MIT人形机器人基于开发改进的执行器全新设计,通过可感知执行器运动动力学移动规划器(Actuator-Aware Kino-Dynamic Motion Planner)及着地控制器(Landing Controller)等实现机器人的运动控制。
机器人设计
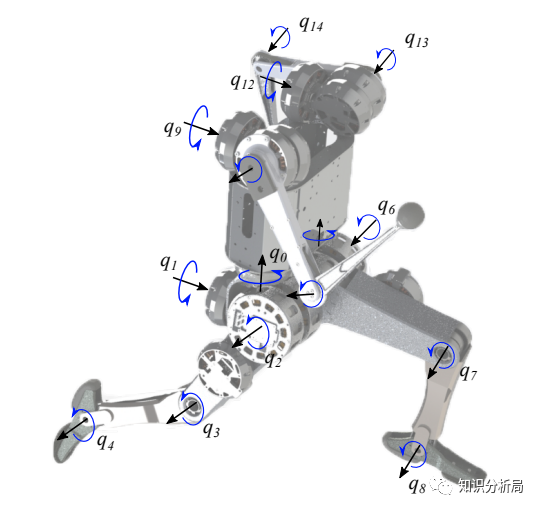
机器人高0.7米,21KG(四肢重量 25%),双腿各5个执行器(Actuators),膝、踝、肘关节带减速器(增强力矩),两脚各4个连接感知器,电池(60V,3Ah)。
规划控制
机器人规划控制框架。
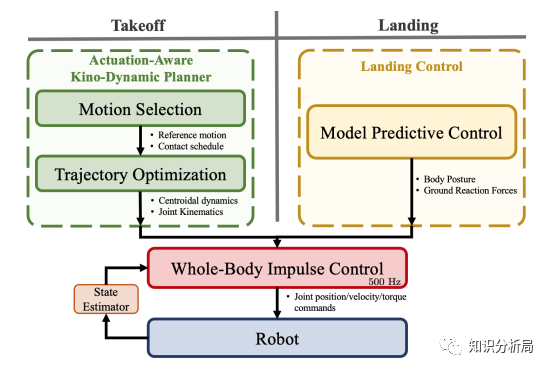
运动分为三个阶段,离地(Takeoff),腾空(Flight),着地(Landing)。
离地阶段,基于质心动力学模型(Centroidal Dynamics Model),通过可感知执行器运动动力学规划器(AAKD,Actuation-Aware Kino-Dynamic Planner)进行规划,整体脉冲控制器(WBIC)实现规划的移动。
规划基于移动选择器(Motion Selector)通过对地形、任务等信息评估选择需要的移动方式(跳、空翻等),再通过机器人质心动力学轨迹优化计算实现相应的移动方式的轨迹。
腾空阶段,通过比例控制器(PD)控制器控制机器人关节以适应可感知执行器运动动力学规划器(AAKD)的规划。
着地阶段,基于集中质量模型(Lumped Mass Model),通过基于二次规划算法的模型预测控制器(MPC)规划机器人连接点反作用力,整体脉冲控制器(WBIC)实现规划的移动。
一、运动动力学规划
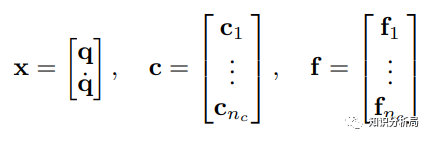
机器人运动动力学优化变量:

x,机器人位置、速度向量。r,机器人质心位置。h,机器人质心角动量( CAM,Centroidal Angular Momentum)。c,机器人连接点位置。f,机器人连接点反作用力。
最优目标函数:
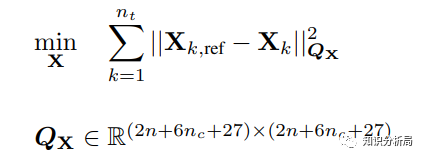
Qx,权重矩阵。计算最接近移动选择器(Motion Selector)定义的参考移动量(Xref)的运动动力信息。
质心动力学约束:
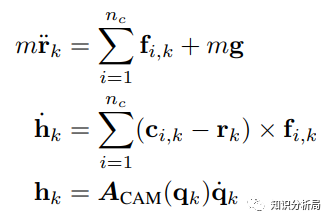
关节运动学与质心动力学一致性约束:

与环境存在连接点的肢部约束:
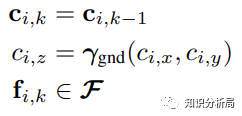
与环境不存在连接点的肢部约束:
![]()
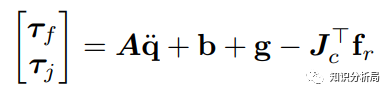
关节力矩等式:

计算机器人不同时刻移动时需要设置的关节力矩。
二、着地模型预测控制(Landing Model-Predictive Control)
机器人状态方程:

最优目标函数:

计算使机器人状态最接近预定状态的反作用力。
三、整体脉冲控制任务配置
人形机器人的整体脉冲控制(WBIC)原理与四足机器人基本相似。
着地控制(Landing Control)过程中,由于MIT人形机器人质量集中在主体部分,可将模型预测控制(MPC)的集中质量模型主体方向看作机器人主体方向;将机器人主体方向选作第一任务,基于该任务定义机器人质心动量(Centroidal Momentum)任务、计算零空间投影。
MIT人形机器人运动控制原理与MIT四足机器人相似,同时通过质量集中设计,开发更大力矩的执行器实现各类跳跃动作。
参考:
The MIT Humanoid Robot: Design, Motion Planning, and Control For Acrobatic Behaviors.
附赠
【一】上千篇CVPR、ICCV顶会论文
【二】动手学习深度学习、花书、西瓜书等AI必读书籍
【三】机器学习算法+深度学习神经网络基础教程
【四】OpenCV、Pytorch、YOLO等主流框架算法实战教程
➤ 在助理处自取:

➤ 还可咨询论文辅导❤【毕业论文、SCI、CCF、中文核心、El会议】评职称、研博升学、本升海外学府!



![[<span style='color:red;'>机器人</span>-3]:开源<span style='color:red;'>MIT</span> <span style='color:red;'>Min</span> cheetah机械狗设计(三):嵌入式硬件设计](https://img-blog.csdnimg.cn/img_convert/6e5efb759439951b2c172d4a9d372af7.webp?x-oss-process=image/format,png)
![[<span style='color:red;'>机器人</span>-1]:开源<span style='color:red;'>MIT</span> <span style='color:red;'>Min</span> cheetah机械狗设计(一):系统方案及硬件解析](https://img-blog.csdnimg.cn/img_convert/b26fc43e28d763680746caea29d9e201.webp?x-oss-process=image/format,png)
![[<span style='color:red;'>机器人</span>-2]:开源<span style='color:red;'>MIT</span> <span style='color:red;'>Min</span> cheetah机械狗设计(二):机械结构设计](https://img-blog.csdnimg.cn/img_convert/a049ab5962d9c072a6574f1e1c7d4e2e.webp?x-oss-process=image/format,png)