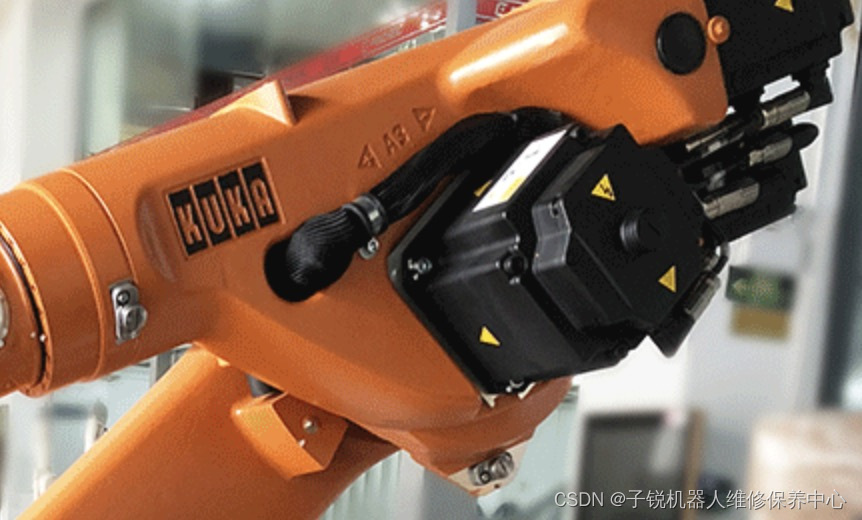
要深入了解故障处理,首先需对ABB机械手臂伺服电机的基本构成和工作原理有认识。ABB机器人电机通常包括机械臂伺服电机、机器人步进电机和机械手直流电机等类型,它们通过精密的控制和反馈机制实现精确定位和动作执行。然而不可避免的是,这些设备有时也会遭遇ABB工业机器人IRB6660伺服电机故障。
一、常见ABB工业机械手IRB6660电机故障与诊断
在ABB机械臂电机的日常运行中,可能遇到的故障包括但不限于:过载、编码器故障、电源问题、通讯中断等。针对这些故障,我们采用结构化的诊断流程来识别问题的根源,这通常涉及系统自检、信号追踪和硬件检测。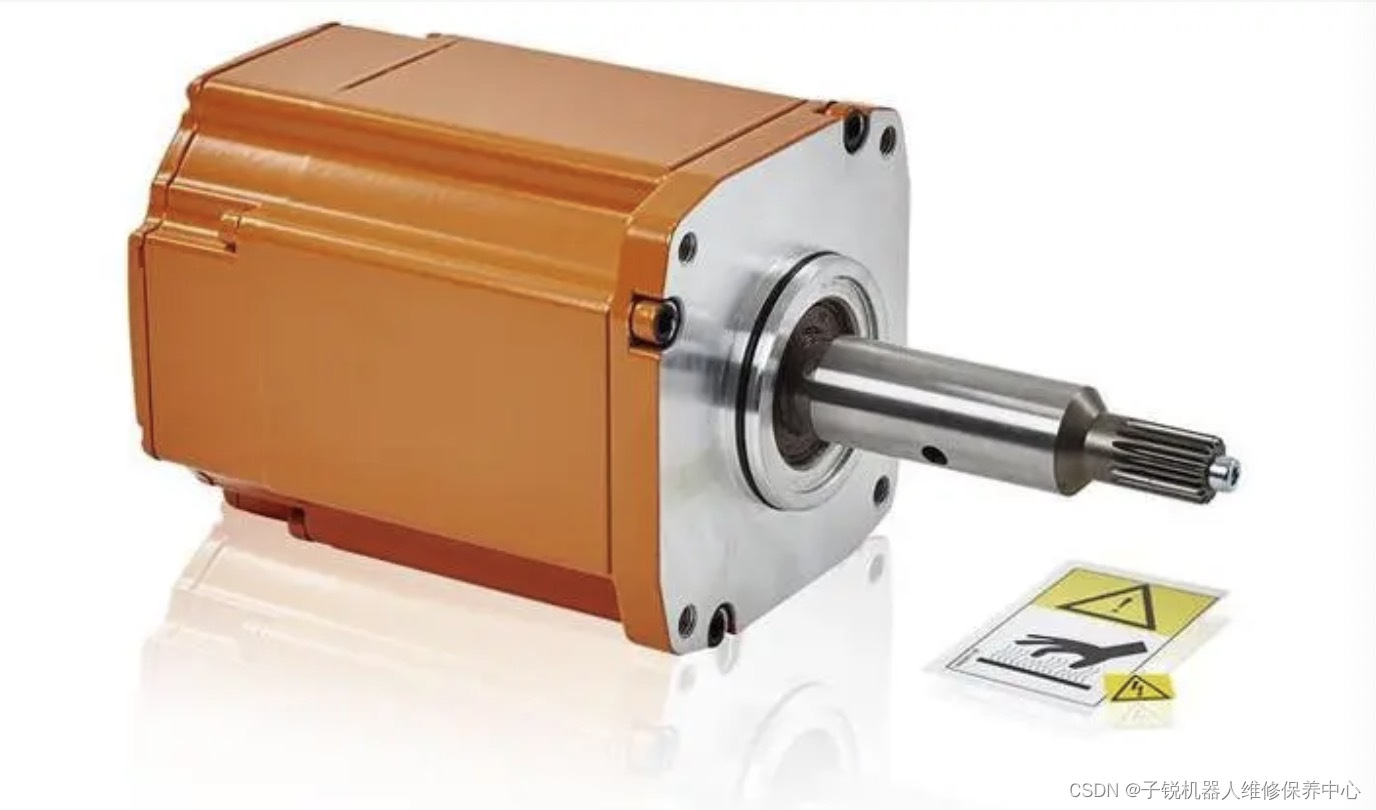
二、ABB机器人伺服马达维修策略
1. 过载问题
过载不仅会导致电机性能下降,还可能引起ABB机械手电机或工业机器人驱动器损坏。对策是检查工作负载是否超出电机额定值,并调整加速和减速时间以避免突然负载变化。
2. 编码器故障
编码器负责将位置信息反馈给控制系统,其故障可能导致定位失准。维修时,应检查编码器连接和安装是否正确,必要时需进行重新校准或更换。
3. 电源问题
不稳定的电源供应会影响ABB机械手IRB6660电机的性能。确保电源线路无损伤,保险丝完好,同时考虑使用不间断电源(UPS)保护系统免受电压波动影响。
4. 通讯中断
通讯中断会导致指令无法送达或反馈丢失。应检查ABB机械臂通讯线路的完整性,更新软件和固件以确保兼容性,以及排查外界干扰的可能性。
子锐机器人ABB机械臂电机维修/机器人伺服马达维修常见型号包括:
ABB伺服马达 3HAC17333-1维修
ABB机器人 3HAC17338-1电机维修
ABB喷涂机器人电机 3HAC17339-1维修
ABB机械手 3HAC17344-1伺服电机维修
ABB机器人3HAC043457-003伺服马达维修
ABB手臂伺服电机 3HNP03386-1维修
ABB喷涂机械手电机3HNP 04387-1维修
ABB搬运机器人伺服电机3HAC020208-001维修
ABB机器人伺服电机3HAC17484-6维修等。
ABB工业机器人IRB6660伺服电机维修常见故障
2024-04-28 14:12:02 38 阅读


































![[答疑]序列图怎么表达do...while循环](https://img-blog.csdnimg.cn/img_convert/d37574c26e77b3cddc55902a17260f86.png)