本文介绍RTOS中断与任务的同步。
RTOS使用过程中,经常会涉及中断和任务的交互即同步。通常会涉及到到信号量,事件集,消息队列等系统组件。本文介绍事件集的基础知识,并给出一个范例。
1.基础知识
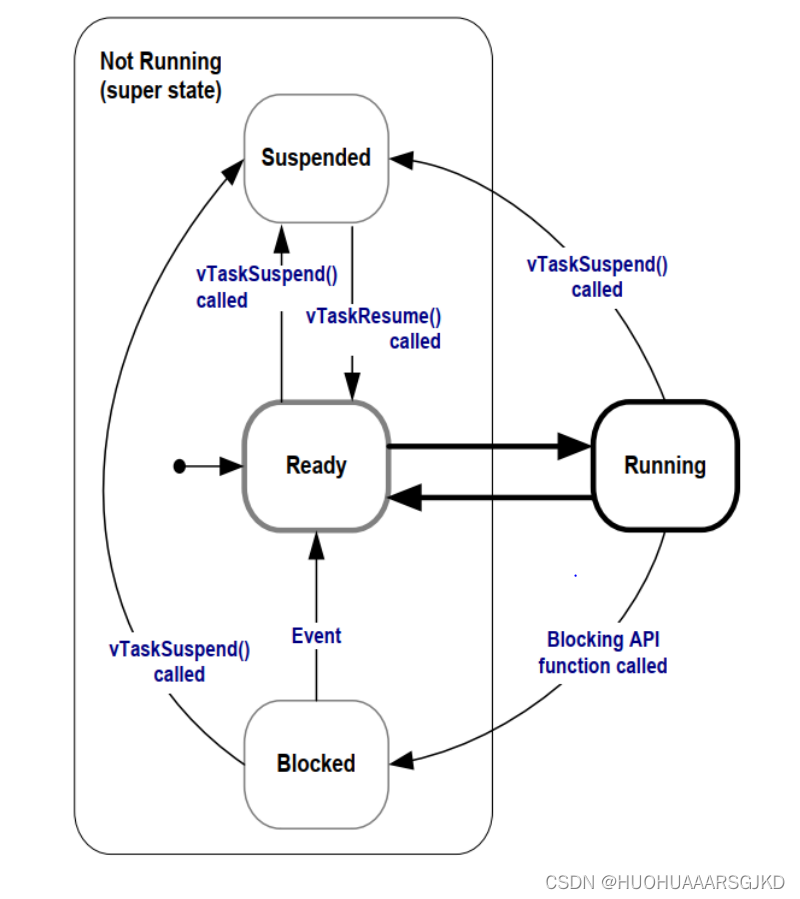
RTOS为了保证运行实时性,给予任务不同的优先级,任何时候都保证处于最高优先级的任务处于运行状态,而中断独立于任务而存在,具有超越所有任务的优先级,它的正确处理非常关键。
1)概念
中断与任务的同步,简而言之,就是中断和任务的通信。需要特别注意的是,退出中断后要保证就绪列表中处于最高优先级的任务得以执行,因为在中断服务程序中可能唤醒比原任务(进入中断前)优先级高的任务。
中断和任务之间同步常用的组件包括信号量,事件集,消息队列。注意,在中断中只能发送这些组件,不能阻塞在这些组件上。
2)主要接口
这里以CMSIS-RTOS2通用API来介绍常用接口,以信号量为例,其他组件类似。
a)创建:
osSemaphoreId_t osSemaphoreNew(uint32_t max_count,
uint32_t initial_count,
const osSemaphoreAttr_t *attr
)b)获取:
osStatus_t osSemaphoreAcquire(osSemaphoreId_t semaphore_id,
uint32_t timeout
)c)释放:
osStatus_t osSemaphoreRelease(osSemaphoreId_t semaphore_id)注意:
a)在中断中可以调用信号量获取,但不能调用信号量释放。
b)释放信号量会引发一次上下文切换(中断中也一样),以确保最高优先级任务得以执行。
2.范例
这里以一个信号量的使用为范例描述中断和任务的同步。
1)中断服务程序
中断服务程序释放信号量(这里的信号量为2进制信号量),参考伪代码如下:
void ISR(void)
{
osSemaphoreRelease(sem_id);
//Other user code
...
}注意:
这里的释放信号量会引发一次上下文切换(选取最高优先级任务),待中断返回后会执行最高优先级任务(假设不存在中断嵌套或更高优先级抢占)。
2)任务
任务阻塞在信号量上,中断服务程序一旦释放信号量,若当前优先级最高,则中断返回后即会执行此任务代码。参考伪代码如下:
osSemaphoreId_t sem_id;
void InitSem(void)
{
sem_id = osSemaphoreNew(1U, 0U, NULL);
}
void TestThread(void *argument)
{
(void)argument;
while (1)
{
osSemaphoreAcquire(sem_id, osWaitForever);
//Function
}
}注意:
这里将信号量初始化为最大值为1,初始值为0。
总结,本文介绍了RTOS中断与任务的同步。