💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡
蛇形动态卷积是一种新型的卷积操作,旨在提高对细长和弯曲的管状结构的特征提取能力。它通过自适应地调整卷积核的权重,使得网络能够更加关注管状结构的局部特征,如血管的分叉和弯曲部分。这种卷积操作的设计灵感来源于蛇形曲线,它能够在不同尺度上捕捉到管状结构的细节信息,从而提高准确性。通过在卷积过程中引入这种动态性,DSCNet能够更有效地处理管状结构的复杂性和变异性,为后续的特征融合提供更精细的信息。文章在介绍主要的原理后,将手把手教学如何进行模块的代码添加和修改,并将修改后的完整代码放在文章的最后,方便大家一键运行,小白也可轻松上手实践。以帮助您更好地学习深度学习目标检测YOLO系列的挑战。
目录
1.原理
代码实现:官方代码仓库——点击即可跳转
动态蛇形卷积(Dynamic Snake Convolution)的设计灵感来源于蛇形的形状,用于改善对目标形状和边界的敏感性。能够帮助神经网络更好地捕捉目标的形状信息,特别是对于复杂的或不规则形状的目标。通过引入动态的、可变形的卷积核来实现这一目标。这种可变形的卷积核能够根据目标的形状和边界信息进行调整,从而更好地适应目标的特定形状。
传统的卷积操作在处理目标形状变化较大的情况下可能存在一定的局限性,而动态蛇形卷积则能够通过自适应性地调整卷积核的形状和大小,更有效地捕获目标的特征。
这种模块的应用通常能够增强目标检测模型对不同尺度、形状和姿态的目标的感知能力,从而提高目标检测的准确性和鲁棒性。虽然这只是目标检测中的一种模块,但它代表了在深度学习领域中不断创新和改进的努力,以提高模型对复杂场景的理解能力。
蛇形动态卷积(Snake-like Dynamic Convolution)是一种卷积神经网络中的技术,旨在提升卷积操作的灵活性和适应性,以便更好地捕捉和表征图像中的复杂结构。以下是蛇形动态卷积的基本原理和其核心概念的详细讲解:
1. 卷积操作的基本概念
在传统的卷积神经网络(CNN)中,卷积层使用固定形状的滤波器(卷积核)在图像上滑动,执行点积运算,从而提取局部特征。这些滤波器的参数在训练过程中被学习,并在整个输入图像上重复使用。
2. 动态卷积的引入
传统卷积的局限性在于,固定形状和参数的卷积核可能无法适应图像中复杂和多样的局部结构。为了解决这一问题,动态卷积应运而生。动态卷积的核心思想是,根据输入数据动态调整卷积核的参数,使其更加适应局部特征。
3. 蛇形动态卷积的具体机制
蛇形动态卷积是动态卷积的一种特殊形式,其名称源于卷积核的形状和应用方式。其主要特点如下:
a. 蛇形核形状
蛇形动态卷积核的形状不是固定的矩形或方形,而是类似于蛇形路径。这样设计的目的是为了能够更灵活地捕捉图像中的曲线和非直线结构。这种核形状可以更好地适应图像中的复杂边缘和纹理。
b. 动态调整权重
蛇形动态卷积的权重不是固定的,而是根据输入数据动态生成的。通常使用一个生成网络(如小型卷积网络或注意力机制)来根据当前输入生成适应性的权重。这些权重在卷积操作时被应用,从而使得卷积核在不同位置具有不同的特性。
c. 多尺度特征提取
蛇形动态卷积可以通过不同尺度的卷积核捕捉图像中的多尺度特征。通过结合不同尺度的特征,可以更全面地描述图像中的结构信息。
4. 蛇形动态卷积的优势
更强的特征表达能力:通过动态调整卷积核的形状和权重,蛇形动态卷积可以更好地适应图像中的多样性和复杂性,从而提取更加丰富和准确的特征。
灵活性和适应性:这种卷积方式能够根据输入的变化动态调整自身,从而在处理不同类型的图像和任务时具有更好的适应性。
提升模型性能:在实际应用中,蛇形动态卷积常常能够提升图像分类、目标检测和语义分割等任务的性能。
蛇形动态卷积是一种创新的卷积操作方式,通过引入动态权重调整和灵活的核形状,能够更好地捕捉图像中的复杂结构特征。这种方法在许多计算机视觉任务中展示了其优越性和潜力。
2. 蛇形动态卷积的代码实现
2.1 将蛇形动态卷积添加到YOLOv8中
关键步骤一:将下面代码粘贴到在/ultralytics/ultralytics/nn/modules/conv.py中,并在该文件的__all__中添加“DySnakeConv”
class DySnakeConv(nn.Module):
def __init__(self, inc, ouc, k=3, act=True) -> None:
super().__init__()
self.conv_0 = Conv(inc, ouc, k, act=act)
self.conv_x = DSConv(inc, ouc, 0, k)
self.conv_y = DSConv(inc, ouc, 1, k)
self.conv_1x1 = Conv(ouc * 3, ouc, 1, act=act)
def forward(self, x):
return self.conv_1x1(torch.cat([self.conv_0(x), self.conv_x(x), self.conv_y(x)], dim=1))
class DSConv(nn.Module):
def __init__(self, in_ch, out_ch, morph, kernel_size=3, if_offset=True, extend_scope=1):
"""
The Dynamic Snake Convolution
:param in_ch: input channel
:param out_ch: output channel
:param kernel_size: the size of kernel
:param extend_scope: the range to expand (default 1 for this method)
:param morph: the morphology of the convolution kernel is mainly divided into two types
