一 任务控制块(TCB,Task Control Block)基本个概念:
TCB是RTOS(实时操作系统)中的一个核心概念,它是一个数据结构,主要用于记录和管理任务的相关信息。每个已创建的任务在RTOS中都有一个与之对应的任务控制块,可以理解为任务的“身份证”。
任务控制块中包含了很多成员变量,这些变量详细记录了任务的属性,如任务的堆栈栈顶指针、指向下一个任务控制块的指针、任务等待的延迟时间、任务的当前状态标志、任务的优先级别等。这些属性与任务管理密切相关,是系统调度任务和进行任务切换的重要依据。
任务控制块的作用在于提供一个集中的地方来存储任务的所有相关信息,使得系统可以方便地对任务进行操作和管理。通过任务控制块,系统可以创建任务、设置任务的属性、删除任务,以及进行任务的调度和切换。因此,任务控制块是RTOS中任务管理的核心数据,其正确性和完整性对于系统的正常运行至关重要。
在FreeRTOS这样的RTOS中,任务控制块的具体实现可能会根据硬件配置和应用需求有所不同。但总的来说,任务控制块都是实现多任务并发执行、任务切换和任务管理的重要机制。
需要注意的是,由于任务控制块涉及系统内部的核心数据,通常不应当将其直接暴露给用户程序,以防止误操作导致系统崩溃。在使用RTOS进行开发时,开发者应当遵循相应的编程规范和最佳实践,以确保系统的稳定性和可靠性。
二 TCB包含的关键信息
RTOS(实时操作系统)的任务控制块(Task Control Block,TCB)是一个至关重要的数据结构,用于管理和维护系统中的每一个任务。TCB存储了任务的所有相关信息,当任务在RTOS中被创建、调度、执行以及销毁时,系统都会通过操作TCB来进行管理。以下是TCB通常包含的关键信息及其作用:
1. **任务ID**:唯一标识符,用于在整个系统中区分不同任务。
2. **任务堆栈指针**:指向任务的堆栈区域,用于保存任务执行过程中的局部变量、函数参数、返回地址以及CPU寄存器状态等。
3. **任务堆栈大小**:记录任务堆栈容量,确保在任务执行过程中不会溢出。
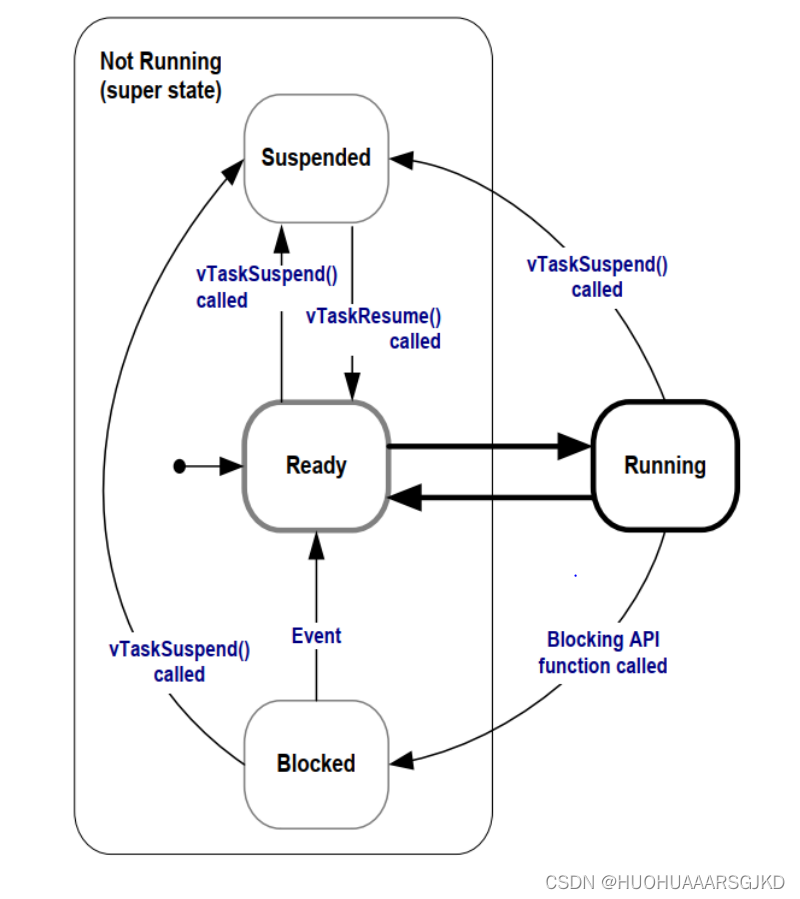
4. **任务状态**:记录任务当前所处的状态,比如就绪态、运行态、挂起态、等待态(可能因等待某个事件、信号量、互斥锁等原因)。
5. **任务优先级**:每个任务都具有一个优先级,用于在调度时确定哪个任务应该得到CPU使用权。
6. **任务入口地址**:当任务开始执行或恢复执行时,程序计数器(PC)需要被设置为此地址,指示任务从何处开始执行。
7. **事件标志/等待列表**:任务可能在等待某种事件发生,TCB中会记录任务正在等待什么资源,例如信号量、消息队列、定时器到期等。
8. **任务资源列表**:记录任务占用或关联的系统资源,如文件描述符、硬件设备句柄等。
9. **延时计数器**:如果任务处于延时等待状态,TCB中会有计数器记录剩余等待时间。
**示例说明:**
假设有以下简单的RTOS系统,其中包含两个任务(Task1和Task2),它们各自拥有一个TCB:
typedef struct {
uint32_t taskId;
void* stackPointer;
size_t stackSize;
enum TaskState { READY, RUNNING, BLOCKED, SUSPENDED } state;
uint8_t priority;
void (*taskEntryPoint)(void*);
void* waitResource;
uint32_t delayCounter;
// 其他可能的字段...
