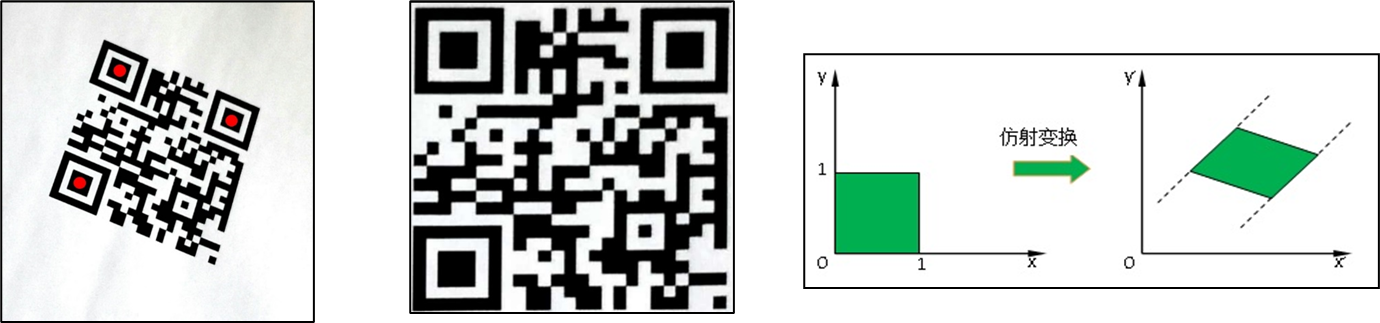
说明:一开始将目光放在了opencv上,发现只有4、6自由度的仿射变换求解,后来发现skimage十分强大。
注:美中不足的是,skimage的实现没有RANSAC。
function:skimage.transform.estimate_transform()
ttype='euclidean',3自由度
ttype='similarity',4自由度
ttype='similarity',6自由度
具体使用请看官网以及source code.skimage.transform — skimage 0.22.0 documentation (scikit-image.org)![]() https://scikit-image.org/docs/stable/api/skimage.transform.html#skimage.transform.estimate_transform
https://scikit-image.org/docs/stable/api/skimage.transform.html#skimage.transform.estimate_transform

























![[蓝桥杯 2016 省 AB] 四平方和](https://img-blog.csdnimg.cn/direct/e9e380cc001e43919b3db04e0eb57a45.png)