along the x-axis (0) and the y-axis (1) (see the paper for details)
:param if_offset: whether deformation is required, if it is False, it is the standard convolution kernel
"""
super(DSConv, self).__init__()
# use the <offset_conv> to learn the deformable offset
self.offset_conv = nn.Conv2d(in_ch, 2 * kernel_size, 3, padding=1)
self.bn = nn.BatchNorm2d(2 * kernel_size)
self.kernel_size = kernel_size
# two types of the DSConv (along x-axis and y-axis)
self.dsc_conv_x = nn.Conv2d(
in_ch,
out_ch,
kernel_size=(kernel_size, 1),
stride=(kernel_size, 1),
padding=0,
)
self.dsc_conv_y = nn.Conv2d(
in_ch,
out_ch,
kernel_size=(1, kernel_size),
stride=(1, kernel_size),
padding=0,
)
self.gn = nn.GroupNorm(out_ch // 4, out_ch)
self.act = Conv.default_act
self.extend_scope = extend_scope
self.morph = morph
self.if_offset = if_offset
def forward(self, f):
offset = self.offset_conv(f)
offset = self.bn(offset)
# We need a range of deformation between -1 and 1 to mimic the snake's swing
offset = torch.tanh(offset)
input_shape = f.shape
dsc = DSC(input_shape, self.kernel_size, self.extend_scope, self.morph)
deformed_feature = dsc.deform_conv(f, offset, self.if_offset)
if self.morph == 0:
x = self.dsc_conv_x(deformed_feature.type(f.dtype))
x = self.gn(x)
x = self.act(x)
return x
else:
x = self.dsc_conv_y(deformed_feature.type(f.dtype))
x = self.gn(x)
x = self.act(x)
return x
# Core code, for ease of understanding, we mark the dimensions of input and output next to the code
class DSC(object):
def __init__(self, input_shape, kernel_size, extend_scope, morph):
self.num_points = kernel_size
self.width = input_shape[2]
self.height = input_shape[3]
self.morph = morph
self.extend_scope = extend_scope # offset (-1 ~ 1) * extend_scope
# define feature map shape
"""
B: Batch size C: Channel W: Width H: Height
"""
self.num_batch = input_shape[0]
self.num_channels = input_shape[1]
"""
input: offset [B,2*K,W,H] K: Kernel size (2*K: 2D image, deformation contains <x_offset> and <y_offset>)
output_x: [B,1,W,K*H] coordinate map
output_y: [B,1,K*W,H] coordinate map
"""
def _coordinate_map_3D(self, offset, if_offset):
device = offset.device
# offset
y_offset, x_offset = torch.split(offset, self.num_points, dim=1)
y_center = torch.arange(0, self.width).repeat([self.height])
y_center = y_center.reshape(self.height, self.width)
y_center = y_center.permute(1, 0)
y_center = y_center.reshape([-1, self.width, self.height])
y_center = y_center.repeat([self.num_points, 1, 1]).float()
y_center = y_center.unsqueeze(0)
