序言:
需要的硬件以及软件
1、USB-CAN分析仪使用顶配pro版本,带有支持ubuntu下的驱动包的,可以读取数据。
2、电源自备24V电源
3、单点激光雷达接线使用can线可以组网。
一、更改北醒单点激光雷达的id号和波特率
安装并运行USB-CAN分析仪自带的驱动软件,在windows上运行

1、首先测试信号是否通,默认ID为0x0003我下面展示的是以及改为0x0002的ID号了。




2、更改ID号和波特率

准备一个Excel表,格式如图,需要完全一样。

其中序号,系统时间,时间标识,CAN通道,传输方向,帧类型,帧格式,长度都不需要改
ID号:这里0x003是当前设备的ID号
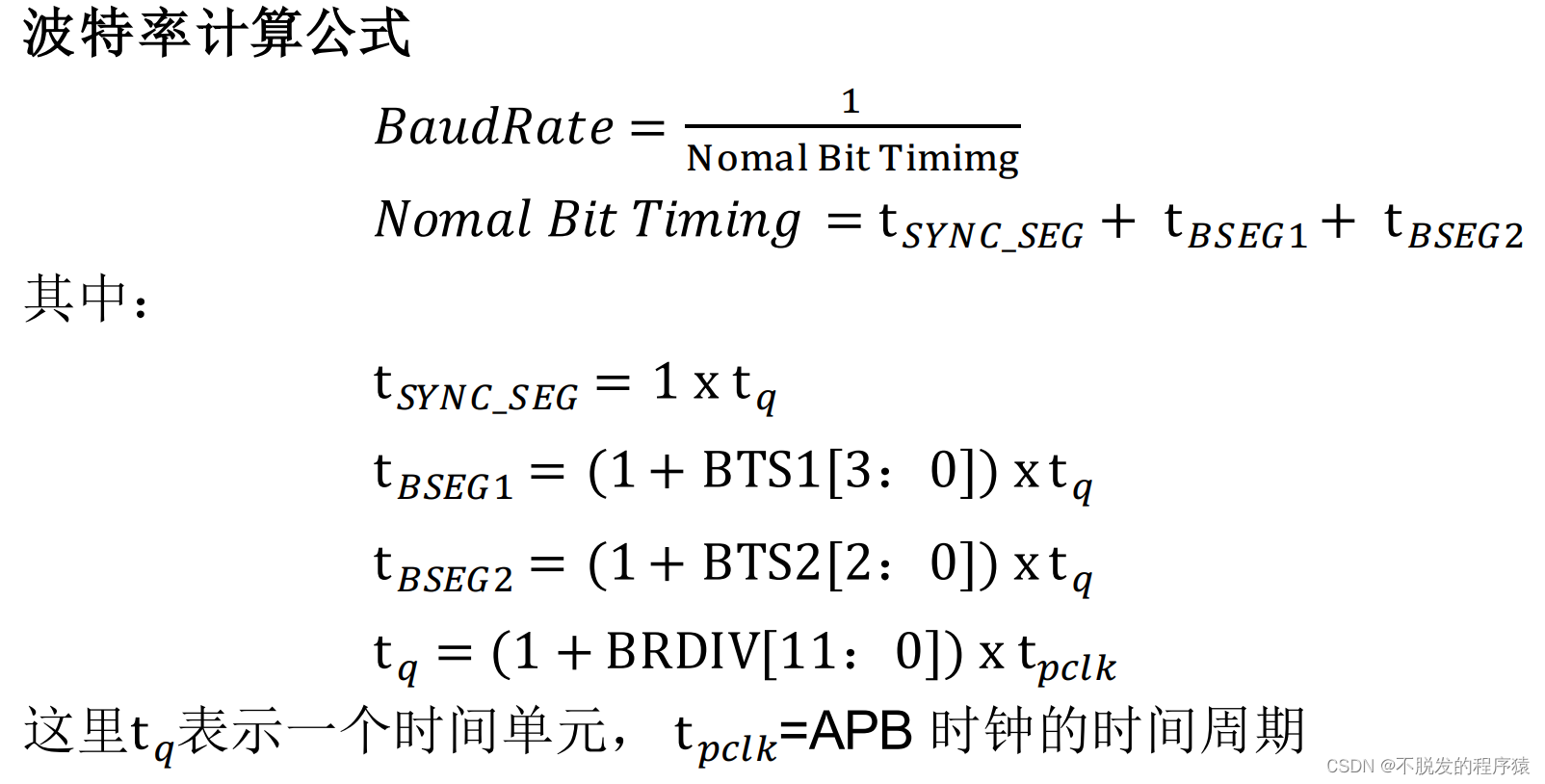
数据:数据中有3行,第一行,08代表波特率的序号代表250kbps,如果像改成500kpbs,根据表5可以看到,需要将08改成05即可。第一行中,01 00 00 和第二行中,00 01 00 00 00 表示需要改成的ID号,意思是将当前的ID号0x0003改成0x0001。
至此,只需要修改Excel里的ID号和数据里的对应数据即可完成修改ID和波特率的工作。
3、将更改的Excel文件中的内容设置到单点激光雷达设备中。
首先启动设备,点击发送文件,会出现一个对话框

