FANUC机器人故障诊断中,有些报警代码,继续更新如下。
一、报警代码(SRVO-348)
SRVO-348DCS MCC关闭报警a,b
[原因]向电磁接触器发出了关闭指令,而电磁接触器尚未关闭。
[对策]
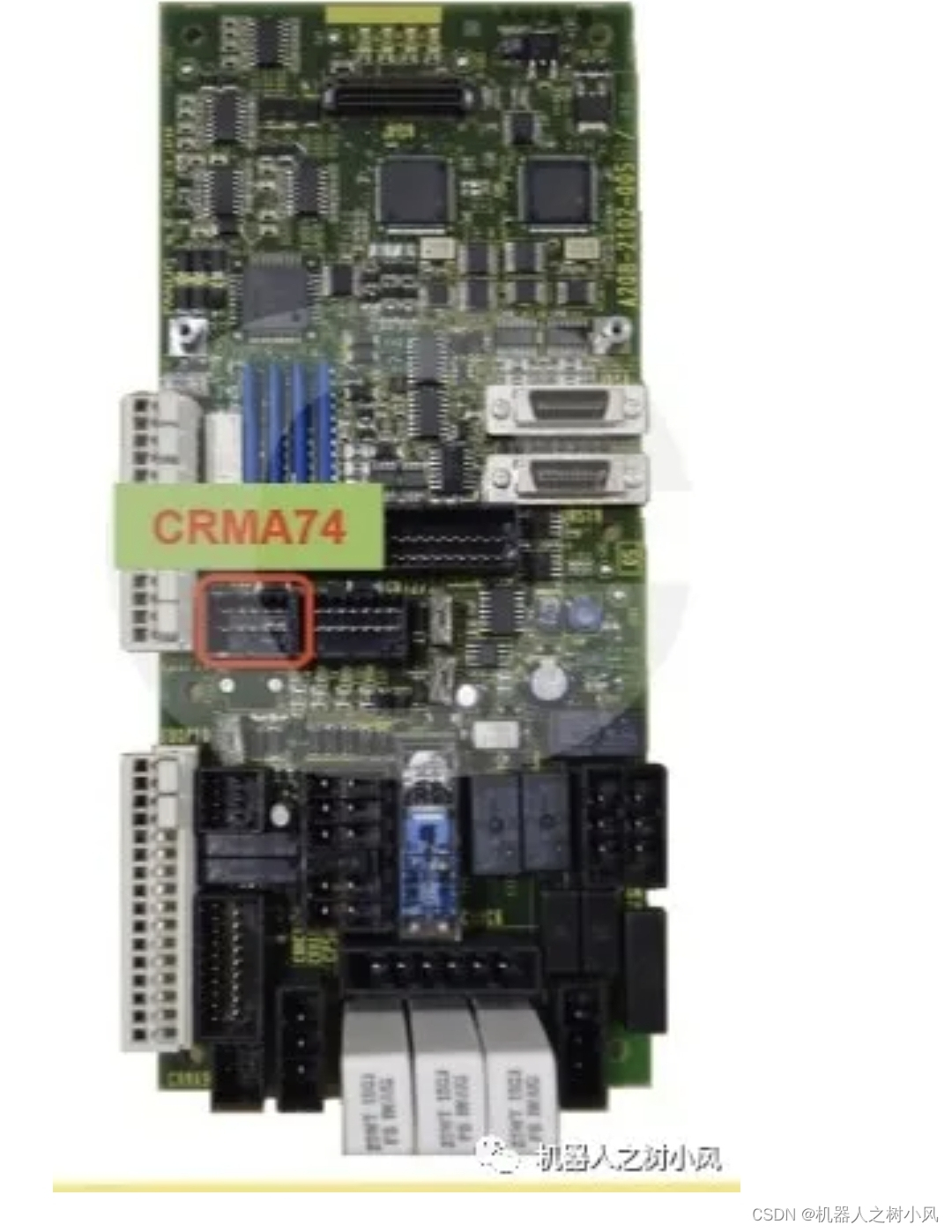
1.当急停单元上连接了CRMA74信号时,检查连接目的地是否有问题。

2.确认急停板上的保险丝(FUSE4) 。
3.更换急停单元。
(要消除该报警,必须要断电重启)
二、报警代码SRVO-230、SRVO-231
SRVO-230链1异常a,b
SRVO-231链1异常a,b
[原因]发生了双重化的安全信号不一致。
[对策]
1.在刚刚通电后发生报警的情况下,可能是由于示教器的规格不正确所致,请连接上正确的示教器。(该报警是针对R30i-A型号的控制柜,那个时期的示教器分单通道和双通道,如果通道和控制柜不匹配就会出现这个报警。对于R30i-B和R30i-B Plus控制柜可以忽略该报警。)
2.检查同时发生的报警,确认在哪个信号发生不一致。
后期会继续更新报警代码,欢迎交流补充。