人形机器人强化学习控制
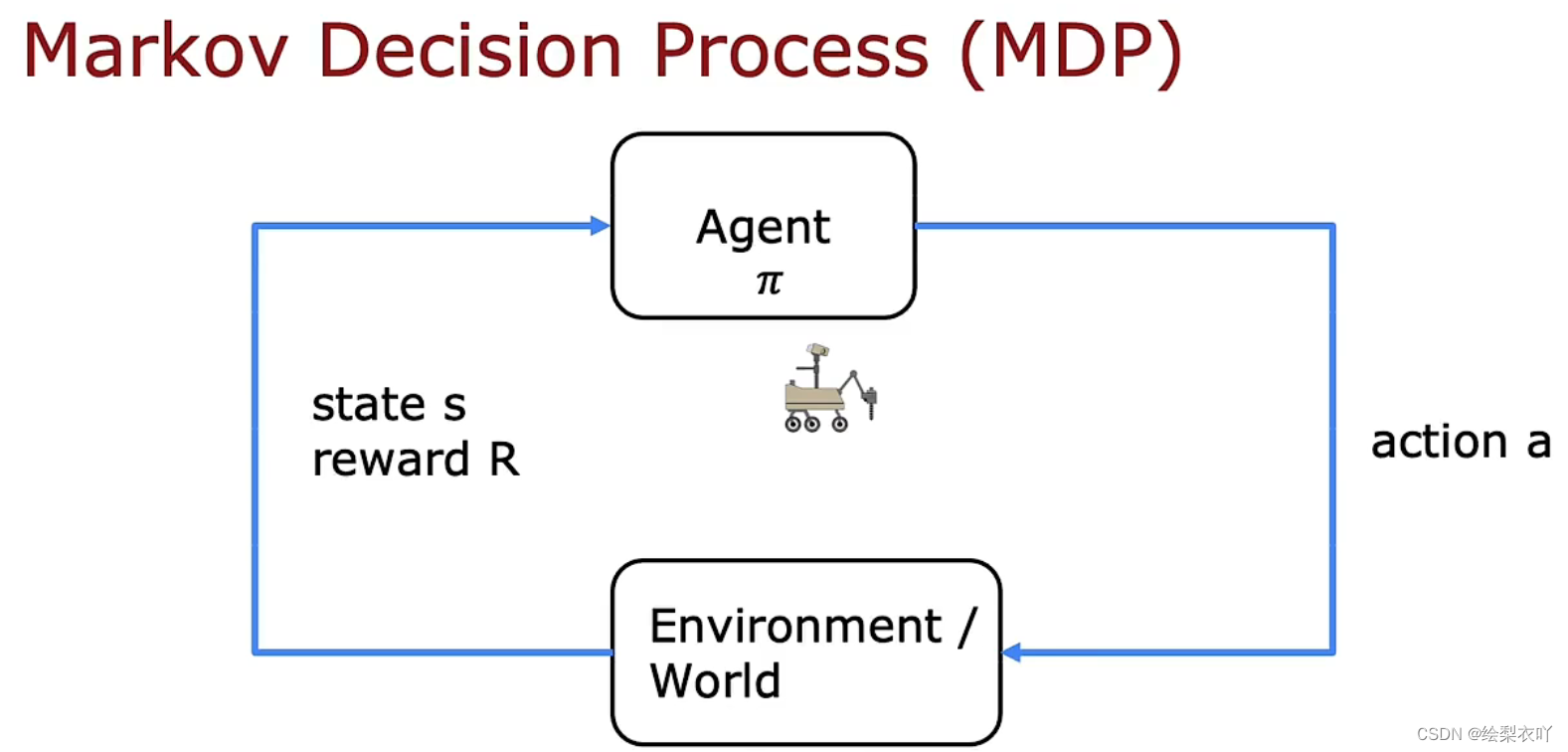
人形机器人(Humanoid Robot)的控制是机器人学中的一个重要研究方向,其中强化学习(Reinforcement Learning, RL)技术近年来得到了广泛的应用。以下是几个典型的案例,展示了如何使用强化学习技术来实现人形机器人的控制:
1、深度强化学习控制人形机器人行走:
- 案例概述:
利用深度强化学习(Deep Reinforcement Learning, DRL)技术来训练人形机器人实现稳定行走。通过模拟环境中不断尝试与调整,机器人能够学习到在不同地形上行走的方法。 - 具体方法:
使用深度Q网络(Deep Q-Network, DQN)或策略梯度(Policy Gradient)算法,如PPO(Proximal Policy Optimization)或DDPG(Deep Deterministic Policy Gradient)。通过不断采样环境状态、动作与奖励来更新模型参数。 - 案例应用:
Google DeepMind在2016年利用DRL技术成功地训练了一个能够在多种地形上行走的虚拟人形机器人。
2、基于模仿学习与强化学习的人形机器人运动控制:
- 案例概述:
结合模仿学习(Imitation Learning)和强化学习,使人形机器人能够学习复杂的运动技能,如跑步、跳跃或体操动作。 - 具体方法:
通过模仿人类或其他机器人的动作数据(如MoCap数据),机器人首先学会基础的动作模式,然后通过强化学习来进行细化与优化,以适应实际环境。 - 案例应用:
OpenAI的研究团队利用这种方法训练了一个能够完成体操动作的虚拟人形机器人。
3、多任务学习与迁移学习在人形机器人中的应用:
- 案例概述:
通过多任务学习(Multi-Task Learning)和迁移学习(Transfer Learning)技术,使人形机器人能够在学习一种任务(如走路)之后,更快速地学习其他相关任务(如跑步或上下楼梯)。 - 具体方法:
在共享的模型基础上训练多个相关任务,通过任务间的共享与迁移来提升整体学习效率与性能。 - 案例应用:
DeepMind的研究展示了如何通过多任务学习与迁移学习,使机器人在不同任务间共享知识,从而更高效地学习新技能。
4、基于模型的强化学习控制人形机器人
- 案例概述:
利用基于模型的强化学习(Model-Based Reinforcement Learning),通过学习环境的动力学模型来进行预测与规划,使人形机器人能够更加高效地进行动作控制。 - 具体方法:
建立机器人与环境的物理模型,通过预测未来状态与奖励来优化控制策略,如使用MBPO(Model-Based Policy Optimization)算法。 - 案例应用:
MIT的机器人实验室利用基于模型的强化学习,实现了人形机器人在未知环境中的高效运动规划与控制