} TCB;
TCB task1TCB;
TCB task2TCB;
void task1_handler(void*) {
// ...任务1的执行代码...
}
void task2_handler(void*) {
// ...任务2的执行代码...
}
void initRTOS() {
task1TCB.taskId = 1;
task1TCB.stackPointer = malloc(STACK_SIZE);
task1TCB.stackSize = STACK_SIZE;
task1TCB.state = READY;
task1TCB.priority = HIGH_PRIORITY;
task1TCB.taskEntryPoint = task1_handler;
task1TCB.waitResource = NULL;
// 初始化其他字段...
task2TCB.taskId = 2;
// 类似地初始化task2TCB...
// 创建并启动任务
createTask(&task1TCB);
createTask(&task2TCB);
}
void scheduleTasks() {
// RTOS调度器根据TCB中的信息选择下一个要执行的任务
// ...
}
在调度时,RTOS会根据任务优先级、状态等因素,从就绪队列中选择最高优先级的任务,取出其TCB中的信息,恢复任务的CPU上下文(从stackPointer加载寄存器),并开始执行任务的代码。当任务等待资源或主动放弃CPU时,RTS会保存当前任务的CPU上下文到其TCB中,并选择下一个就绪任务继续执行。
三 任务切换场景(一):
当前任务被阻塞然后切换至其他任务,后续当前任务就绪并切换回来场景实例:
需要使用某种RTOS的API来模拟这些操作。由于不同的RTOS有不同的API和语法,使用一个假设的RTOS API来编写这个示例。请注意,这个示例仅用于说明目的,并不针对任何特定的RTOS实现。
假设我们有一个RTOS,它提供了以下API:
RTOS_TaskCreate():创建任务。RTOS_TaskSuspend():挂起(阻塞)任务。RTOS_TaskResume():恢复(解除阻塞)任务。RTOS_TaskSwitch():手动切换任务(通常RTOS会自动调度任务,但为了这个示例,我们假设有这样的API)。RTOS_Delay():任务延时,模拟任务执行一段时间。
下面是使用这些API的示例代码:
c复制代码
#include <rtos.h> // 假设RTOS的头文件是rtos.h |
|
// 任务函数1 |
|
void Task1(void *arg) { |
|
while (1) { |
|
// 执行一些任务1的工作 |
|
// ... |
|
// 假设任务1需要等待某个事件,因此请求阻塞 |
|
RTOS_TaskSuspend(RTOS_GetCurrentTaskHandle()); // 阻塞当前任务 |
|
// 当任务1被唤醒(解除阻塞)后,继续执行 |
|
// ... |
|
// 延时一段时间 |
|
RTOS_Delay(100); // 模拟任务执行一段时间 |
|
} |
|
} |
|
// 任务函数2 |
|
void Task2(void *arg) { |
|
while (1) { |
|
// 执行一些任务2的工作 |
|
// ... |
|
// 延时一段时间 |
|
RTOS_Delay(200); // 模拟任务执行一段时间 |
|
// 在某个时刻,唤醒任务1(假设有某种条件满足) |
|
RTOS_TaskResume(task1_handle); // 假设task1_handle是任务1的句柄 |
|
} |
|
} |
|
int main() { |
|
RTOS_Handle task1_handle, task2_handle; |
|
// 初始化RTOS系统 |
|
RTOS_Init(); |
|
// 创建任务1 |
|
RTOS_TaskCreate(&task1_handle, "Task1", Task1, NULL, STACK_SIZE_TASK1, PRIORITY_TASK1); |
|
// 创建任务2 |
|
RTOS_TaskCreate(&task2_handle, "Task2", Task2, NULL, STACK_SIZE_TASK2, PRIORITY_TASK2); |
|
// 启动RTOS调度器 |
|
RTOS_Start(); |
|
// 主函数通常不会返回,RTOS系统通过任务来执行工作 |
|
while (1) { |
|
