目录
1.位图
2.位图的应用
3.布隆过滤器
1.位图
1.1 位图的概念:
在海量数据中,并且数据都不重复, 那么要查找某一个数据使用其他的方法, 不仅会消耗很大的内存, 并且效率非常之低下. 那么就是可以采用每个比特位进行存放数据的信息(是否存在).
1.2 举个小小的实际栗子:
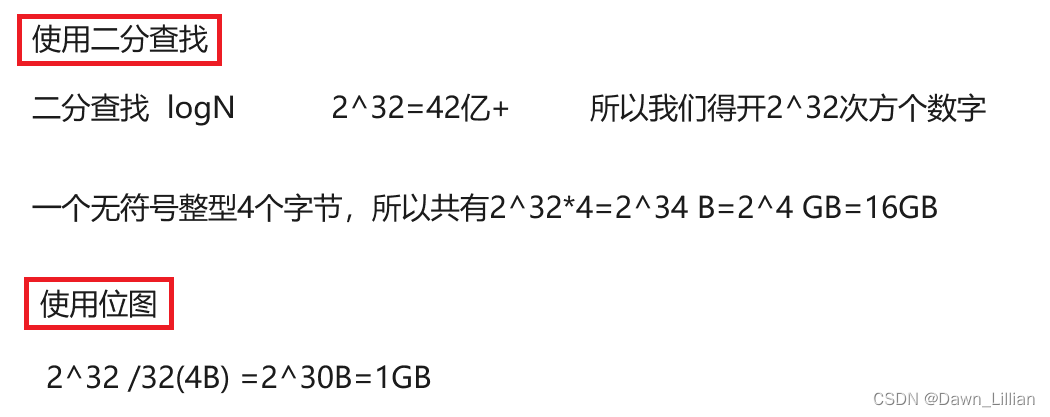
问题介绍: 给40 亿个不重复的无符号整数,没排过序。给一个无符号整数,如何快速判断一个数是否在 这40 亿个数中.
(1)我们可能会思考到遍历;二分查找那么你要考虑到如果是遍历那么时间复杂度为O(n); 二分查找不仅要求数据是升序排放而且时间复杂度为O(log2^n).
(2)如果采用位图的方法:
那么需要多少个比特位捏? 2^32 = 4,294,967,296(42亿个数据);
那么需要多少内存捏? 2^32 / 8 / 1024 / 1024 / 1024 = 0.5G
1.3位图的实现
(1) bitset构造函数:
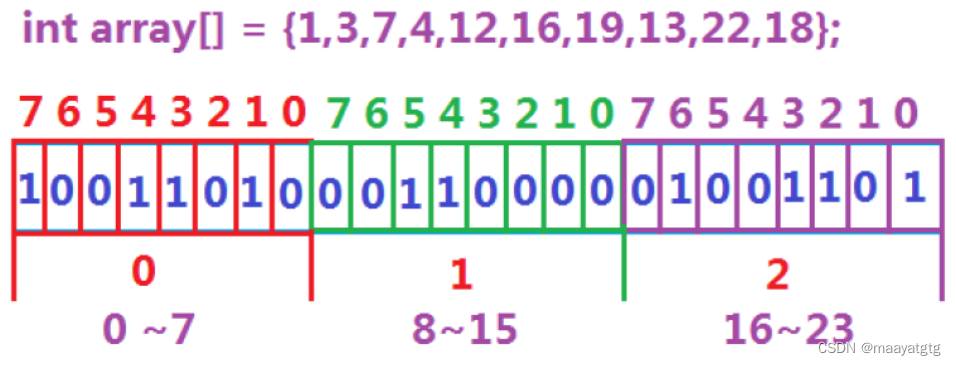
_bitset是数组类型为int, 分成4byte, 那么就是4 * 8= 32bit; 然后全部初始化为0.
bitset()
{
//_bits.resize(N / 32 + 1, 0);
_bits.resize((N >> 5) + 1, 0);
}(2) set位图操作:
因为一个数据我们不知道它是在哪个块中(这里简单理解32bit为一个块, 然后还有在块的第几个位置.那么刚好需要找到.
