一、SRVO-050碰撞检测报警
[原因]检测出碰撞
[对策]
1.确认机器人是否碰撞。
2.确认是否正确进行了负载设定。
3.确认是否有过载、过度的加速度附加指令。
4.在长期停用后启动,或者外部气温较低时发生该报警。启动后,先短时间内低速运转设备,然后再恢复到正常的速度下使用。
5.确认从控制柜到机器人各轴电机之间的电机电缆、制动器电缆的各连接器是否松动。
6.确认输入电压是否为其控制柜的额定电压。
7.确认是否能够解除该轴的制动器。
二、SRVO-046OVC报警
[原因]伺服装置内部计算的均方根电流值超出了允许值
[对策]
1.确认负载、负载重量和惯量等是否超过额定值,并确认是否因过度的加速度附加指令而导致机器人动作过猛。
2.确认是否轴被推压或拉伸。
3.确认制动器电缆和连接器是否已经正确连接。
4.确认输入电压是否为其控制柜的额定电压。
5.确认是否能够解除该轴的制动器。
6.当附加轴上使用了制动器单元时,确认制动器单元的保险丝是否熔断。
7.可能是由于相关部件的故障所致。
(要解除该报警,必须要断电重启。)
三、SRVO-043DCAL报警
[原因]再生放电能量异常大,不能将能量作为热而完全放出。
[对策]
1.当加减速频率高或者重力轴处的再生能量大时发生此报警,应放宽使用条件。
2.可能是因为周围温度异常高,或再生电阻的冷却效率下降所致。
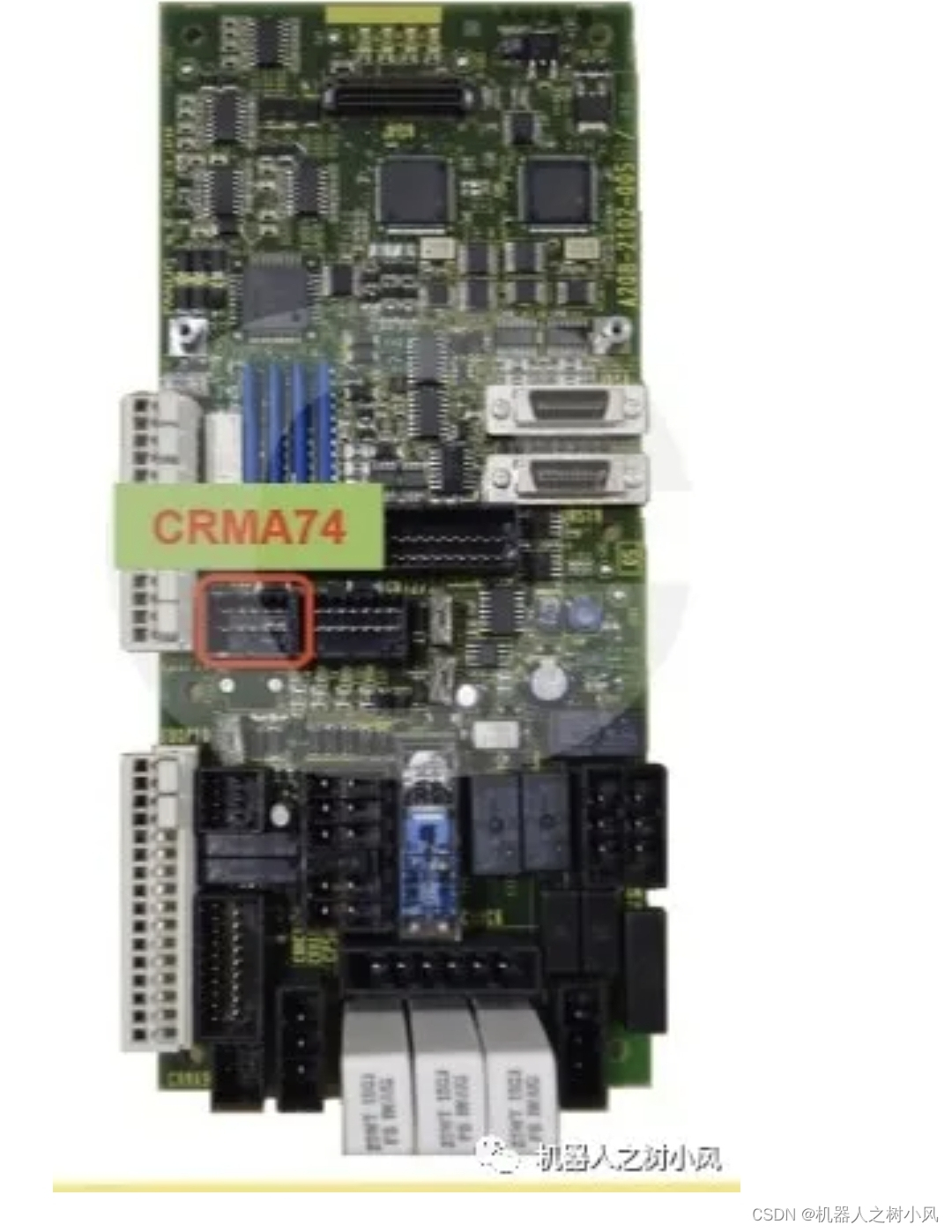
3.确认6轴伺服放大器内保险丝FS3是否熔断。
4.确认6轴伺服放大器上CRR63A、CRR63B连接器的连接。
5.确认6轴伺服放大器上CRRA11A、CRRA11B的连接。

6.更换6轴伺服放大器。
(要解除该报警,必须要断电重启。)
后期会继续更新报警代码,





























![【Leetcode | Python】48. 旋转图像 [数组][数学][矩阵]](https://img-blog.csdnimg.cn/direct/9a2bf0ef46c74dbb89349fd044fc6472.png)