于改进差分算法实现三维多无人机协同航迹规划的课程设计大纲的示例:
研究背景
研究背景:
随着无人机技术的快速发展,无人机在各个领域中的应用越来越广泛,如监测、搜索救援、物流等。在一些任务中,需要多个无人机进行协同工作,例如进行搜索与救援任务时,多个无人机可以协同搜索目标区域,提高效率和准确性。然而,多无人机协同航迹规划是一个具有挑战性的问题,需要考虑到多个无人机之间的碰撞避免、航迹优化和协同策略等方面。
传统的航迹规划方法往往基于预先设定的规则和路径,无法适应复杂和动态的环境。因此,强化学习成为一种有效的方法来解决多无人机协同航迹规划问题。强化学习通过智能体与环境的交互学习最优策略,具有适应性和自主性的特点。
在强化学习中,差分算法是一类常用的优化算法,尤其是改进的差分算法可以有效地优化多参数的问题。通过引入改进的差分算法,可以提高多无人机协同航迹规划的效率和性能,使得无人机能够自主地选择最优的航迹,避免碰撞和冲突,并实现有效的协同工作。
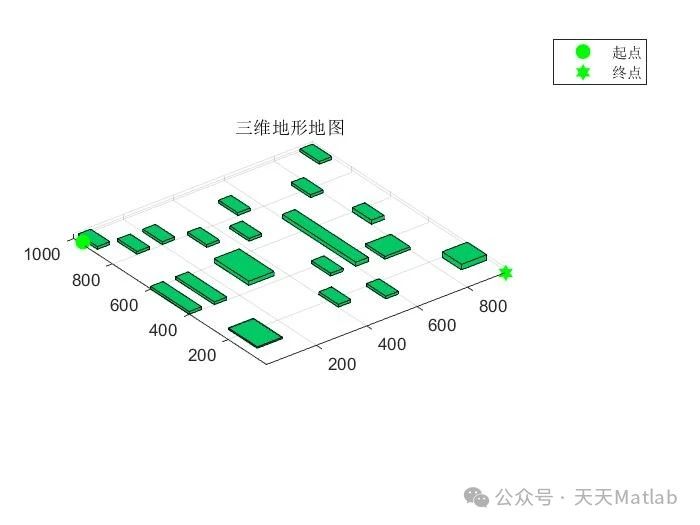
因此,本研究旨在基于改进差分算法实现三维多无人机协同航迹规划,以提高无人机协同工作的效率和安全性。通过结合强化学习和差分算法,设计合适的状态空间、动作空间和奖励函数,并实现改进差分算法,以实现多无人机的自主协同航迹规划。通过仿真实验和性能评估,验证算法的有效性和优越性,为多无人机协同应用提供可行的路径规划解决方案。
研究框架
引言
a. 介绍多无人机协同航迹规划的背景和意义
b. 简要介绍强化学习和差分算法的基本概念
c. 阐述本课程设计的目标和内容
理论基础
a. 强化学习的基本原理和算法
b. 差分


















![[Meachines][Medium]IClean](https://img-blog.csdnimg.cn/img_convert/aaffd918d0aed9bff086b15fe4b79d80.jpeg)