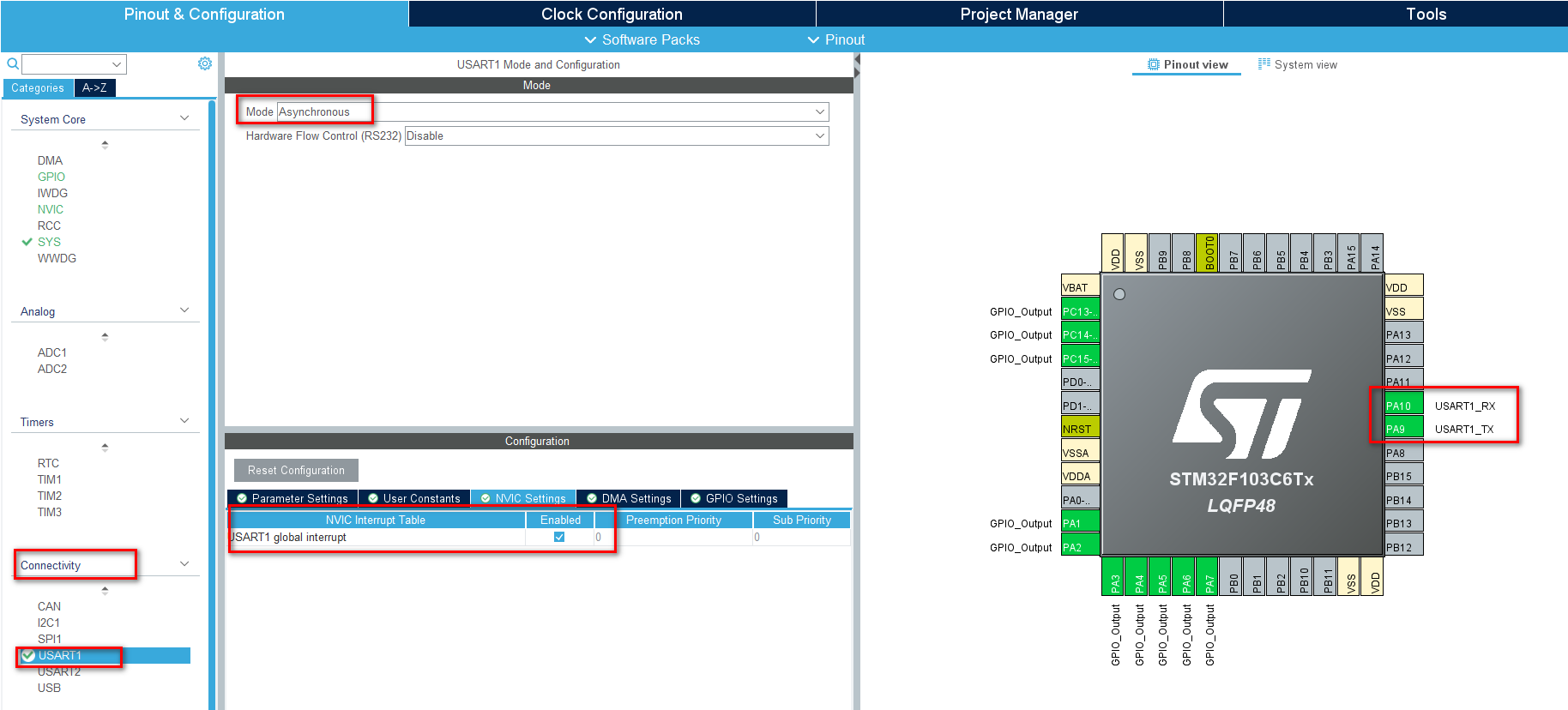
1. 串口初始化
void ShockWaveHandle_USART2Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
// RCC_APB1PeriphClockCmd: usart2 is hanging under APB1, only usart1 is hanging under APB2
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2 | RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; // TX3 - PB10 - ch1
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING; // RX3 - PB11 - ch1
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3;
GPIO_Init(GPIOA, &GPIO_InitStruct);
USART2_Configuration();
NVIC_InitStruct.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = PreemptionPriority_0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = SubPriority_1;
NVIC_Init(&NVIC_InitStruct);
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);
USART_Cmd(USART2, ENABLE);
}
2. 串口中断服务函数
void USART2_IRQHandler(void)
{
if (USART_GetITStatus(USART2, USART_IT_RXNE) != RESET)
{
uint8_t data;
data = USART_ReceiveData(USART2);
ch1_msg_rx(USART2, data);
}
}
3. 串口数据接收
void ch1_msg_rx(USART_TypeDef *USARTx, uint8_t receiveData)
{
UartMsgRecvHandler(USARTx, &ch1_msg[ch1_re], &ch1_re, receiveData);
}
void UartMsgRecvHandler(USART_TypeDef *USARTx, TUartMsg *ptUartMsg, uint16_t *rev, BYTE ucRecvDate)
{
if (FALSE == (ptUartMsg->ucRecvSta & RECV_FLG_HEAD1)) // Not receive first data (0x55)
{
ptUartMsg->ucRecvSta = 0; // set flag
if (DATA_HEAD_1 == ucRecvDate) // receive first data (0x55)
{
ptUartMsg->aucBuf[0] = DATA_HEAD_1;
ptUartMsg->ucRecvSta |= RECV_FLG_HEAD1;
}
}
else // 1. receive first data (0x55)
{
if (FALSE == (ptUartMsg->ucRecvSta & RECV_FLG_HEAD2)) // Not receive second data (0xAA)
{
if (DATA_HEAD_2 == ucRecvDate) // receive second data (0xAA)
{
ptUartMsg->aucBuf[1] = DATA_HEAD_2;
ptUartMsg->ucRecvSta |= RECV_FLG_HEAD2;
}
else
{
ptUartMsg->ucRecvSta = 0;
}
}
else // 2. receive second data (0xAA)
{
if (FALSE == (ptUartMsg->ucRecvSta & RECV_FLG_LEN)) // not receive third data (cmdLen)
{
if ((UART_LEN >= ucRecvDate) && (2 <= ucRecvDate)) // receive third data (cmdLen)
{
ptUartMsg->aucBuf[2] = ucRecvDate;
