3D点云焊缝提取 平面交线 投影
- 开发
- 27
-
1. 效果
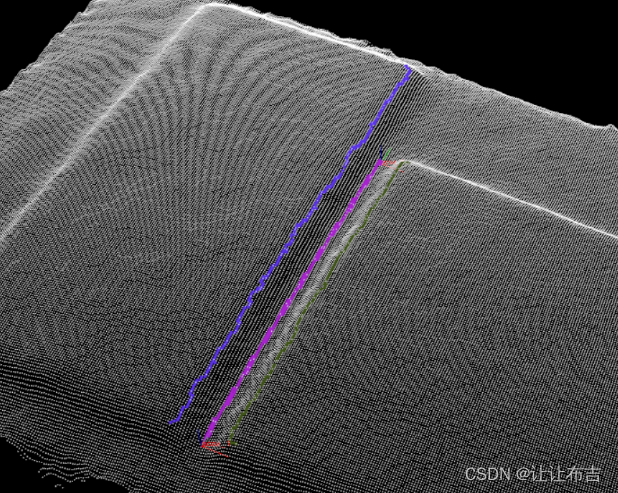
2. 思路
- 计算点云法向量;
- 计算点云位姿Pose;
- 翻转Pose中的Z轴方向,使其一致;
- 通过Pose的Z轴对点云进行方向过滤;
- 对点云聚类;
- 根据目标点云的高度提取目标点云;
- 提取两块点云的四个角点
- 提取边缘;
- 通过Pose对点云进行变换;
- 最小外接矩形获取四个角点;
- 确定两块点云距离最近的两条边缘,即目标
- 根据点到直线的距离确定具有最长边的点云;
- 根据角点之间连线的距离确定最长边对应的角点;
- 通过点到直线的距离确定另外点云中最近的两个角点;
- 通过上述确定的长短边的角点构建新的坐标系;
- 基于新的坐标系对边缘点进行条件滤波,提取焊缝两边的边缘界限;
- 基于新的坐标系和角点,提取焊缝到边缘界限的斜坡点云;
- 对提取的斜坡对应的点拟合平面;
- 计算拟合两平面交线;
- 将短边的角点投影到交线上,作为焊缝的起点和终点;
- 其焊缝的起点和终点构建向量,计算点到向量的距离,通过阈值确定焊缝;
3. 源码
演示视频:焊缝提取
原文地址:https://blog.csdn.net/lddx_123456/article/details/139279004
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1798399390650601472.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!





























![[Redis]Zset类型](https://img-blog.csdnimg.cn/direct/be9e257eb6794c4783d31acaaf30f303.png)