REVIEW
上次学习了一下软件使用流程zynq PS点灯-CSDN博客
本次学习一下C编程基础与调试方法
1. 硬件编程原理
小梅哥视频链接: 07_Xilinx嵌入式裸机硬件编程原理_哔哩哔哩_bilibili 对应的课程笔记:【zynq课程笔记】【裸机】【第7课 】【硬件编程原理】 - ACZ702开发板 - 芯路恒电子技术论坛 - Powered by Discuz! (corecourse.cn) |
①典型GPIO结构 |
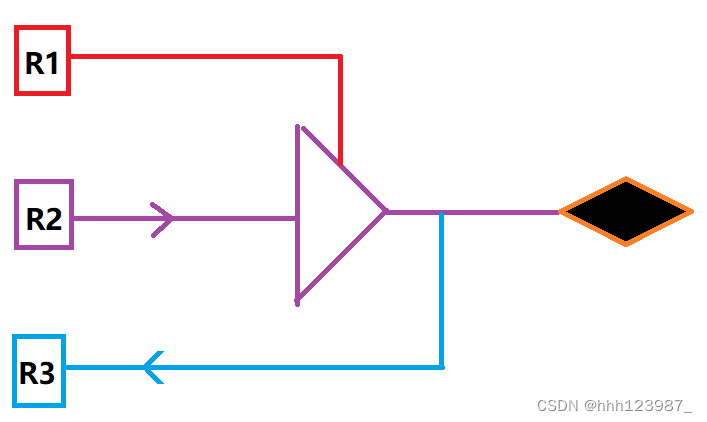 |
| R1:方向/输出使能控制寄存器 R2:输出状态/数据寄存器 R3:输入状态/数据寄存器 |
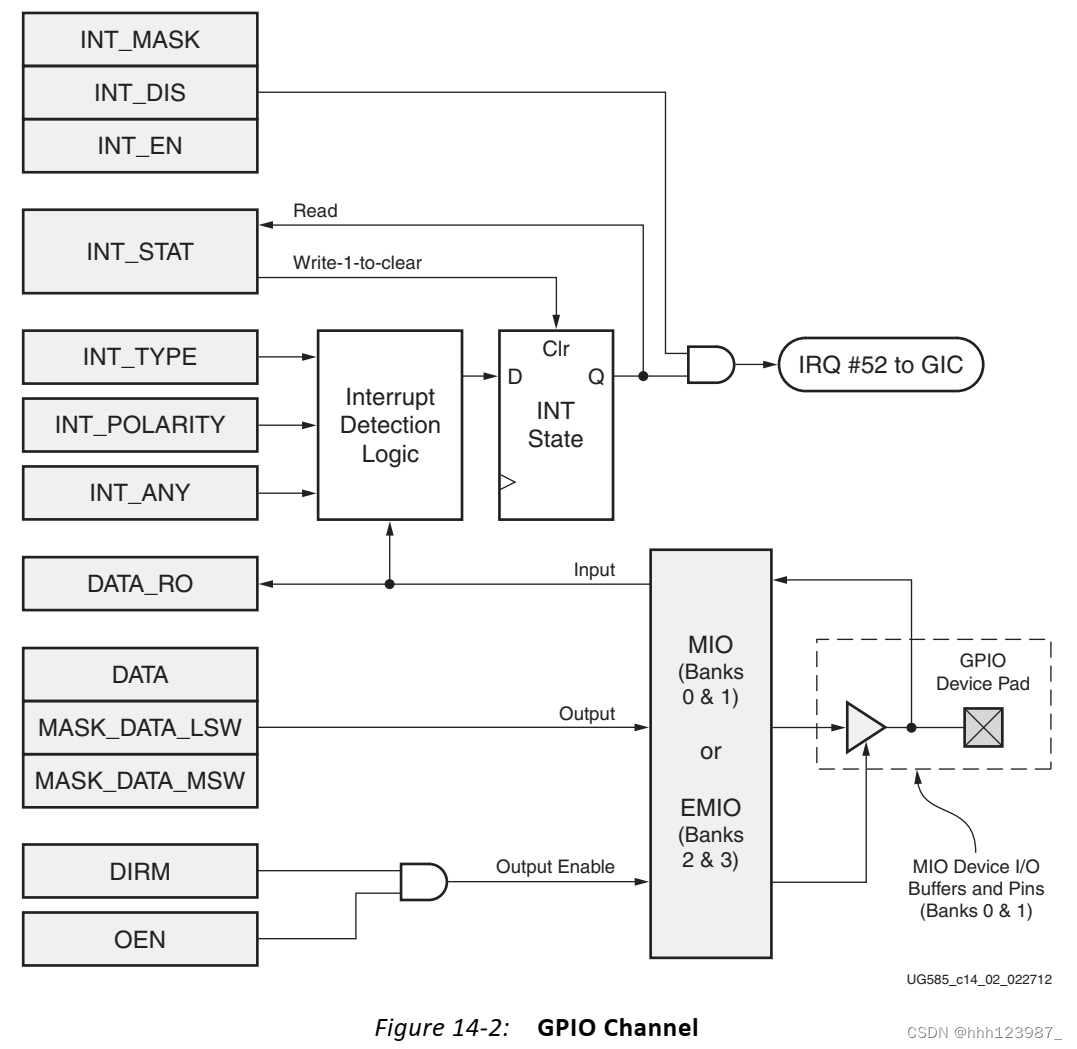
②Zynq7000 GPIO结构 |
|
③GPIO控制的编程思路 |
初始化 若不开启中断,则在需要的时候直接读取输入寄存器的值。 |
2. 寄存器操作
小梅哥视频:06_Zynq SoC嵌入式逻辑C编程基础_哔哩哔哩_bilibili 课程笔记:【zynq课程笔记】【裸机】【第6课 】【C编程基础】 - ACZ702开发板 - 芯路恒电子技术论坛 - Powered by Discuz! (corecourse.cn) |
|
| cpu编程,本质上就是对指定地址进行读写操作 | |
视频课程用到的代码:实现让开发板上的PS_LED0亮灭 端口为MIO7
|
|
| 场景分析:该场景下只需要简单的控制GPIO的对应位输出高低电平即可,用不到中断功能。 初始化 关闭中断 INT_DIS/ INT_EN: 这是一组作用于同一个功能的2个独立的寄存器,一个负责使能GPIO的每一位的中断,另一个负责禁止GPIO的每一位的中断。 本应用中,对应GPIO无需开启中断,所以设计时针对INT_DIS/ INT_EN寄存器,需要明确: 关闭某位中断该操作哪个寄存器,往该寄存器写0关闭中断,还是写1关闭中断。 根据UG585中的描述,对INT_DIS寄存器的对应位写1就可以禁止该位对应的IO产生中断。所以本例中初始化时,理论上需要对INT_DIS寄存器进行操作。设置MIO7对应的中断控制位不打开。 Data = (1<<7); Xil_Out32(XPAR_PS7_GPIO_0_BASEADDR + XGPIOPS_INTDIS_OFFSET, Data); |
|
#include "stdio.h" int main(void) //设置方向和输出使能 //设置IO方向,bit7的方向为输出 //设置输出使能,bit7输出使能 |
|
