<Halcon> 变换矩阵求解
- 开发
- 16
-
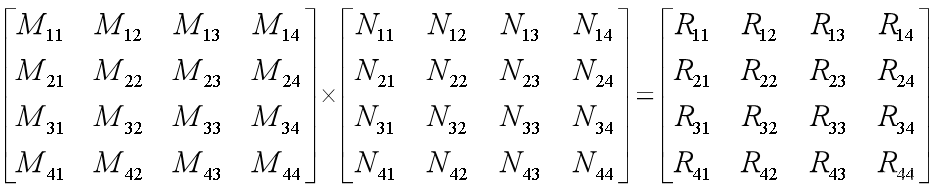
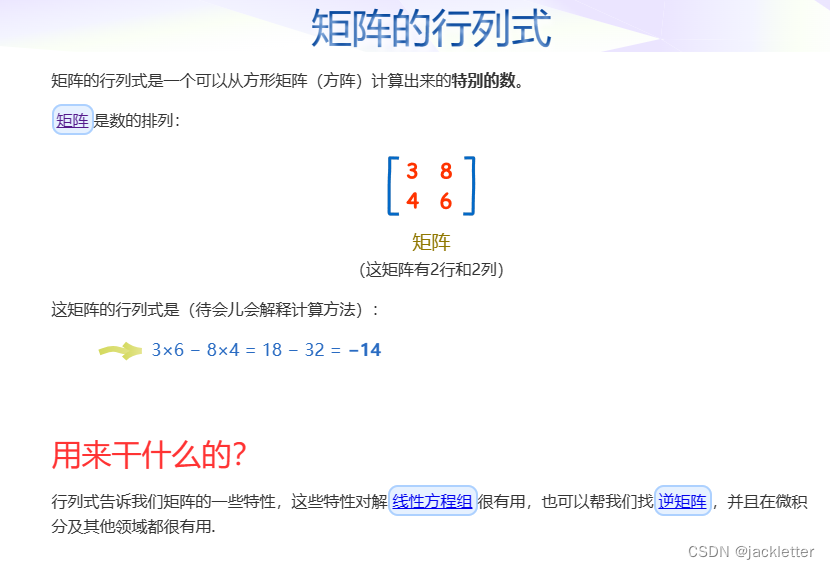
变换矩阵求解
- hom_mat2d_translate( : : HomMat2D, Tx, Ty : HomMat2DTranslate)
hom_mat2d_translate通过向量t = (Tx,Ty)向齐次二维变换矩阵HomMat2D添加平移,得到平移矩阵;
- vector_to_rigid( : : Px, Py, Qx, Qy : HomMat2D)
vector_to_rigid近似于刚性仿射变换,即由至少两个点对应的旋转和平移组成的变换;
- vector_to_similarity( : : Px, Py, Qx, Qy : HomMat2D)
vector_to_similarity近似于相似变换,即由至少两个点对应的均匀缩放,旋转和平移组成的变换;
- vector_to_aniso( : : Px, Py, Qx, Qy : HomMat2D)
vector_to_aniso近似于一个各向异性相似变换,即一个由旋转、非均匀缩放和平移组成的变换,至少从三个点对应;
- vector_to_hom_mat2d( : : Px, Py, Qx, Qy : HomMat2D)
vector_to_hom_mat2d从至少三个点对应近似仿射变换;
- vector_angle_to_rigid( : : Row1, Column1, Angle1, Row2, Column2, Angle2 : HomMat2D)
vector_angle_to_rigid计算一个刚性仿射变换,即由一个点对应和两个对应角度的旋转和平移组成的变换;
- hom_mat2d_to_affine_par( : : HomMat2D : Sx, Sy, Phi, Theta, Tx, Ty)
计算对应齐次二维变换矩阵HomMat2D的仿射变换参数;参数Sx和Sy分别决定了转换后的涨缩比例;角度Theta描述了变换后的旋转角度;参数Tx和Ty决定了两个坐标系的平移;
原文地址:https://blog.csdn.net/thisiszdy/article/details/137562579
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。
本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。
如若转载,请注明出处:https://www.suanlizi.com/kf/1779008134321410048.html
如若内容造成侵权/违法违规/事实不符,请联系《酸梨子》网邮箱:1419361763@qq.com进行投诉反馈,一经查实,立即删除!