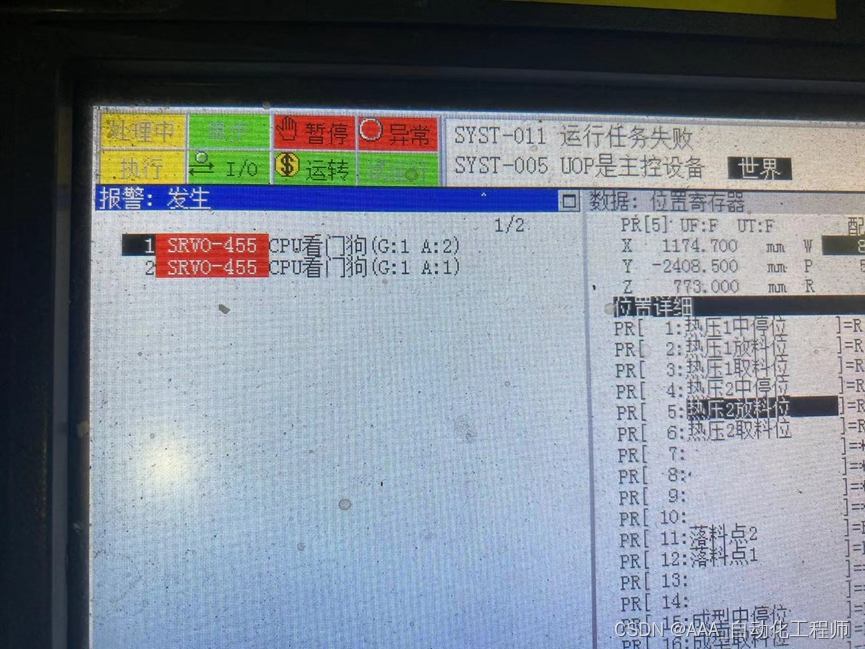
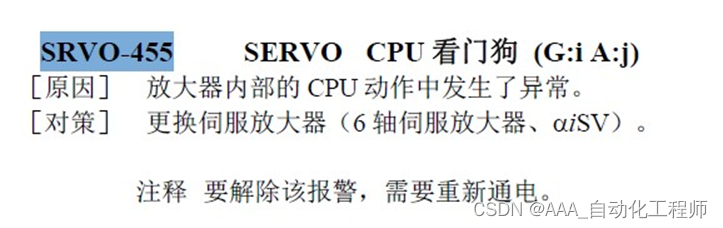
公司内的一台FANUC机器人(型号:M-900iB;控制柜型号:R-30iB)正常运转过程中突然报警:
按Reset键无法消除该报警;
由于现场没有备用的伺服放大器,所以只能尝试将控制柜断电处理;
重新给控制柜上电,SRVO-455报警消除;
重新启动机器人;
再次运行20分钟后,机器人再次报警,如下图所示: