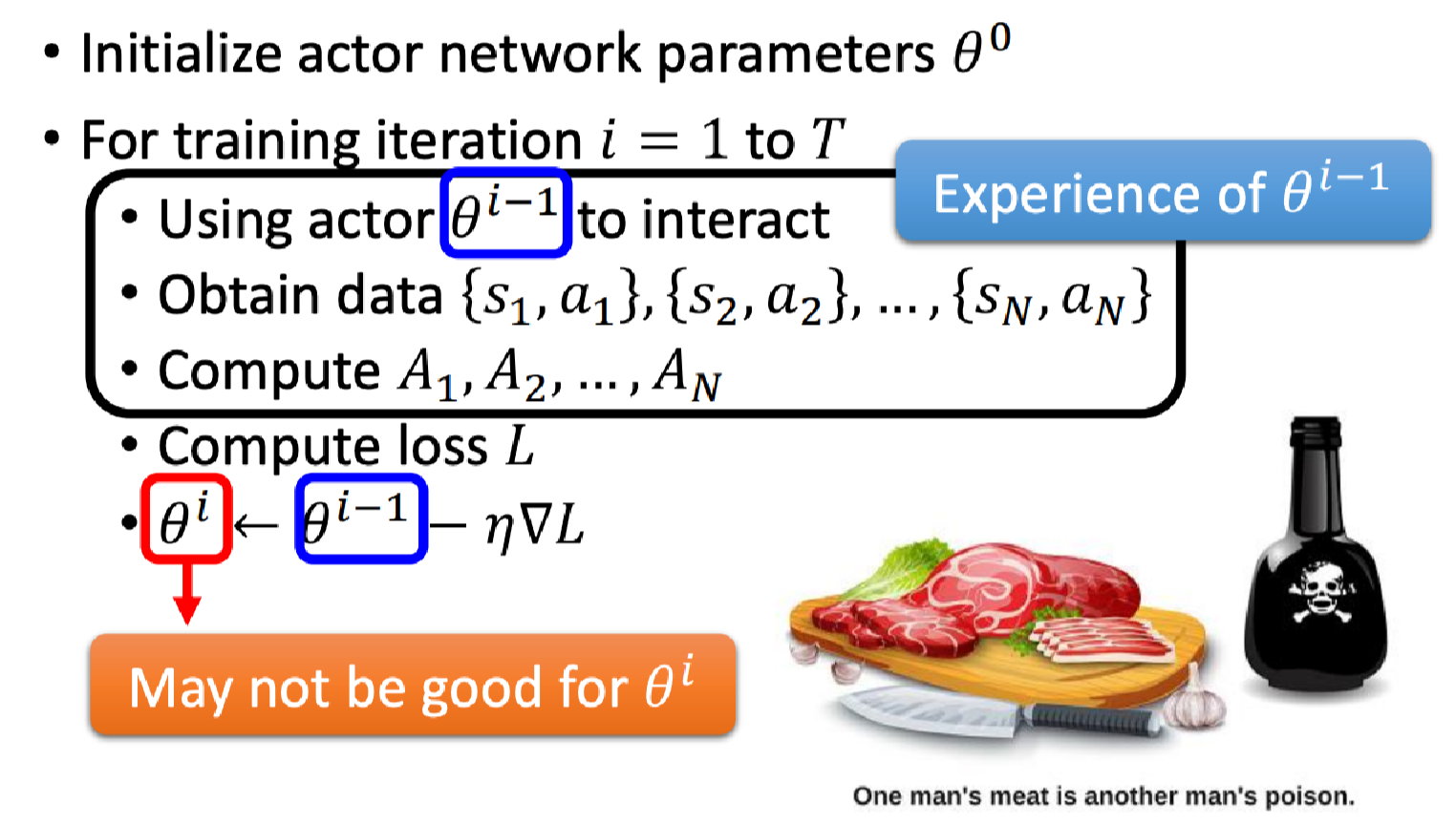
这里用一个简单的比喻,一个人的食物可能是另外一个人的毒药。
具体来说, θ i − 1 \theta^{i-1} θi−1所获得的经验(收集到的数据)对 θ i \theta^i θi来说不一定是好的。
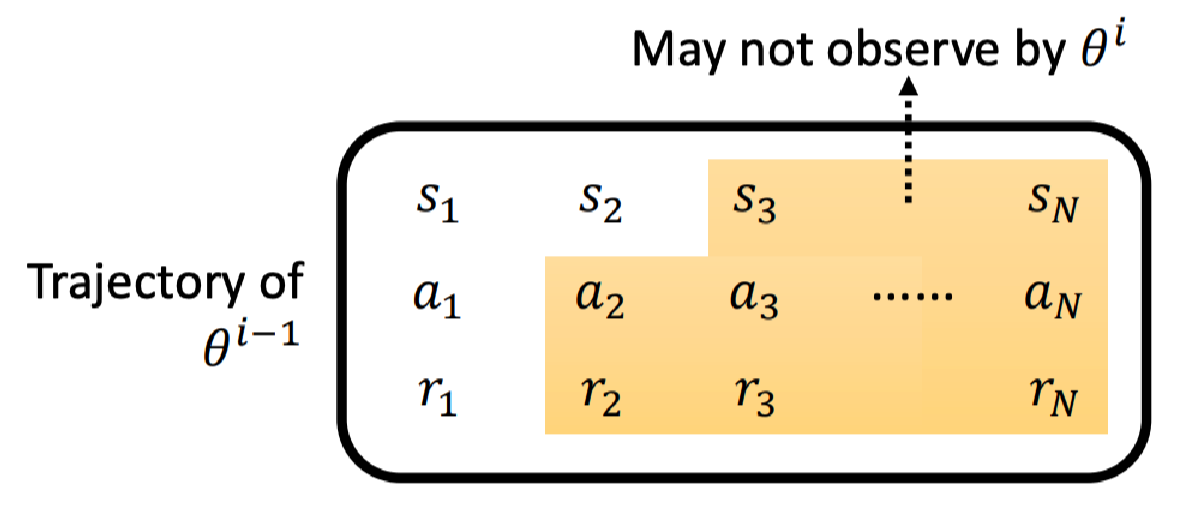
或者说, θ i − 1 \theta^{i-1} θi−1的轨迹不一定会被 θ i \theta^i θi观测到。
假设它们都可以在 s 1 s_1 s1采取 a 1 a_1 a1;但可能在 s 2 s_2 s2后采取的行为就不一样了。
On-policy v.s. Off-policy
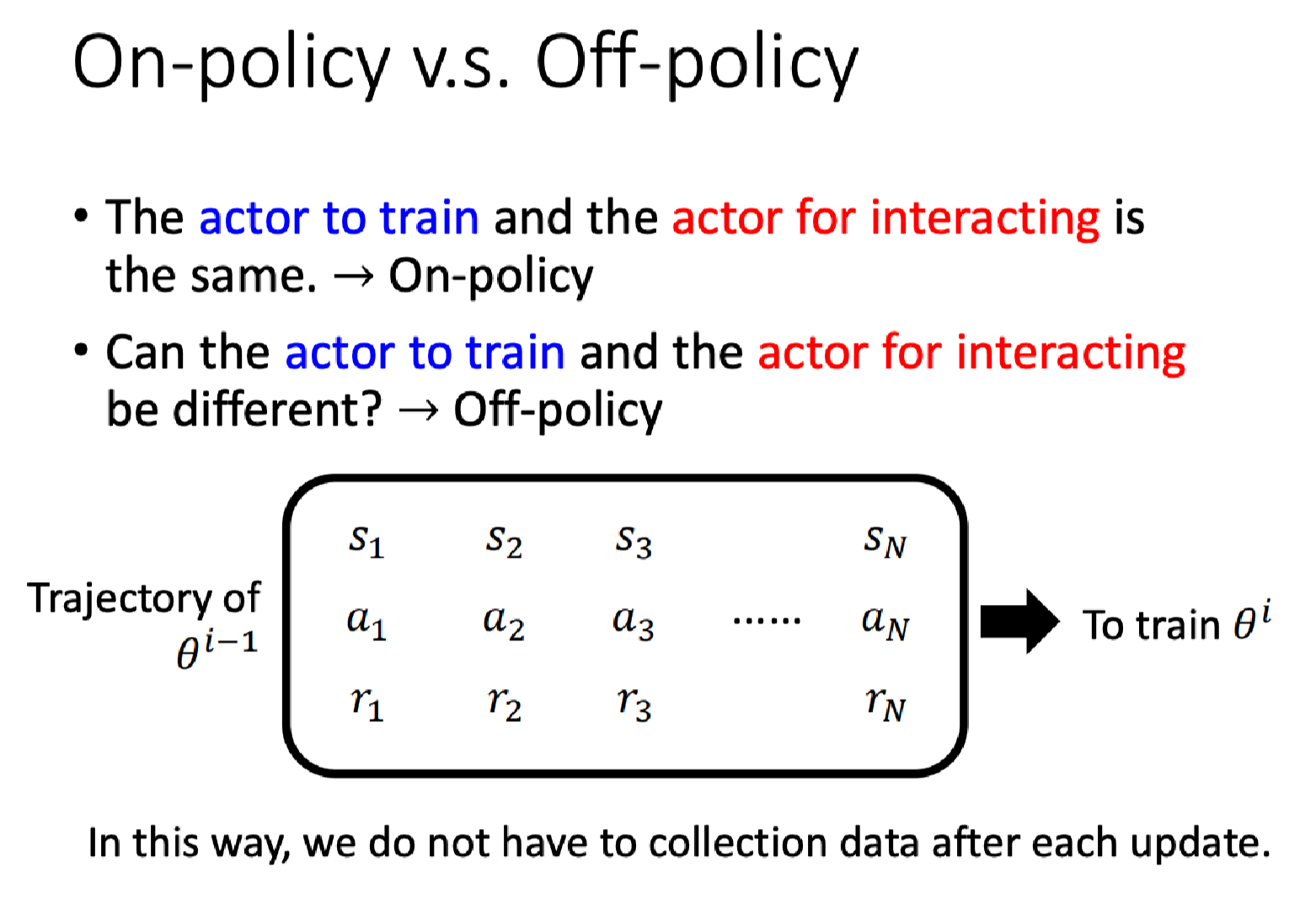
