目录
在本文作者的文章中:细说ARM MCU的串口发送数据的实现过程-CSDN博客 https://wenchm.blog.csdn.net/article/details/139598451
串口每接收到1字节的数据,就调用一次回调函数。实际上,可以通过修改参数,在接收了一定长度的数据之后再调用回调函数。下面尝试当串口接收到3字节数据后再调用一次回调函数。
1、硬件及工程
文章依赖的硬件及工程配置同本文作者的其他文章:细说ARM MCU的串口接收数据的实现过程-CSDN博客 https://wenchm.blog.csdn.net/article/details/139541112
2、实现方法
为此,需要将HAL_UART_Receive_IT()函数中的Size参数设置为3,也就是把在main.h中声明的RXBUFFERSIZE修改为3,可以直接在main.h中修改。
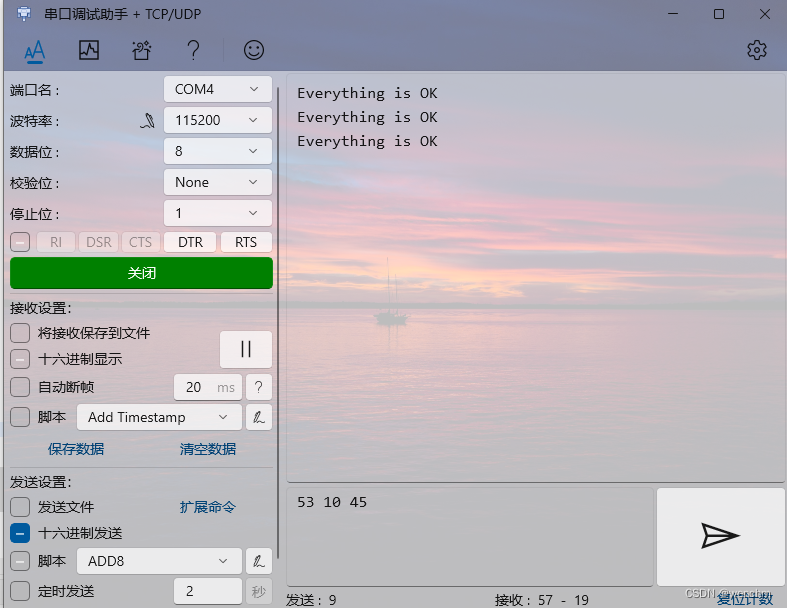
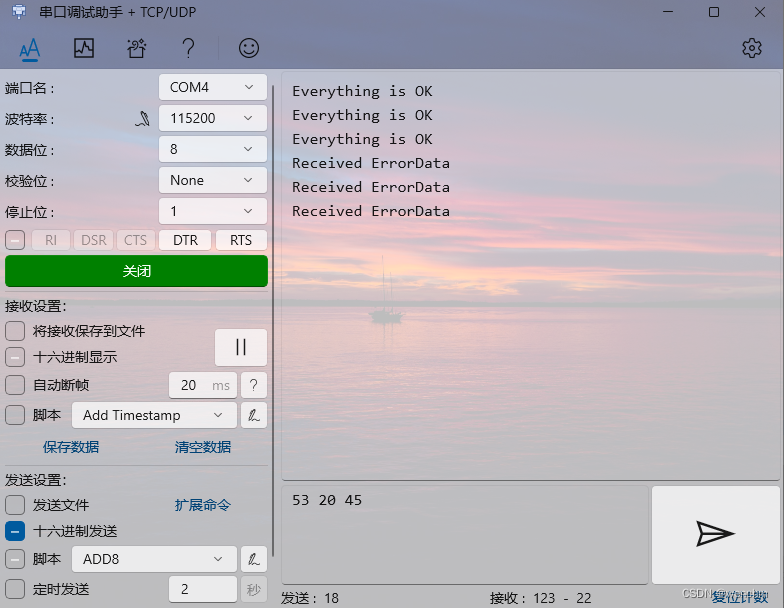
假如串口助手向MCU一次发送3字节的数据,其中第二个字节的数据是有意义的,而前后两个字节是编码,作为帧头和帧尾(可以任意设置,此处分别用字符“S”和“E”来表示,它们在ASC Ⅱ码表中对应的十六进制数分别为0x53和0x45)。当MCU通过串口接收到3字节的数后,可以首先判断帧头和帧尾是否正确,如果正确,再进行下一步的处理。
(1)修改while(1)中的代码:
while(1)
{
/*USERCODE BEGIN 3 */
if((RxBuffer[0] == 0x53)&&(RxBuffer[2] == 0x45)&&(CommFlag == 1))
{
CommFlag = 0;
if(RxBuffer[1]==0x10)
{
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_SET);
HAL_UART_Transmit_IT(&huart2,CommOkMessage,19);
}
else
{
HAL_GPIO_WritePin(LED_GPIO_Port,LED_Pin,GPIO_PIN_RESET);
HAL_UART_Transmit_IT(&huart2,CommErrMessage,22);
}
}
}
/*USER CODE END 3 */例子中,实现了用中断方式接收串口数据,并通过回调函数一次性处理串口接收的多字节数据;此外,还使用中断和非中断方式实现了串口数据发送。
(2)修改2
/* USER CODE BEGIN PV */
uint8_t CommOkMessage[]="Everything is OK\r\n";
uint8_t CommErrMessage[]="Received ErrorData\r\n";
uint8_t CommFlag =0;
uint8_t RxBuffer[RXBUFFERSIZE]={0};
/* USER CODE END PV */(3)修改3
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
CommFlag =1;
HAL_UART_Receive_IT(&huart2,(uint8_t *)RxBuffer,RXBUFFERSIZE);
}
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
HAL_GPIO_WritePin(BUZ_GPIO_Port,BUZ_Pin,GPIO_PIN_RESET);
HAL_Delay(100); //延时
HAL_GPIO_WritePin(BUZ_GPIO_Port,BUZ_Pin,GPIO_PIN_SET);
}
/* USER CODE END 4 */(4)修改4
/* Private defines -----------------------------------------------------------*/
#define KEY_Pin GPIO_PIN_13
#define KEY_GPIO_Port GPIOC
#define KEY_EXTI_IRQn EXTI15_10_IRQn
#define BUZ_Pin GPIO_PIN_4
#define BUZ_GPIO_Port GPIOA
#define LEDF_Pin GPIO_PIN_5
#define LEDF_GPIO_Port GPIOA
#define RXBUFFERSIZE 3 //接收缓冲区的长度(5)修改5
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart2,(uint8_t*)RxBuffer,RXBUFFERSIZE);
/* USER CODE END 2 */3、下载并运行
通过串口助手,先发送3次53 10 45,应该收到3次数据正确的提示;再发送3次53 20 45,应该收到3次数据错误的提示。