// 在某些RTOS中,主函数可能需要一个无限循环来防止退出 |
|
} |
|
return 0; // 通常不会执行到这里 |
|
} |
在这个例子中:
Task1函数模拟了一个任务,它执行一些工作,然后请求阻塞自身。当它被唤醒后,它会继续执行。Task2函数是另一个任务,它执行一些工作,并在某个时刻唤醒Task1。main函数初始化RTOS系统,创建任务,并启动RTOS调度器。
需要注意的是,这个示例中的API(如RTOS_TaskSuspend、RTOS_TaskResume和RTOS_TaskSwitch)是假设的,并且不同的RTOS实现会有不同的API和机制来处理任务阻塞、唤醒和调度。在实际使用时,你需要参考你所使用的RTOS的文档来了解正确的API和用法。
此外,大多数RTOS会自动管理任务调度和上下文切换,而不需要手动调用如RTOS_TaskSwitch这样的函数。这里的示例主要是为了展示任务阻塞、唤醒和切换的概念。
四 任务切换场景(四)
任务切走,怎么切回来:
在实时操作系统(RTOS)中,当一个任务(Task)被抢占或者自愿让出CPU使用权后,要想切回原来的任务,通常需要经历以下过程:
1. **上下文切换(Context Switch)**:
- 当前任务在被切换前,RTOS会保存当前任务的上下文,包括CPU寄存器状态(如程序计数器PC、栈指针SP等)和其他与任务执行状态相关的数据,这些信息会被保存到当前任务的堆栈或者任务控制块(TCB)中。
- 然后,RTOS会根据调度算法选择一个新的任务来执行,新任务的上下文会被恢复到CPU寄存器中。
2. **任务恢复**:
- 当之前被切走的任务由于其优先级提高、等待的事件发生(如信号量释放、定时器到期等)或者之前的阻塞原因解除而变为可执行状态时,RTOS调度器会发现该任务已经准备好执行。
- 在下一次调度机会时,调度器会选择这个任务来执行,并从其TCB中恢复之前保存的上下文信息,从而使CPU能够从任务被切走的地方继续执行。
例如,在FreeRTOS中,当一个任务被中断、另一个高优先级任务抢占或者调用yield函数让出CPU时,会发生上下文切换。当原先的任务再次被调度时,通过`vTaskSwitchContext()`函数调用的内部机制,会调用如`portRESTORE_CONTEXT()`这样的函数恢复任务的上下文,从而使得任务得以继续执行。
总结来说,任务切回执行的过程是由RTOS的调度器根据调度策略自动完成的,并且涉及到上下文的保存与恢复操作。在没有更多阻塞条件的情况下,先前被切走的任务会在适当时候通过调度机制自然地切回执行。
五 RTOS如何知道任务被阻塞
RTOS(实时操作系统)通过一系列机制来知道任务何时被阻塞。这些机制确保了RTOS能够正确地管理任务的状态和调度其他任务来执行。以下是RTOS如何知道任务被阻塞的基本过程:
任务发起阻塞请求:任务通过调用RTOS提供的API或机制来请求阻塞。例如,任务可能会调用一个函数来等待信号量、消息队列中的消息、定时器到期或其他同步原语。这些调用向RTOS表明了任务需要等待某个条件满足或某个事件发生才能继续执行。
RTOS处理阻塞请求:当RTOS接收到任务的阻塞请求时,它会检查请求的有效性,并更新任务的状态。任务的状态会从就绪状态或运行状态变更为阻塞状态。RTOS还会保存任务当前的上下文信息,包括程序计数器、堆栈指针和其他寄存器的值,以便在任务解除阻塞时能够恢复其执行状态。
任务添加到阻塞队列:RTOS通常维护一个或多个阻塞队列或等待列表,用于跟踪当前处于阻塞状态的任务。一旦任务被标记为阻塞状态,RTOS会将其添加到相应的阻塞队列中。这样,当导致任务阻塞的条件满足时,RTOS可以轻松地找到并唤醒这些任务。
条件满足时唤醒任务:当导致任务阻塞的条件满足时(例如,信号量被释放、消息队列中有消息可用、定时器到期等),RTOS会检查阻塞队列,找到对应的任务,并将其从阻塞队列中移除。然后,RTOS会将任务的状态从阻塞状态变更为就绪状态,并将其重新添加到就绪队列中,以便在适当的时机进行调度执行。
RTOS调度其他任务:在任务被阻塞后,RTOS会检查任务优先级队列,寻找下一个最高优先级的就绪任务进行调度。这涉及到从优先级队列中取出任务控制块(TCB),加载该任务的上下文到CPU中,并使其开始执行。通过这种方式,RTOS确保了系统的实时响应能力,即使某些任务处于阻塞状态。
通过上述机制,RTOS能够知道任务何时被阻塞,并相应地管理任务的状态和调度其他任务来执行。这些机制确保了RTOS能够高效地处理多任务环境,并提供实时性能。需要注意的是,具体的实现细节可能因不同的RTOS而有所不同,因此在实际使用时,需要参考所使用RTOS的文档来了解其具体的阻塞和任务管理机制。