基本概述
实现基于自适应航迹评价函数权重的动态窗口法(Dynamic Window Approach, DWA)的长机-僚机(Leader-Follower)多无人机路径规划是一个复杂的任务,涉及到多个算法的组合与改进。这里我会简要介绍其原理,并提供一个基础的Matlab代码框架,但请注意,这只是一个起点,实际应用中可能需要根据具体需求进行大量的调整和优化。
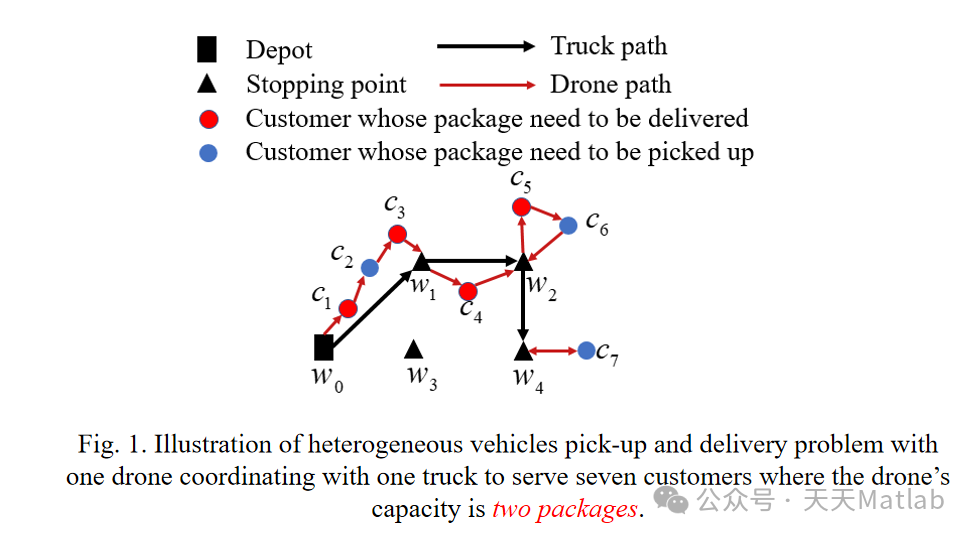
长机-僚机模式:在这种模式下,一个无人机(长机)负责规划全局路径,而其他无人机(僚机)则跟随长机并保持一定的相对位置和距离。
动态窗口法(DWA):DWA 是一种用于移动机器人的局部路径规划算法,它通过在当前速度的基础上预测一个速度窗口,并根据目标方向、障碍物距离等因素评估每个速度的优劣,从而选择最佳速度。
自适应航迹评价函数权重:评价函数的权重可以根据航迹的质量(如距离障碍物的距离、路径的平滑度等)进行自适应调整,以优化路径规划的效果。
代码框架
matlab
% 假设你已经有了一个表示无人机和障碍物位置的环境模型
% 这里只是一个示例,你需要根据自己的实际情况定义这些变量
num_drones = 3; % 无人机数量,包括一个长机和两个僚机
drone_positions = [0, 0; 5, 5; 10, 10]; % 无人机初始位置
obstacle_positi