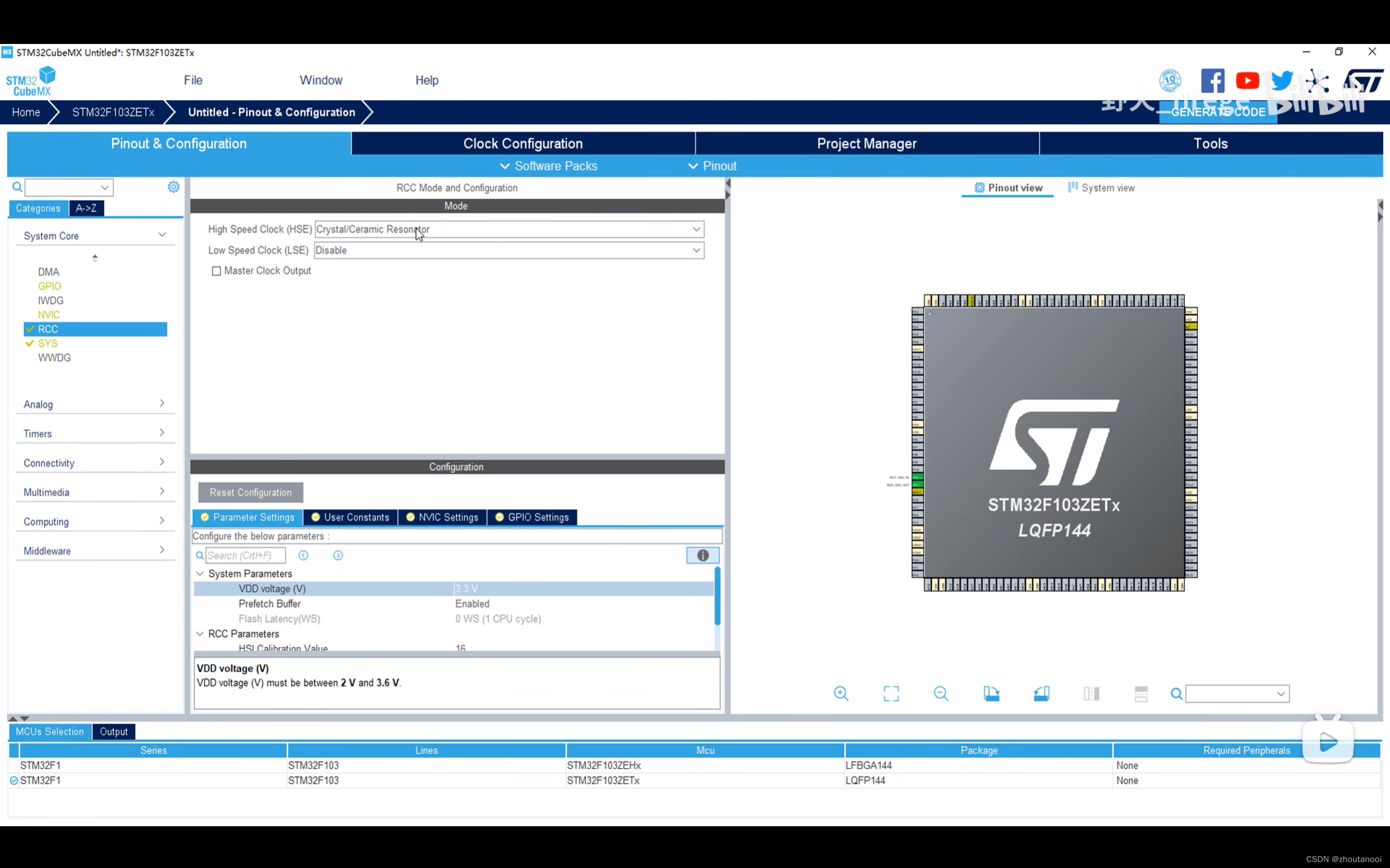
1.时钟配置HSI主频配置64M

2.配置好串口,选择异步模式

3.配置TIM1_CH1产生1KHz的信号,主频64MHz,分频(64-1),计数周期(1000-1),这样即可生成1KHz信号。

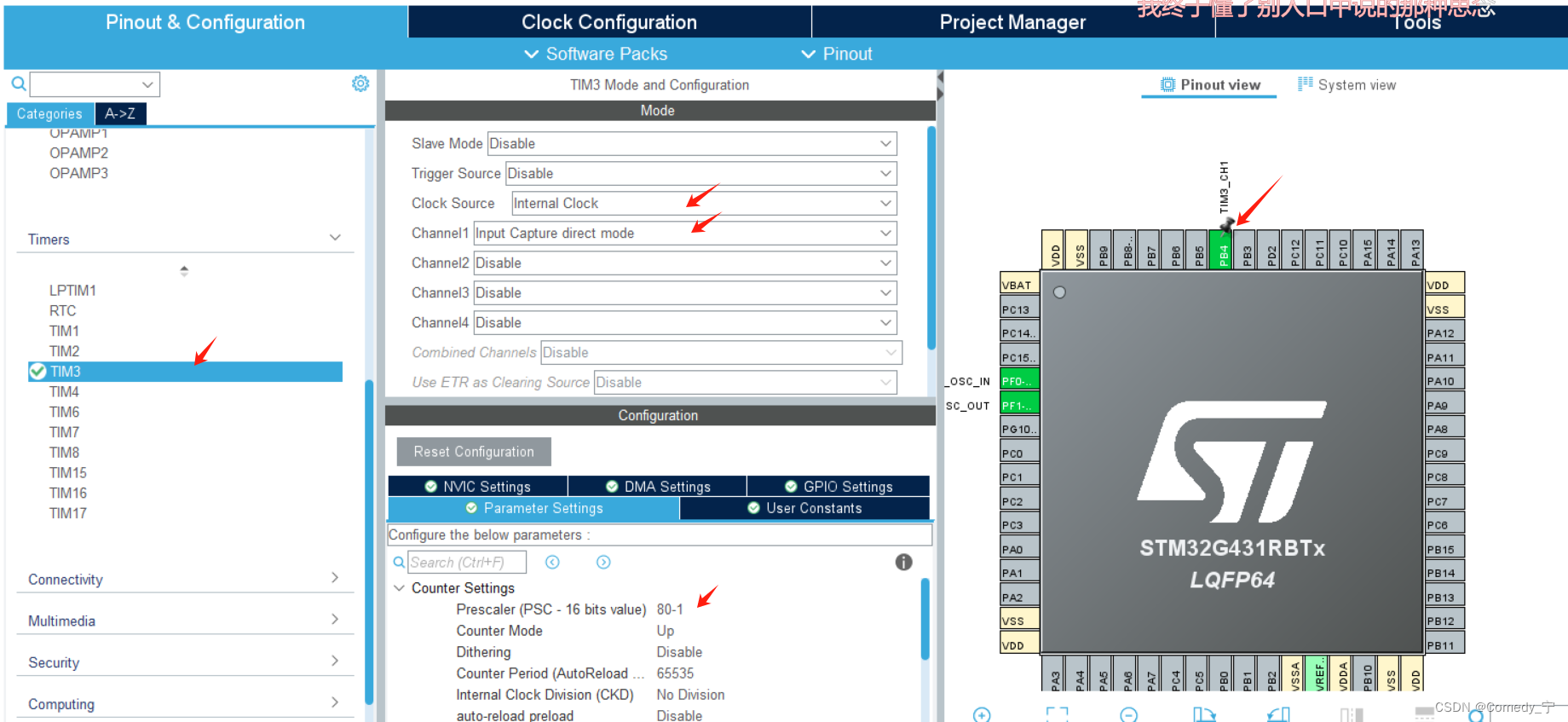
4.配置TIM3_CH1和TIM3_CH2做输入捕获。

配置好需要的开发环境并获取代码
修改main.c
串口重定向
#include "stdio.h"
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}串口重定向一定要勾选Use Micro LIB

增加TIM1_Channel1_Set函数
void TIM1_Channel1_Set(uint8_t val)
{
uint16_t temp = 0;
temp = (val * 10);
TIM_OC_InitTypeDef sConfigOC = {0};
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = temp;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
printf("temp = %d\r\n", temp);
//HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1);
}MX_TIM3_Init函数修改
void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_SlaveConfigTypeDef sSlaveConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_IC_InitTypeDef sConfigIC = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 64-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 65535;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_IC_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sSlaveConfig.SlaveMode = TIM_SLAVEMODE_RESET;
sSlaveConfig.InputTrigger = TIM_TS_TI1FP1;
sSlaveConfig.TriggerPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sSlaveConfig.TriggerFilter = 0;