然后还要将j位数据置1,其他位不变捏?
那就是采用这一位的数据按位或上1.如果为0,那么也是1, 为1更加是1.

void set(size_t x)
{
size_t i = x / 32;
size_t j = x % 32;
_bits[i] |= (1 << j);
}(3) reset操作:
和上面set找到数据一样; 处理数据就是将j位置置0, 其他位置不变.
如何保证j位置置0, 其他位置不变?
那就是将j位置按位与1的取反,那么无论j为是0还是1都被置0; 1的其他位取反之后是1和其他位按位与还是本身.

void reset(size_t x)
{
size_t i = x / 32;
size_t j = x % 32;
_bits[i] &= ~(1 << j);
}(4)测试test:
测试数据的j位是否为1还是为0.
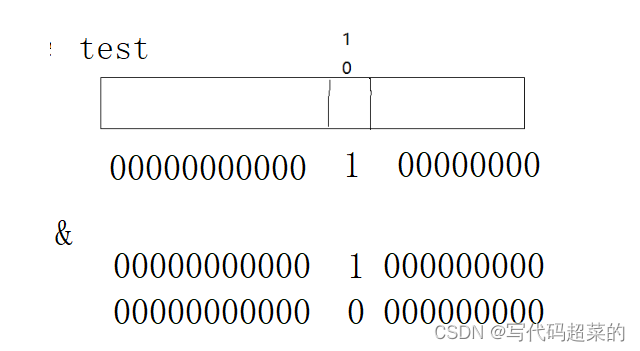
void test(size_t x)
{
size_t i = x / 32;
size_t j = x % 32;
return _bits[i] & (1 << j);
}(5)主函数main:
#define _CRT_SECURE_NO_WARNINGS 1
#include"bitset.h"
#include<iostream>
#include<vector>
using namespace std;
int main()
{
study::bitset<100> bs;
bs.set(40);
bs.set(39);
cout << bs.test(38) << endl;
cout << bs.test(39) << endl;
cout << bs.test(40) << endl;
cout << bs.test(41) << endl;
bs.reset(40);
cout << bs.test(38) << endl;
cout << bs.test(39) << endl;
cout << bs.test(40) << endl;
cout << bs.test(41) << endl;
return 0;
}2.位图的应用
(1) 给定100亿个整数,设计算法找到只出现一次的整数?
分析: 那么可以将一个位图的状态分为三种: 出现0次, 出现1次, 出现两次及以上.
template<size_t N>
class twobitset
{
public:
void set(size_t x)
{
//0->1 00 -> 01
if (_bs1.test(x) == false && _bs2.test(x) == false)
{
_bs2.set(x);
}
//1->2 01 -> 10
else if (_bs1.test(x) == false && _bs2.test(x) == true)
{
_bs1.set(x);
_bs2.reset(x);
}
//2->3 10 -> 11
else if (_bs1.test(x) == true && _bs2.test(x) == false)
{
_bs1.set(x);
_bs2.set(x);
}
//3->..不变
}
void print()
{
for (size_t i = 0; i < N; i++)
{
//01
if (_bs1.test(i) == false && _bs2.test(i) == true)
{
cout << "1->" << i << endl;
}
//10
else if (_bs1.test(i) == true && _bs2.test(i) == false)
{
cout << "2->" << i << endl;
}
}
cout << endl;
}
private:
bitset<N> _bs1;
bitset<N> _bs2;
};(2)给两个文件,分别有100亿个整数,我们只有1G内存,如何找到两个文件交集?
可以这样分析: 将两个文件的数据映射两个位图, 如果一个值在两张位图里面都存在就是交集.
template<size_t N>
class intersection
{
public:
void set(size_t x)
{
//出现0次 0 -> 1
if (_bits1.test(x) == false)
{
_bits1.set(x);
}
//出现两次及其以上.
if (_bits2.test(x) == false)
{
_bits2.set(x);
}
}
void check(size_t x)
{
for (size_t i = 0; i < N; i++)
{
//相交就返回.
if (_bits1.test(i) == true && _bits2.test(i) == true)
{
cout << "相交" << i << endl;
}
}
cout << endl;
}
private:
bitset<N> _bits1;
bitset<N> _bits2;
};(3) 1个文件有100亿个int,1G内存,设计算法找到出现次数不超过2次的所有整数?
是不是和第一个实例优点相同; 那你猜对了,一个位图的状态分为种情况; 分别是出现次数为0; 出现为1次; 出现次数为2; 出现次数2次以上.
template<size_t N>
class threebitset
{
public:
void set(size_t x)
{
//0次 000 -> 001
if (_bs1.test(x) == false && _bs2.test(x) == false && _bs3.test(x) == false)
{
_bs3.set(x);
}
//1次 001 -> 010
else if (_bs1.test(x) == false && _bs2.test(x) == false && _bs3.test(x) == true)
{
_bs2.set(x);
_bs3.reset(x);
}
//2次 010 -> 011
else if (_bs1.test(x) == false && _bs2.test(x) == true && _bs3.test(x) == false)
{
_bs3.set(x);
}
//3次 011 -> 100
else if (_bs1.test(x) == false && _bs2.test(x) == true && _bs3.test(x) == true)
{
_bs1.set(x);
_bs2.reset(x);
_bs3.reset(x);
}
//3次及其以上 100;不管
}
void print()
{
for (size_t i = 0; i < N; i++)
{
//出现0次
if (_bs1.test(i) == false && _bs2.test(i) == false && _bs3.test(i) == false)
{
cout << "0->" << i << endl;
}
//出现1次
else if (_bs1.test(i) == false && _bs2.test(i) == false && _bs3.test(i) == true)
{
cout << "1->" << i << endl;
}
//出现2次
else if (_bs1.test(i) == false && _bs2.test(i) == true && _bs3.test(i) == false)
{
cout << "2->" << i << endl;
}
}
cout << endl;
}
private:
bitset<N> _bs1;
bitset<N> _bs2;
bitset<N> _bs3;
};3.布隆过滤器
考虑一个小问题:
如果是整形考虑在不在以及子类问题, 那就是位图可以解决;
那如果是其他类型考虑在不在捏? 那就要上布隆过滤器.
3.1代码编写
(1) BKDRHash和APHash以及DJBHash都是用来映射的, 由于一个值如果映射一个位置就很容易导致冲突, 造成误判, 然而上面的三种方法就是一个值映射到多个位置, 降低误判的概率,但是无法避免.
(2)一般布隆过滤器是不允许删除的,因为映射的值如果删除很可能会影响到其他的值的查找.

#pragma once
#include<iostream>
#include<vector>
#include<string>
#include"Bitset.h"
using namespace std;
namespace Study
{
struct BKDRHash
{
size_t operator()(const string& key)
{
// BKDR
size_t hash = 0;
for (auto e : key)
{
hash *= 31;
hash += e;
}
return hash;
}
};
struct APHash
{
size_t operator()(const string& key)
{
size_t hash = 0;
for (size_t i = 0; i < key.size(); i++)
{
char ch = key[i];
if ((i & 1) == 0)
{
hash ^= ((hash << 7) ^ ch ^ (hash >> 3));
}
else
{
hash ^= (~((hash << 11) ^ ch ^ (hash >> 5)));
}
}
return hash;
}
};
struct DJBHash
{
size_t operator()(const string& key)
{
size_t hash = 5381;
for (auto ch : key)
{
hash += (hash << 5) + ch;
}
return hash;
}
};
template<size_t N,
class K = string,
class HashFunc1 = BKDRHash,
class HashFunc2 = APHash,
class HashFunc3 = DJBHash>
class BoolFilter
{
public:
void set(const K& key)
{
size_t hash1 = HashFunc1()(key) % N;
size_t hash2 = HashFunc2()(key) % N;
size_t hash3 = HashFunc3()(key) % N;
_bs.set(hash1);
_bs.set(hash2);
_bs.set(hash3);
}
//一般不允许删除滴,因为会影响到其他的值.
void Reset(const K& key);
bool Test(const K& key)
{
size_t hash1 = HashFunc1()(key) % N;
if (_bs.test(hash1) == false)
return false;
size_t hash2 = HashFunc2()(key) % N;
if (_bs.test(hash2) == false)
return false;
size_t hash3 = HashFunc3()(key) % N;
if (_bs.test(hash3) == false)
return false;
//存在误判
return true;
}
private:
study::bitset<N> _bs;
};
void TestBF1()
{
BoolFilter<100> bf;
bf.set("桃子");
bf.set("香蕉");
bf.set("哈密瓜");
bf.set("西瓜");
cout << bf.Test("桃子") << endl;
cout << bf.Test("香蕉") << endl;
cout << bf.Test("哈密瓜") << endl;
cout << bf.Test("葡萄") << endl;
cout << bf.Test("西瓜") << endl;
cout << bf.Test("火龙果") << endl;
cout << bf.Test("香瓜 ") << endl;
cout << bf.Test("猕猴桃") << endl;
}
void TestBF2()
{
srand(time(0));
const size_t N = 10000;
BoolFilter<N * 10> bf;
vector<string> v1;
string url = "西瓜";
for (size_t i = 0; i < N; i++)
{
v1.push_back(url + to_string(i));
}
for (auto& str : v1)
{
bf.set(str);
}
vector<string> v2;
for (size_t i = 0; i < N; i++)
{
string urlstr = url;
urlstr += to_string(999999 + i);
v2.push_back(urlstr);
}
size_t n2 = 0;
for (auto& str : v2)
{
if (bf.Test(str))//误判
{
n2++;
}
}
cout << "相似字符的误判率为:" << (double)n2 / (double)N << endl;
vector<string> v3;
for (size_t i = 0; i < N; i++)
{
string url = "桃子";
url += to_string(i + rand());
v3.push_back(url);
}
size_t n3 = 0;
for (auto& str : v3)
{
if (bf.Test(str))//误判
{
n3++;
}
}
cout << "相似字符的误判率为:" << (double)n3 / (double)N << endl;
}
}3.2布隆过滤器的应用
(1)给两个文件,分别有100亿个query,我们只有1G内存,如何找到两个文件交集?分别给出精确算法和近似算法.
分析: 假如一个query是50byte, 那么100亿query就是5000亿byte也就是约等于500G,那么绝对会超出内存, 更加找不出来, 那么可以考虑一下哈希分割的思想.
首先就是A和B都将每个query的数据进行映射(i = Hahs(query) % 500); 然后映射到A0-A499/ B0-B499的小文件里面.最后Ai和BI找交集即可(Ai和Bi分别都插入setA和SetB,找交集).
那么又有一个小问题: 如果一个小文件的大小是10G内存还是不够捏?
可能有下面两种情况: 首先就是小文件里大多数是一个query, 还有就是小文件里面很多不同的query. 面对这两种情况我们都可以采用set里面解决, 为啥捏? 如果是情况一那么一定插入成功的只有第一次出现的,后面失败. 情况二的话不断插入set就会内存不足, 抛异常, 那么我们可以采取二次分割, 再找交集的方法.

(2) 给一个超过100G大小的log file, log里面存放IP地址, 找到ip地址出现最多的?
和上面类似, 也是将ip进行哈希映射, i = Hash(ip) % 100; 然后进入到映射的下标i的小文件里面, 相同的ip进入同一个小文件,最后用map统计出数据.

![<span style='color:red;'>详解</span>—[C++数据结构]—<span style='color:red;'>哈</span><span style='color:red;'>希</span> <<span style='color:red;'>哈</span><span style='color:red;'>希</span>表&&<span style='color:red;'>哈</span><span style='color:red;'>希</span>桶>](https://img-blog.csdnimg.cn/direct/ce1c8ac6b2ef48f4be66c884135b22ef.png)