auto odom_msg = Odom;
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = odom_msg.header.stamp;
odom_trans.header.frame_id = odom_msg.header.frame_id;
odom_trans.child_frame_id = odom_msg.child_frame_id;
odom_trans.transform.translation.x = odom_msg.pose.pose.position.x;
odom_trans.transform.translation.y = odom_msg.pose.pose.position.y;
odom_trans.transform.translation.z = odom_msg.pose.pose.position.z;
odom_trans.transform.rotation.x = odom_msg.pose.pose.orientation.x;
odom_trans.transform.rotation.y = odom_msg.pose.pose.orientation.y;
odom_trans.transform.rotation.z = odom_msg.pose.pose.orientation.z;
odom_trans.transform.rotation.w = odom_msg.pose.pose.orientation.w;
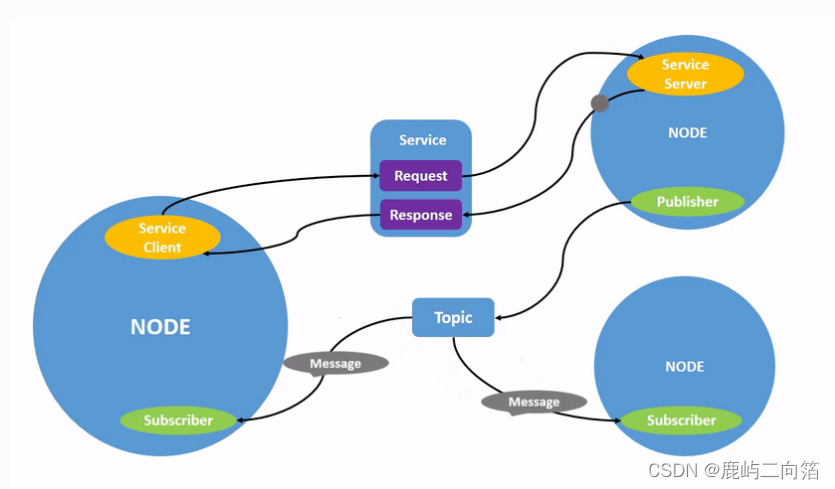
tf_broadcaster_.sendTransform(odom_trans);片段来自于一个使用ROS(机器人操作系统)的应用程序,主要功能是将来自Odom消息的数据转换为一个geometry_msgs::TransformStamped类型的消息,并通过一个TF广播器(tf_broadcaster_)发布这个转换信息。TF是ROS中的一个坐标变换框架,用于在不同坐标系间进行转换。下面是代码的具体解释:
初始化变量:首先,创建了一个名为
odom_msg的自动类型推导变量,它应该是接收来自Odometry话题的消息,尽管这里直接用了Odom,实际上应该是一个Odometry类型的变量实例。创建TransformStamped消息:然后,创建了一个
geometry_msgs::TransformStamped类型的odom_trans变量,该类型用于存储坐标变换信息,包括时间戳、参考坐标系ID、子坐标系ID以及实际的平移和旋转信息。填充TransformStamped消息内容:
header.stamp:设置转换的时间戳与odom_msg的消息时间戳相同。header.frame_id:设置转换的参考坐标系ID与odom_msg的参考坐标系ID相同。child_frame_id:设置子坐标系ID,同样取自odom_msg。- 平移部分(
translation):从odom_msg.pose.pose.position中分别取出x、y、z坐标值,填充到转换的平移部分。 - 旋转部分(
rotation):从odom_msg.pose.pose.orientation中分别取出x、y、z、w四个四元数分量,用于表示旋转信息。
发送转换信息:最后,通过调用
tf_broadcaster_.sendTransform(odom_trans)方法,将构造好的坐标变换信息发布出去,这样其他节点就可以通过TF系统查询或使用这个坐标变换数据了。
这段代码常用于机器人导航或者任何需要在不同坐标系间转换数据的场景,比如将里程计(Odometry)数据转换到世界坐标系或其他特定坐标系下。