//设置方向和输出使能 由于是点亮LED,属于输出型GPIO,因此,根据GPIO的结构图知道,需要使output enable信号为高电平,以使能IO Pin上的三态缓冲器输出。 而output enable为1的条件则是OUTEN和DIRM两个寄存器对应的位都为1。 需要采用read-modify-write的操作顺序,也就是先读出,再修改,最后再写回。 |
|
while(1) //MASK_DATA寄存器 //设置bit7输出0 |
|
//MASK_DATA寄存器 写MASK_DATA寄存器时需要注意,对于每一个GPIO Bank,由MASK_DATA_LSW和MASK_DATA_MSW两个寄存器组成,其中MASK_DATA_LSW控制该组GPIO中低16位的状态,MASK_DATA_MSW控制该组GPIO中高16位的状态。 |
|
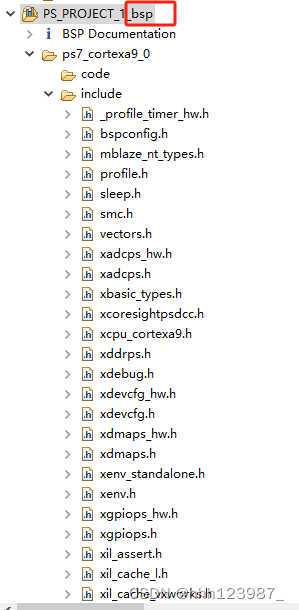
① bsp(board support package)板级支持包 |
|
|
|
用户编程时,可以使用该支持包中提供的驱动和函数,来避免自己编写应用函数和基于寄存器读写的驱动。 由于这些驱动程序中加了很多安全判断和兼容操作,所以,在对程序尺寸和运行效率要求不高的场合,推荐使用BSP提供的驱动和函数,而在对性能和程序尺寸有要求的场合,推荐自己编写基于寄存器读写的驱动。 //对与本摸鱼怪来说,这一点后面需要的话,再肥来恶补知识叭~ |
|
② 如何实现对指定地址的读写操作 |
|
使用指针 |
|
例如对地址为0x00000020的寄存器进行读写,就可以使用下面的形式: 读寄存器:return (volatile u8 ) 0x00000020; 写寄存器:(volatile u8 ) 0x00000020 = 0x12; |
|
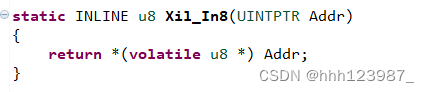
使用IO读写函数 xil_io.h |
|
Xil_In8(addr); Xil_In16(addr); Xil_In32(addr); Xil_In64(addr); |
Xil_Out8 (addr, data); Xil_Out16(addr, data); Xil_Out32(addr, data); Xil_Out64(addr, data); |
这些函数就是对指针操作的封装 |
|
③ 如何知道各个外设的硬件信息(寄存器地址,位功能) |
|
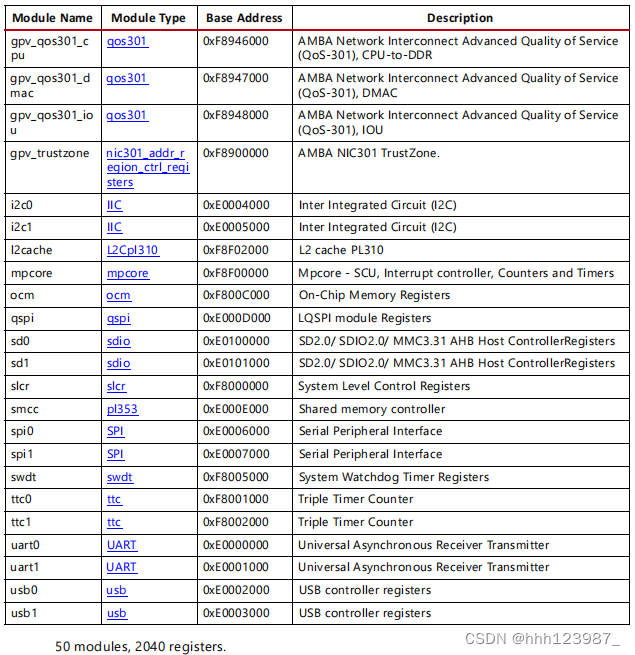
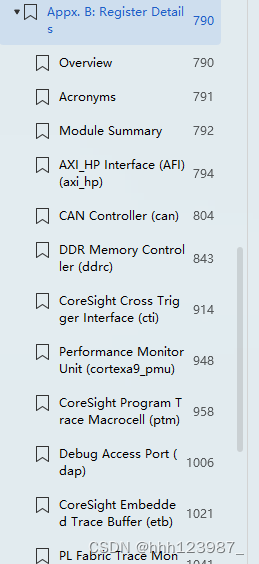
查看datasheet |
|
在UG585的附录B中,有所有外设的每个寄存器的地址和功能描述。 |
|
|
|
 |
|
 |
|
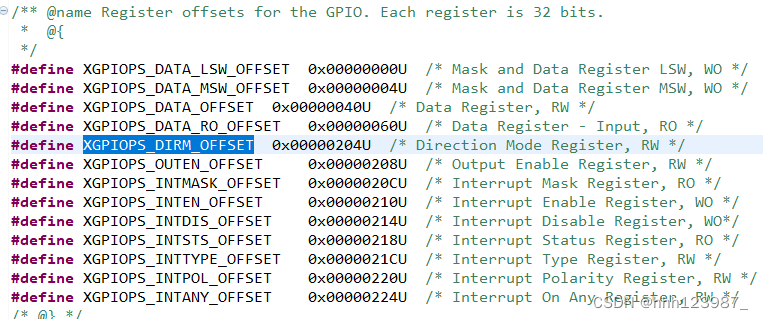
reg_val = Xil_In32(XPAR_PS7_GPIO_0_BASEADDR + XGPIOPS_DIRM_OFFSET); XPAR_PS7_GPIO_0_BASEADDR 为基地址
XGPIOPS_DIRM_OFFSET 为偏移地址
|
|
使用BSP提供的驱动和硬件信息文件 |
|
在bsp工程中,Xilinx为每一个硬件功能都提供了描述其寄存器地址和位功能的.h文件: 这类文件字母x开头,然后紧跟外设功能名,最后以_hw结尾。 例如,对于GPIO,提供的该文件名为xgpiops_hw.h, 对于串口(uart),提供的该文件名为xuartps_hw.h, 对于SD/MMC外设控制器,提供的该文件名为xsdps_hw.h。
需要注意的是,SDK在生成BSP时,会仅针对系统中配置使能了的硬件生成硬件信息文件,对于没有配置使能的硬件,则可能不会生成硬件信息文件,例如我们开发流程课程中,因为没有使能SD/MMC外设和UART外设,所以在SDK中生成的LED_bsp下就找不到刚刚说的xsdps_hw.h和xuartps_hw.h。 |
|
④如何实现程序中的延时 |
|
对精度要求较高的延时,可以使用BSP中提供的基于CPU心跳定时器的定时/延时函数,例如 微秒单位延迟:usleep(unsigned long useconds) 秒单位延迟:sleep(unsigned int seconds) |
|
⑤使用跨平台可移植的数据类型 |
|
include “stdint.h” uint8_t us8_type; uint16_t us16_type; uint32_t us32_type; uint64_t us64_type; int8_t s8_type; int16_t s16_type; int32_t s32_type; int64_t s64_type; |
|



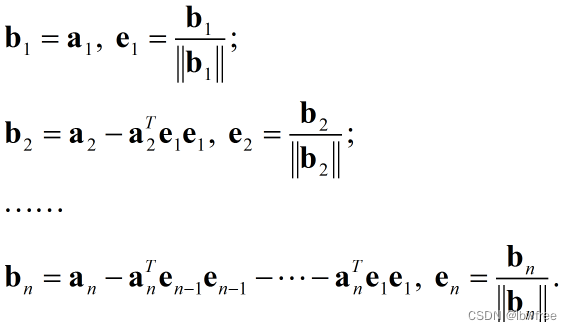
3. 使用硬件库进行编程
小梅哥视频链接: 08_基于SDK硬件驱动库的编程方法_哔哩哔哩_bilibili 对应的课程笔记:【zynq课程笔记】【裸机】【第8课 】【使用SDK硬件驱动库】 - ACZ702开发板 - 芯路恒电子技术论坛 - Powered by Discuz! (corecourse.cn) |
|
#include "xgpiops.h" #include "unistd.h"
XGpioPs_Config *ConfigPtr;
{ ConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID); XGpioPs_CfgInitialize(&Gpio, ConfigPtr, ConfigPtr->BaseAddr);
XGpioPs_SetOutputEnablePin(&Gpio, 7, 1);
{ //设置bit7输出1 XGpioPs_WritePin(&Gpio, 7, 0x1); usleep(500000);
XGpioPs_WritePin(&Gpio, 7, 0x0); usleep(500000); } return 0; } |
|
XGpioPs_LookupConfig |
寻找指定GPIO设备的配置信息 |
XGpioPs_CfgInitialize |
对GPIO的驱动程序进行初始化 |
XGpioPs_SetDirectionPin |
设置指定Pin的方向 |
XGpioPs_SetOutputEnablePin |
设置指定Pin的输出使能 |
XGpioPs_WritePin |
写/更新指定管脚的值/状态 |
4.调试
小梅哥视频: 09_Zynq SoC ARM裸机程序调试方法_哔哩哔哩_bilibili 对应课程笔记:【zynq课程笔记】【裸机】【第9课 】【裸机程序调试方法】 - ACZ702开发板 - 芯路恒电子技术论坛 - Powered by Discuz! (corecourse.cn) |
|
|


5. 小作业
①GPIO_MIO PS按键控制PS_LED闪烁 |
|
#include "COMMON.h" int main(void) //设置 PS_LED(MIO7)为输出并且初始为低电平 while(1) //读取 PS_KEY 的电平值并存储到 State_PS_KEY 变量里 //将 State 变量的值取非赋予 PS_LED 来输出 |
while(!PS_GPIO_GetPort(PS_KEY)) 嘎嘎~这个是调试出来的小问题: while(State_PS_KEY ) //将 State 变量的值取非赋予 PS_LED 来输出 State_PS_KEY = PS_GPIO_GetPort(PS_KEY); 这个小问题,自己调试一下就可以发现啦~ 好久没写C,还是要好好熟练一下~ |
| 或者是: |
#include "xgpiops.h" XGpioPs Gpio; int main(void) //设置MIO7为输出 //设置MIO47为输入 while(1) //设置bit7输出0 //设置bit7输出0 return 0; |
②GPIO_EMIO PL按键控制PS_LED、PL_LED交替闪烁
|
#include "xgpiops.h" XGpioPs Gpio; int main(void) ConfigPtr = XGpioPs_LookupConfig(XPAR_PS7_GPIO_0_DEVICE_ID);
/*设置EMIO1为输入*/ while(1) //设置bit54输出0 //设置bit54输出0 return 0; |
| //啦啦啦,摸鱼结束~ |