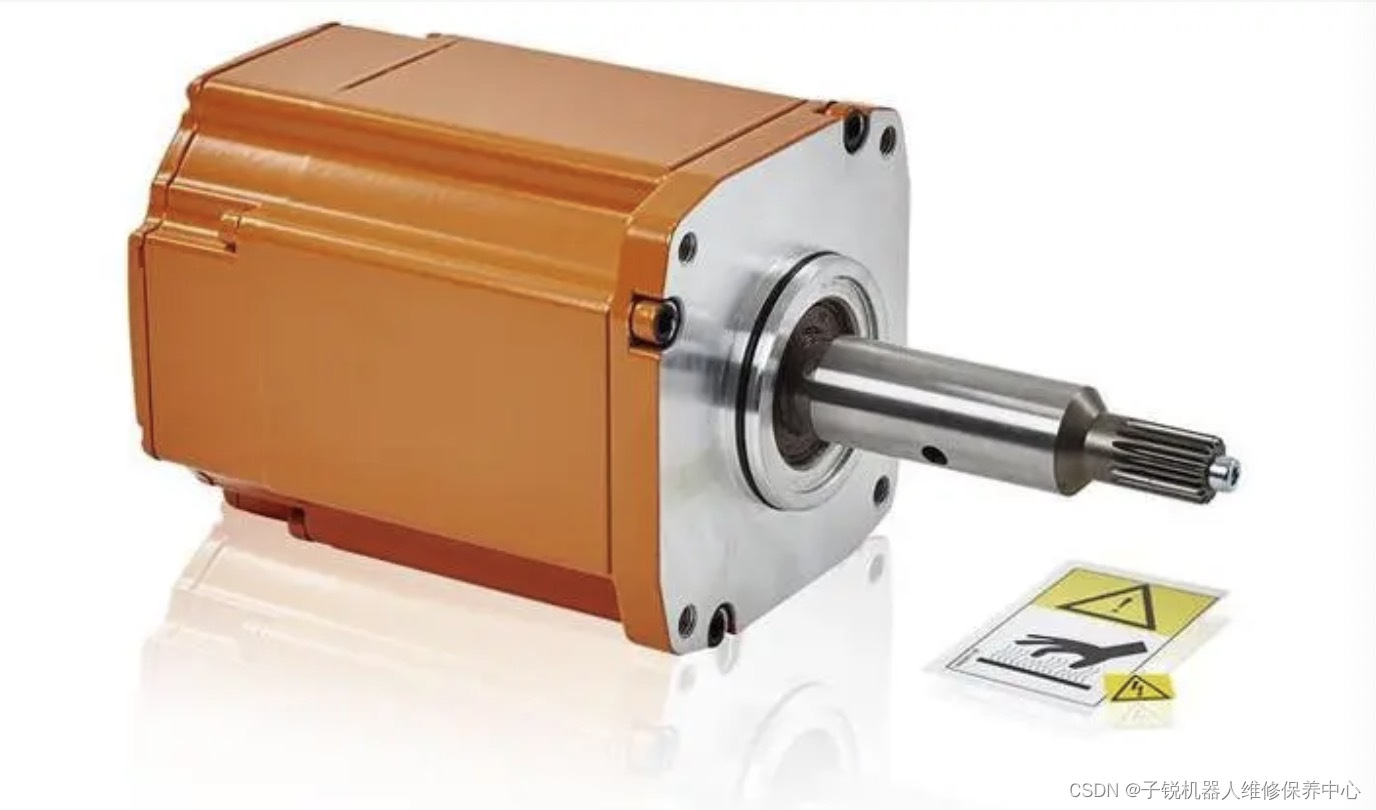
安川机器人作为现代工业自动化的重要设备,其稳定运行对于生产线的连续性和效率至关重要。然而,随着使用时间的增长,可能会出现各种YASKAWA机器人本体线缆故障,如断线、短路、接触不良等。
一、安川工业机器人电缆维修前的准备
在进行安川机器人本体线缆维修前,需要做好以下准备工作:
1. 断电检查:首先,必须确保机器人电源已断开,以避免在维修过程中发生触电事故。
2. 工具准备:准备好所需的维修工具,如剥线钳、螺丝刀、焊台、绝缘胶带等。
3. 线缆检查:对安川机器人本体线缆HW1171921-B进行全面检查,了解故障的具体位置和类型。
子锐机器人常见安川机器人电缆维修型号包括:YASKAWA机械手HW1171921-B线缆维修、安川机械臂HW1171418-B线缆维修、安川工业机器人DX200线缆HW1171418-B维修、YASKAWA机器人焊接电源线HW1171741-B维修
二、YASKAWA机械手本体线缆维修步骤
1. 故障定位:通过观察线缆外观、测量导线电阻等方法,确定故障发生的具体位置。对于较复杂的线缆系统,可使用安川机械臂HW1171921-B控制信号线缆测试仪进行故障定位。
2. 机械应力处理:检查线缆在机器人移动过程中是否受到过度的拉伸、扭曲等机械应力。如有必要,重新整理或更换线缆,确保其不受过度应力影响。
3. 更换老化线缆:对于老化严重的线缆,应进行更换。选择与原线缆规格相符的新线缆,并确保连接可靠。
4. 清理与防腐处理:对腐蚀的线缆部分进行清理,并使用防锈漆等材料进行防腐处理,以延长安川机械臂HW1171921-B线缆的使用寿命。
5. 重新安装:按照机器人要求重新安装线缆,确保其不受应力、扭曲等不良影响。同时检查连接处是否牢固,无虚接现象。
YASKAWA机器人HW1171921-B电缆维修
2024-06-14 00:54:01 7 阅读