x_center = torch.arange(0, self.height).repeat([self.width])
x_center = x_center.reshape(self.width, self.height)
x_center = x_center.permute(0, 1)
x_center = x_center.reshape([-1, self.width, self.height])
x_center = x_center.repeat([self.num_points, 1, 1]).float()
x_center = x_center.unsqueeze(0)
if self.morph == 0:
"""
Initialize the kernel and flatten the kernel
y: only need 0
x: -num_points//2 ~ num_points//2 (Determined by the kernel size)
!!! The related PPT will be submitted later, and the PPT will contain the whole changes of each step
"""
y = torch.linspace(0, 0, 1)
x = torch.linspace(
-int(self.num_points // 2),
int(self.num_points // 2),
int(self.num_points),
)
y, x = torch.meshgrid(y, x)
y_spread = y.reshape(-1, 1)
x_spread = x.reshape(-1, 1)
y_grid = y_spread.repeat([1, self.width * self.height])
y_grid = y_grid.reshape([self.num_points, self.width, self.height])
y_grid = y_grid.unsqueeze(0) # [B*K*K, W,H]
x_grid = x_spread.repeat([1, self.width * self.height])
x_grid = x_grid.reshape([self.num_points, self.width, self.height])
x_grid = x_grid.unsqueeze(0) # [B*K*K, W,H]
y_new = y_center + y_grid
x_new = x_center + x_grid
y_new = y_new.repeat(self.num_batch, 1, 1, 1).to(device)
x_new = x_new.repeat(self.num_batch, 1, 1, 1).to(device)
y_offset_new = y_offset.detach().clone()
if if_offset:
y_offset = y_offset.permute(1, 0, 2, 3)
y_offset_new = y_offset_new.permute(1, 0, 2, 3)
center = int(self.num_points // 2)
# The center position remains unchanged and the rest of the positions begin to swing
# This part is quite simple. The main idea is that "offset is an iterative process"
y_offset_new[center] = 0
for index in range(1, center):
y_offset_new[center + index] = (y_offset_new[center + index - 1] + y_offset[center + index])
y_offset_new[center - index] = (y_offset_new[center - index + 1] + y_offset[center - index])
y_offset_new = y_offset_new.permute(1, 0, 2, 3).to(device)
y_new = y_new.add(y_offset_new.mul(self.extend_scope))
y_new = y_new.reshape(
[self.num_batch, self.num_points, 1, self.width, self.height])
y_new = y_new.permute(0, 3, 1, 4, 2)
y_new = y_new.reshape([
self.num_batch, self.num_points * self.width, 1 * self.height
])
x_new = x_new.reshape(
[self.num_batch, self.num_points, 1, self.width, self.height])
x_new = x_new.permute(0, 3, 1, 4, 2)
x_new = x_new.reshape([
self.num_batch, self.num_points * self.width, 1 * self.height
])
return y_new, x_new
else:
"""
Initialize the kernel and flatten the kernel
y: -num_points//2 ~ num_points//2 (Determined by the kernel size)
x: only need 0