- 同策略(On-policy) 要训练的actor和交互的actor是同一个;
- 异策略(Off-policy) 要训练的actor和交互的actor不是同一个;
刚才我们介绍的是同策略的方法,其实还有一种是异策略的方法,用 θ i − 1 \theta^{i-1} θi−1收集的数据来训练 θ i \theta^i θi。后者有一个显著的优势是我们不必在每次更新后重新收集数据。
近端策略优化(PPO)
异策略的重点是知道自己(actor)和别人(interact)的差距。
PPO后面再学习。
探索
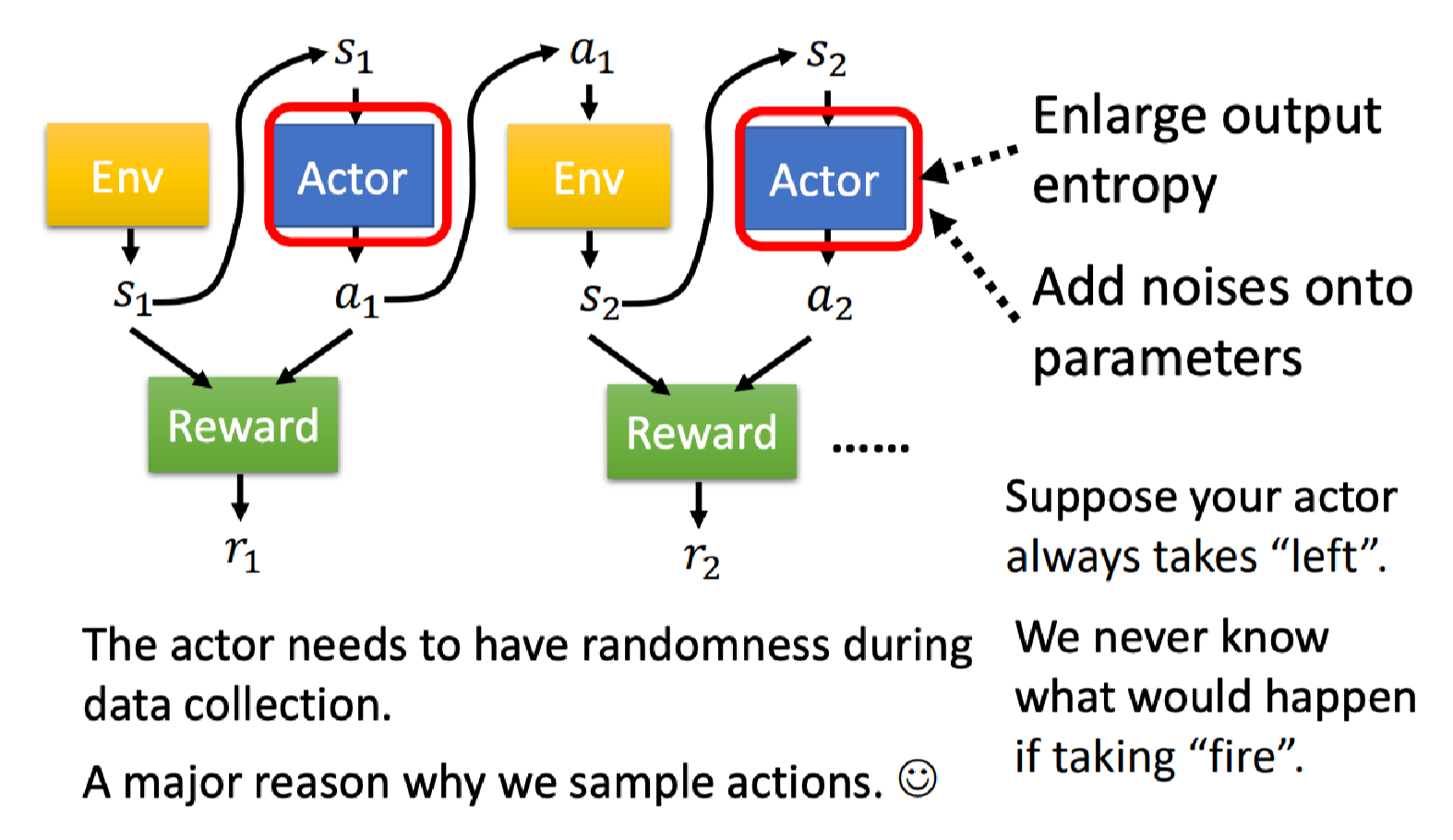
强化学习有一个重要的概念是探索(Exploration),我们上面说采取行为的时候是需要一些随机性的,这个随机性非常重要。
假设你初始的Actor只会向右移动,永远不知道开火后会发生什么。只有某个Actor执行了开火动作,它才会知道原来开火可以得到更大的奖励,甚至才可以实现最终赢得游戏。
因此在训练时和环境互动的Actor本身的随机性非常重要,甚至此时的随机性要大一点我们才可以收集到比较丰富的数据。才不会有一些状态-动作的奖励从来都不知道。


![[PyTorch][chapter 2][<span style='color:red;'>李</span><span style='color:red;'>宏</span><span style='color:red;'>毅</span><span style='color:red;'>深度</span><span style='color:red;'>学习</span>-Regression]](https://img-blog.csdnimg.cn/8fb0d0058b864981becfb8399072d552.png)
![[PyTorch][chapter 9][<span style='color:red;'>李</span><span style='color:red;'>宏</span><span style='color:red;'>毅</span><span style='color:red;'>深度</span><span style='color:red;'>学习</span>][CNN]](https://img-blog.csdnimg.cn/direct/0bc0d7ec3d454d738c8627ab6a3b6b04.png)