机体坐标系(Body Frame)和导航坐标系(Navigation Frame)是惯性导航系统(INS)中常用的两个坐标系,用于描述物体的姿态、速度和位置。下面通过具体例子来说明这两个坐标系的含义和区别。
机体坐标系(Body Frame)
机体坐标系是固定在运动物体上的坐标系。通常情况下,定义如下:
- X轴:沿着机体的前方(向前)。
- Y轴:沿着机体的右侧(向右)。
- Z轴:沿着机体的下方(向下)。
例子:无人机的机体坐标系
对于一架无人机,机体坐标系可以这样定义:
X轴:指向无人机的前方。
Y轴:指向无人机的右侧。
Z轴:指向无人机的下方。(高度)
在这个坐标系中,无人机的加速度、角速度和其他传感器数据都是相对于机体本身的方向进行测量的。
导航坐标系(Navigation Frame)
导航坐标系是固定在地面或惯性空间的坐标系,用于描述物体在全局坐标中的位置和运动状态。通常情况下,定义如下:
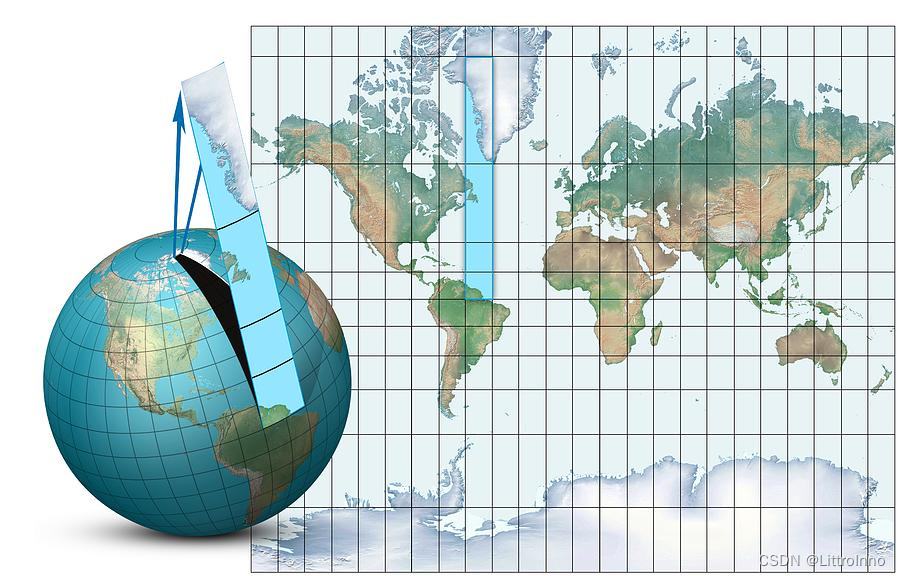
- X轴:指向北方(N)。 (刻度表示地球维度)
- Y轴:指向东方(E)。 (刻度表示地球经度)
- Z轴:指向地心(D)(对于NEU坐标系,Z轴指向天顶(U))。
例子:地球固定的导航坐标系
对于一架无人机在地球表面飞行时,导航坐标系可以这样定义:
X轴:指向地理北极。
Y轴:指向地理东。
Z轴:指向地心(对于NED坐标系)。
在这个坐标系中,无人机的位置信息、速度信息都是相对于地球固定坐标系来描述的。
具体例子说明
假设我们有一架无人机正在飞行,我们需要描述其当前的姿态和运动状态。
机体坐标系描述
在无人机的机体坐标系中,我们测量得到以下数据:
- 加速度: a b = [ 0.1 , 0.2 , − 9.7 ] m / s 2 \mathbf{a}_b=[0.1,0.2,-9.7] \mathrm{m} / \mathrm{s}^2 ab=[0.1,0.2,−9.7]m/s2
- 角速度:” ω b = [ 0.01 , 0.02 , 0.03 ] r a d / s \boldsymbol{\omega}_b=[0.01,0.02,0.03] \mathrm{rad} / \mathrm{s} ωb=[0.01,0.02,0.03]rad/s
文些数据表示在机体坐标系中,无人机前方有 0.1 m / s 2 0.1 \mathrm{~m} / \mathrm{s}^2 0.1 m/s2 的加速度,右侧有 0.2 m / s 2 0.2 \mathrm{~m} / \mathrm{s}^2 0.2 m/s2 的加速度,下方有 9.7 m / s 2 9.7 \mathrm{~m} / \mathrm{s}^2 9.7 m/s2 的加速度(由于重力作用)。角速度表示绕前方轴 0.01 r a d / s 0.01 \mathrm{rad} / \mathrm{s} 0.01rad/s ,绕右侧轴 0.02 r a d / s 0.02 \mathrm{rad} / \mathrm{s} 0.02rad/s ,绕下方由 0.03 r a d / s 0.03 \mathrm{rad} / \mathrm{s} 0.03rad/s 的旋转。
导航坐标系描述
通过惯性导航算法,我们可以将上述机体坐标系中的数据转换到导航坐标系中。例如,转换后的加速度和角速度在导航坐标系中表示为:
- 加速度: a n = [ 0.1 , 0.0 , − 9.8 ] \mathbf{a}_n=[0.1,0.0,-9.8] an=[0.1,0.0,−9.8] m/s2
- 角速度: ω n = [ 0.0 , 0.02 , 0.03 ] \boldsymbol{\omega}_n=[0.0,0.02,0.03] ωn=[0.0,0.02,0.03] rad/s
这些数据表示在导航坐标系中,无人机向北有 0.1 m / s 2 0.1 \mathrm{~m} / \mathrm{s}^2 0.1 m/s2 的加速度,向东没有加速度,向地心有 9.8 m / s 2 9.8 \mathrm{~m} / \mathrm{s}^2 9.8 m/s2 的加速度 (主要是重力)。角速度表示绕北轴没有旋转,绕东轴 0.02 r a d / s 0.02 \mathrm{rad} / \mathrm{s} 0.02rad/s 的旋转,绕地心轴 0.03 r a d / s 0.03 \mathrm{rad} / \mathrm{s} 0.03rad/s 的旋转。
总结
机体坐标系:固定在无人机上的坐标系,用于描述相对于机体的运动和姿态。
导航坐标系:固定在地球上的坐标系,用于描述无人机在全局中的位置和运动状态。
两者之间的转换依赖于姿态估计(例如使用方向余弦矩阵或四元数),从而将机体坐标系中的测量值转换到导航坐标系中进行导航和控制。