"""
y = torch.linspace(
-int(self.num_points // 2),
int(self.num_points // 2),
int(self.num_points),
)
x = torch.linspace(0, 0, 1)
y, x = torch.meshgrid(y, x)
y_spread = y.reshape(-1, 1)
x_spread = x.reshape(-1, 1)
y_grid = y_spread.repeat([1, self.width * self.height])
y_grid = y_grid.reshape([self.num_points, self.width, self.height])
y_grid = y_grid.unsqueeze(0)
x_grid = x_spread.repeat([1, self.width * self.height])
x_grid = x_grid.reshape([self.num_points, self.width, self.height])
x_grid = x_grid.unsqueeze(0)
y_new = y_center + y_grid
x_new = x_center + x_grid
y_new = y_new.repeat(self.num_batch, 1, 1, 1)
x_new = x_new.repeat(self.num_batch, 1, 1, 1)
y_new = y_new.to(device)
x_new = x_new.to(device)
x_offset_new = x_offset.detach().clone()
if if_offset:
x_offset = x_offset.permute(1, 0, 2, 3)
x_offset_new = x_offset_new.permute(1, 0, 2, 3)
center = int(self.num_points // 2)
x_offset_new[center] = 0
for index in range(1, center):
x_offset_new[center + index] = (x_offset_new[center + index - 1] + x_offset[center + index])
x_offset_new[center - index] = (x_offset_new[center - index + 1] + x_offset[center - index])
x_offset_new = x_offset_new.permute(1, 0, 2, 3).to(device)
x_new = x_new.add(x_offset_new.mul(self.extend_scope))
y_new = y_new.reshape(
[self.num_batch, 1, self.num_points, self.width, self.height])
y_new = y_new.permute(0, 3, 1, 4, 2)
y_new = y_new.reshape([
self.num_batch, 1 * self.width, self.num_points * self.height
])
x_new = x_new.reshape(
[self.num_batch, 1, self.num_points, self.width, self.height])
x_new = x_new.permute(0, 3, 1, 4, 2)
x_new = x_new.reshape([
self.num_batch, 1 * self.width, self.num_points * self.height
])
return y_new, x_new
"""
input: input feature map [N,C,D,W,H];coordinate map [N,K*D,K*W,K*H]
output: [N,1,K*D,K*W,K*H] deformed feature map
"""
def _bilinear_interpolate_3D(self, input_feature, y, x):
device = input_feature.device
y = y.reshape([-1]).float()
x = x.reshape([-1]).float()
zero = torch.zeros([]).int()
max_y = self.width - 1
max_x = self.height - 1
# find 8 grid locations
y0 = torch.floor(y).int()
y1 = y0 + 1
x0 = torch.floor(x).int()
x1 = x0 + 1
# clip out coordinates exceeding feature map volume
y0 = torch.clamp(y0, zero, max_y)
y1 = torch.clamp(y1, zero, max_y)
x0 = torch.clamp(x0, zero, max_x)
x1 = torch.clamp(x1, zero, max_x)
input_feature_flat = input_feature.flatten()
input_feature_flat = input_feature_flat.reshape(
self.num_batch, self.num_channels, self.width, self.height)
input_feature_flat = input_feature_flat.permute(0, 2, 3, 1)