点击浏览选择需要的文件

点击发送

这个界面代表以及完成更改

4、测试是否将ID由0x0002改成0x0001更改成功
重新断开电源,插拔一下usb-can设备的usb口。
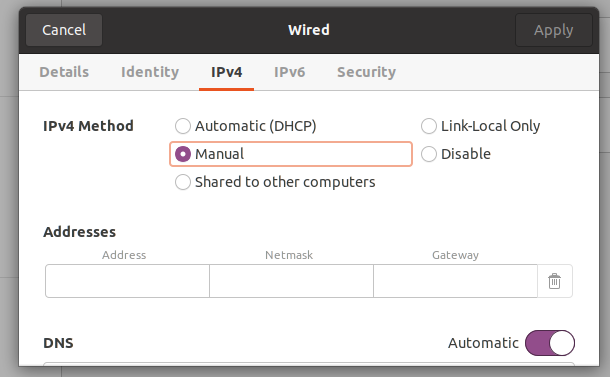
启动设备并连接。注意,如果更改了波特率,需要配置正确的波特率,如500kbps,需要打开的时候选择对应的选项。
如图红色框出显示0x0001,已经更改成功

二、ubunut20.04驱动部分
驱动部分使用的是USB-CAN的驱动,不连接USB-CAN设备,直接将设备接在CAN口,用自己开发驱动请关注后续内容。
USB-CAN驱动读取单点激光雷达数据。

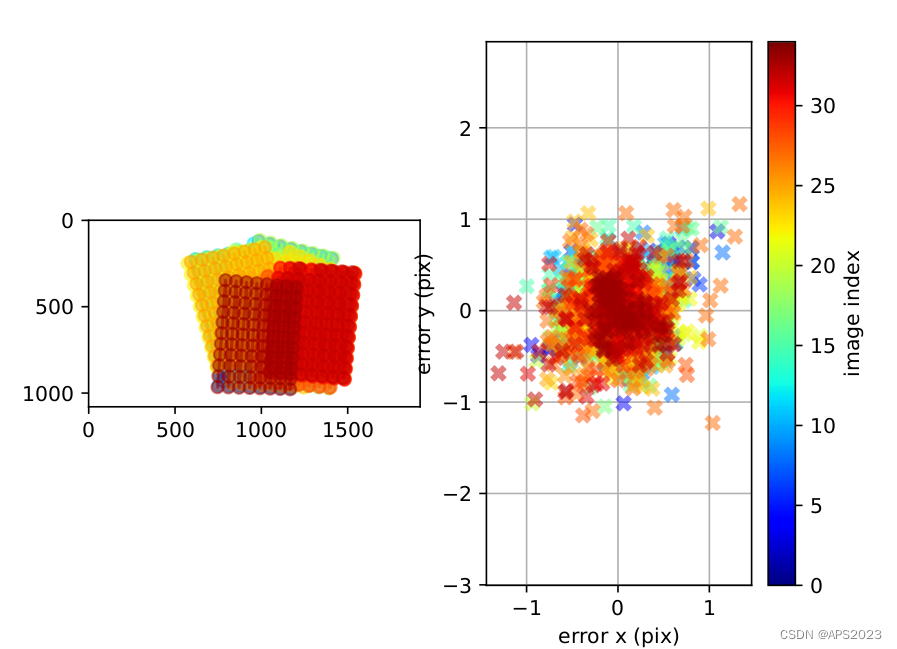
![<span style='color:red;'>激光</span><span style='color:red;'>雷达</span><span style='color:red;'>和</span>相机的联合标定工具箱[<span style='color:red;'>cam</span>_lidar_calibration]介绍](https://img-blog.csdnimg.cn/a419453dea5c47188b59fab199402c3b.png?x-oss-process=image/watermark,type_d3F5LXplbmhlaQ,shadow_50,text_Q1NETiBA5pif5YWJ5oqA5pyv5Lq6,size_20,color_FFFFFF,t_70,g_se,x_16#pic_center)






























![[PM]hm资讯平台](https://img-blog.csdnimg.cn/img_convert/e5b833938eed14fe3a1e26017bd6ad80.png)

![[SUCTF 2019]EasySQL1](https://i-blog.csdnimg.cn/direct/daf11b41331441c7876d84b6ae96814b.png)