ptUartMsg->ucRecvSta |= RECV_FLG_LEN;
ptUartMsg->ucRecvCount = ucRecvDate + 5;
ptUartMsg->ucRecvIndex = 3;
}
else
{
ptUartMsg->ucRecvSta = 0;
}
}
else // 3. receive third data (cmdLen)
{
ptUartMsg->aucBuf[ptUartMsg->ucRecvIndex] = ucRecvDate; // 4. receive cmd data (payload)
ptUartMsg->ucRecvIndex++;
if ((ptUartMsg->ucRecvIndex >= ptUartMsg->ucRecvCount)) // 5. receive complete
{
ptUartMsg->bFlagRecv = TRUE;
ptUartMsg->ucRecvSta = 0;
ptUartMsg->USARTx = USARTx;
*rev += 1;
if (*rev >= UART_MSG_LEN)
{
*rev = 0;
}
}
else
{
ptUartMsg->bFlagRecv = FALSE;
}
}
}
}
}
4. 串口数据接收处理
static void ch1_PackageAnalyze(void)
{
cmd_TypeDef msg;
BYTE value;
taskENTER_CRITICAL();
msg.cmd_main = ch1_msg[ch1_prc].aucBuf[CMD1_ADDH];
msg.cmd_main <<= 8;
msg.cmd_main |= ch1_msg[ch1_prc].aucBuf[CMD1_ADDL]; // get main cmd
msg.cmd_type = ch1_msg[ch1_prc].aucBuf[CMDTYPE_ADD]; // cmd type high
msg.cmd_target = ch1_msg[ch1_prc].aucBuf[CMD2_ADD];
value = ch1_msg[ch1_prc].aucBuf[CMD3_VALUE_INDEX];
taskEXIT_CRITICAL();
// receive data format: [head1, head2, msg_len1, msg_len2, cmd_main1, cmd_main2, cmd_type, cmd_target, value, crc1, crc2]
switch (msg.cmd_main)
{
case CMD_31: // 0x06, 0x31
{
switch (msg.cmd_type)
{
case CMD_TYPE_SET: // 0x02
{
ShockWaveHandle_PowerCtrlAndSetParameterAndWorkingCtrl(CH1_UART, msg.cmd_target, value);
}
break;
case CMD_TYPE_ACK:
{
// TODO
}
break;
default:
{
// TODO
}
break;
}
}
break;
case CMD_32: // 0x06, 0x32, recevi handle shake packet or heart beat first packet
{
ShockWaveHandle_HandShakeAndHeartBeatPacketHandle(CH1_UART, msg.cmd_type, msg.cmd_target);
}
break;
case CMD_33: // 0x06, 0x33, receive heart beat seconde packet
{
// TODO
}
break;
default:
{
// TODO
}
break;
}
UartMsgRecvFlagClr(&ch1_msg[uart_msg_prc]);
}
void UartMsgRecvFlagClr(TUartMsg *ptUartMsg)
{
if(NULL == ptUartMsg)
{
return;
}
ptUartMsg->bFlagRecv = FALSE;
ptUartMsg->ucRecvSta = 0;
ptUartMsg->ucRecvCount = 0;
}





















![[大模型]Qwen-7B-Chat WebDemo](https://img-blog.csdnimg.cn/direct/568fd79bf1fe4e10ba83ff9bcf545de9.png#pic_center)