input_feature_flat = input_feature_flat.reshape(-1, self.num_channels)
dimension = self.height * self.width
base = torch.arange(self.num_batch) * dimension
base = base.reshape([-1, 1]).float()
repeat = torch.ones([self.num_points * self.width * self.height
]).unsqueeze(0)
repeat = repeat.float()
base = torch.matmul(base, repeat)
base = base.reshape([-1])
base = base.to(device)
base_y0 = base + y0 * self.height
base_y1 = base + y1 * self.height
# top rectangle of the neighbourhood volume
index_a0 = base_y0 - base + x0
index_c0 = base_y0 - base + x1
# bottom rectangle of the neighbourhood volume
index_a1 = base_y1 - base + x0
index_c1 = base_y1 - base + x1
# get 8 grid values
value_a0 = input_feature_flat[index_a0.type(torch.int64)].to(device)
value_c0 = input_feature_flat[index_c0.type(torch.int64)].to(device)
value_a1 = input_feature_flat[index_a1.type(torch.int64)].to(device)
value_c1 = input_feature_flat[index_c1.type(torch.int64)].to(device)
# find 8 grid locations
y0 = torch.floor(y).int()
y1 = y0 + 1
x0 = torch.floor(x).int()
x1 = x0 + 1
# clip out coordinates exceeding feature map volume
y0 = torch.clamp(y0, zero, max_y + 1)
y1 = torch.clamp(y1, zero, max_y + 1)
x0 = torch.clamp(x0, zero, max_x + 1)
x1 = torch.clamp(x1, zero, max_x + 1)
x0_float = x0.float()
x1_float = x1.float()
y0_float = y0.float()
y1_float = y1.float()
vol_a0 = ((y1_float - y) * (x1_float - x)).unsqueeze(-1).to(device)
vol_c0 = ((y1_float - y) * (x - x0_float)).unsqueeze(-1).to(device)
vol_a1 = ((y - y0_float) * (x1_float - x)).unsqueeze(-1).to(device)
vol_c1 = ((y - y0_float) * (x - x0_float)).unsqueeze(-1).to(device)
outputs = (value_a0 * vol_a0 + value_c0 * vol_c0 + value_a1 * vol_a1 +
value_c1 * vol_c1)
if self.morph == 0:
outputs = outputs.reshape([
self.num_batch,
self.num_points * self.width,
1 * self.height,
self.num_channels,
])
outputs = outputs.permute(0, 3, 1, 2)
else:
outputs = outputs.reshape([
self.num_batch,
1 * self.width,
self.num_points * self.height,
self.num_channels,
])
outputs = outputs.permute(0, 3, 1, 2)
return outputs
def deform_conv(self, input, offset, if_offset):
y, x = self._coordinate_map_3D(offset, if_offset)
deformed_feature = self._bilinear_interpolate_3D(input, y, x)
return deformed_feature蛇形动态卷积的主要处理流程包括以下几个关键步骤:
1. 输入图像或特征图
首先,将输入图像或上一级网络输出的特征图输入到蛇形动态卷积层中。
2. 特征生成网络
特征生成网络用于根据输入数据生成卷积核的权重。这个网络通常是一个小型的卷积网络或注意力机制,具体步骤如下:
提取特征:通过若干卷积层提取输入特征图的高维特征。
生成权重:使用特定的机制(如全连接层或注意力模块)生成卷积核的权重。这些权重是动态的,即根据当前输入数据生成,并随每个输入样本而变化。
3. 生成蛇形卷积核
根据特征生成网络输出的权重,生成蛇形卷积核。蛇形卷积核的形状和大小可能会根据任务需求进行调整,常见的做法包括:
核形状设计:定义卷积核的具体形状,使其呈现出类似蛇形的路径。