if (HAL_TIM_SlaveConfigSynchro(&htim3, &sSlaveConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_RISING;
sConfigIC.ICSelection = TIM_ICSELECTION_DIRECTTI;
sConfigIC.ICPrescaler = TIM_ICPSC_DIV1;
sConfigIC.ICFilter = 0xf;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sConfigIC.ICPolarity = TIM_INPUTCHANNELPOLARITY_FALLING;
sConfigIC.ICSelection = TIM_ICSELECTION_INDIRECTTI;
sConfigIC.ICFilter = 0;
if (HAL_TIM_IC_ConfigChannel(&htim3, &sConfigIC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_IC_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_IC_Start(&htim3, TIM_CHANNEL_2);
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}主函数修改
int main(void)
{
uint16_t Pulse_Value = 0;
uint16_t Duty_Value = 0;
uint16_t freq;
uint16_t duty;
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM1_Init();
MX_TIM3_Init();
MX_USART1_UART_Init();
printf("main init\r\n");
TIM1_Channel1_Set(30);
while (1)
{
Pulse_Value = HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_1);
Duty_Value = HAL_TIM_ReadCapturedValue(&htim3, TIM_CHANNEL_2);
HAL_Delay(1000);
if(Pulse_Value != 0)
{
freq = 1000000 / (Pulse_Value + 1);
duty = 100 * (Duty_Value + 1) / Pulse_Value;
printf("freq = %d\r\n", freq);
printf("duty = %d\r\n", duty);
printf("Pulse_Value = %d\r\n", Pulse_Value);
printf("Duty_Value = %d\r\n", Duty_Value);
}
}
}串口打印