权重赋值:使用生成的权重对蛇形卷积核进行赋值。
4. 执行卷积操作
使用生成的蛇形卷积核对输入图像或特征图执行卷积操作。具体过程如下:
滑动窗口:卷积核在输入图像或特征图上以滑动窗口的方式移动,覆盖每一个局部区域。
点积运算:对于每一个局部区域,卷积核的权重与输入特征进行点积运算,生成新的特征值。
5. 输出特征图
卷积操作生成的输出特征图将被传递到下一层网络。这个特征图包含了经过蛇形动态卷积处理后的信息,更好地反映了输入图像的局部结构和复杂特征。
2.2 更改init.py文件
关键步骤二:修改modules文件夹下的__init__.py文件,先导入函数

然后在下面的__all__中声明函数

2.3 添加yaml文件
关键步骤三:在/ultralytics/ultralytics/cfg/models/v8下面新建文件yolov8_DySnakeConv.yaml文件,粘贴下面的内容
*注:由于DySnakeConv并不改变图像大小,没有步长设置为2的过程。所以选择添加一层,通道数设置和输入一样,卷积核大小就为3。YOLOv8的ymal中没有不改变图像大小的conv,所以是无法替换的。
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, DySnakeConv, [512,3]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, "nearest"]]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 13], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 10], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)温馨提示:本文只是对yolov8l基础上添加模块,如果要对yolov5n/l/m/x进行添加则只需要指定对应的depth_multiple 和 width_multiple。
# YOLOv8n
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.25 # layer channel multiple
# YOLOv8s
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
# YOLOv8l
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple
# YOLOv8m
depth_multiple: 0.67 # model depth multiple
width_multiple: 0.75 # layer channel multiple
# YOLOv8x
depth_multiple: 1.33 # model depth multiple
width_multiple: 1.25 # layer channel multiple2.4 在task.py中进行注册
关键步骤四:在parse_model函数中进行注册,添加DySnakeConv,

2.5 执行程序
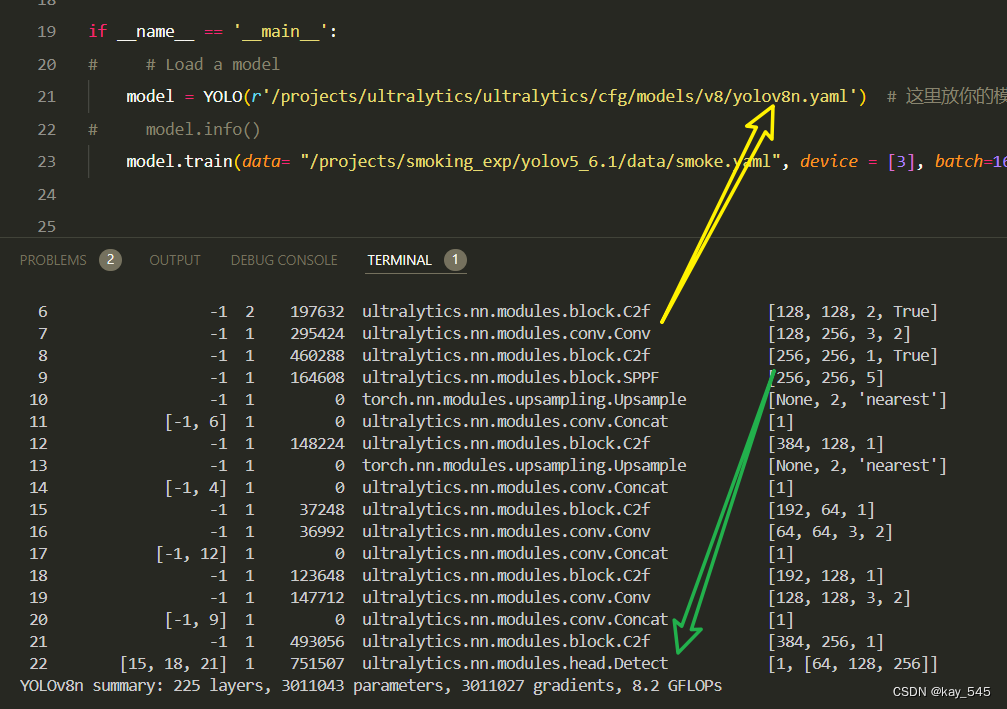
关键步骤五:在ultralytics文件中新建train.py,将model的参数路径设置为yolov8_DySnakeConv.yaml的路径即可
建议大家写绝对路径,确保一定能找到
from ultralytics import YOLO
# Load a model
# model = YOLO('yolov8n.yaml') # build a new model from YAML
# model = YOLO('yolov8n.pt') # load a pretrained model (recommended for training)
model = YOLO(r'/projects/ultralytics/ultralytics/cfg/models/v8/yolov8_SimRepCSP.yaml') # build from YAML and transfer weights
# Train the model
model.train(device = [3], batch=16)🚀运行程序,如果出现下面的内容则说明添加成功🚀
3. 完整代码分享
4. GFLOPs
关于GFLOPs的计算方式可以查看:百面算法工程师 | 卷积基础知识——Convolution
未改进的YOLOv8nGFLOPs
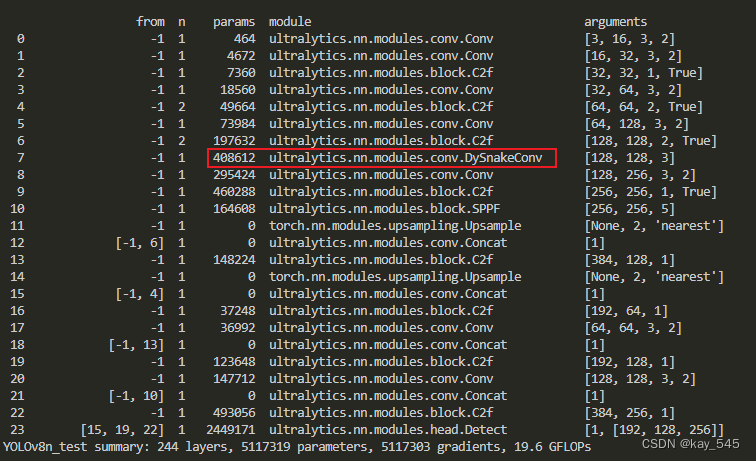
改进后的GFLOPs

5. 进阶
与c2f结合和添加不同位置的蛇形动态卷积
6. 总结
动态蛇形卷积通过引入灵活的、类似蛇形路径的卷积核和动态权重生成机制,提升卷积操作的适应性和特征表达能力。具体而言,它利用一个特征生成网络,根据输入图像或特征图动态生成卷积核的权重,并将这些权重赋予预定义的蛇形路径卷积核,以适应输入的局部结构。在卷积操作中,这些动态生成的卷积核能够更灵活地捕捉和表征图像中的复杂和多样化的特征,从而增强卷积神经网络在图像处理任务中的性能。





![[<span style='color:red;'>卷</span><span style='color:red;'>积</span>神经<span style='color:red;'>网络</span>]<span style='color:red;'>YoloV</span><span style='color:red;'>8</span>](https://img-blog.csdnimg.cn/direct/1535a0c80792478da6095943c825ba1a.png)