智能驾驶中常用的速度计算算法包括基于GPS的速度计算、惯性测量单元(IMU)的速度计算、雷达测距的速度计算、视觉测距的速度计算等。这些算法可以单独使用或者结合使用,以提高速度计算的准确性和稳定性。
智能驾驶中常用的加速度计算算法包括:基于速度变化的方法、基于位移变化的方法、基于滤波器的方法(如卡尔曼滤波器)、基于机器学习的方法(如神经网络算法)等。这些算法可以通过传感器数据(如加速度计、陀螺仪等)来实时计算车辆的加速度,从而实现精准的驾驶控制和行为预测。
Yaw rate(偏航角速率)是指车辆或飞行器围绕垂直轴旋转的速率。偏航角速率的计算通常可以通过测量车辆或飞行器的转向角速度来实现。具体而言,偏航角速率可以通过以下公式计算:
Yaw rate = Vehicle speed * tan(steering angle) / Wheelbase
其中,
- Vehicle speed表示车辆的速度;
- steering angle表示车辆的转向角度;
- Wheelbase表示车辆的轴距。
通过这个公式,可以计算出车辆或飞行器的偏航角速率,从而帮助控制和导航系统更好地理解和响应车辆或飞行器的运动状态。
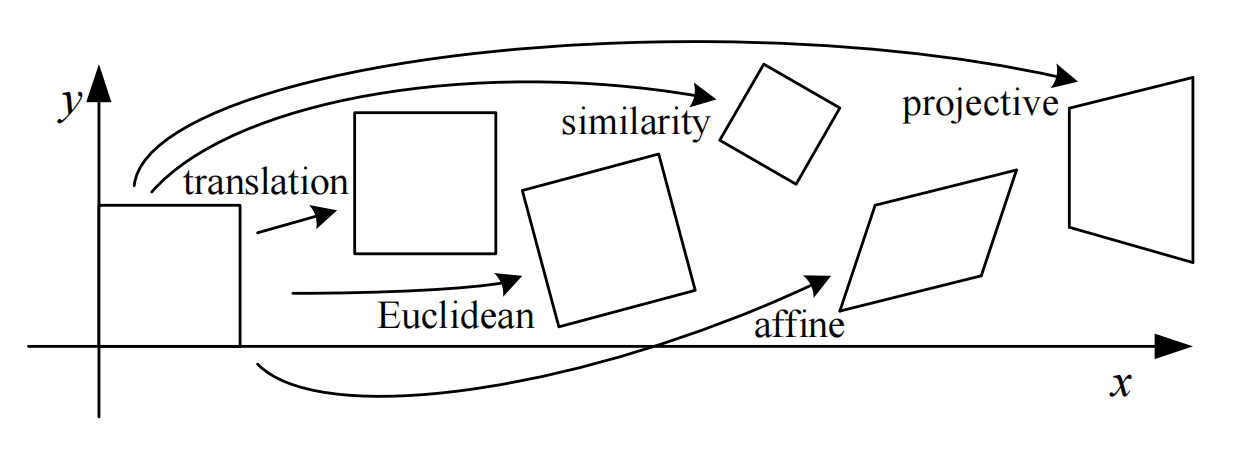
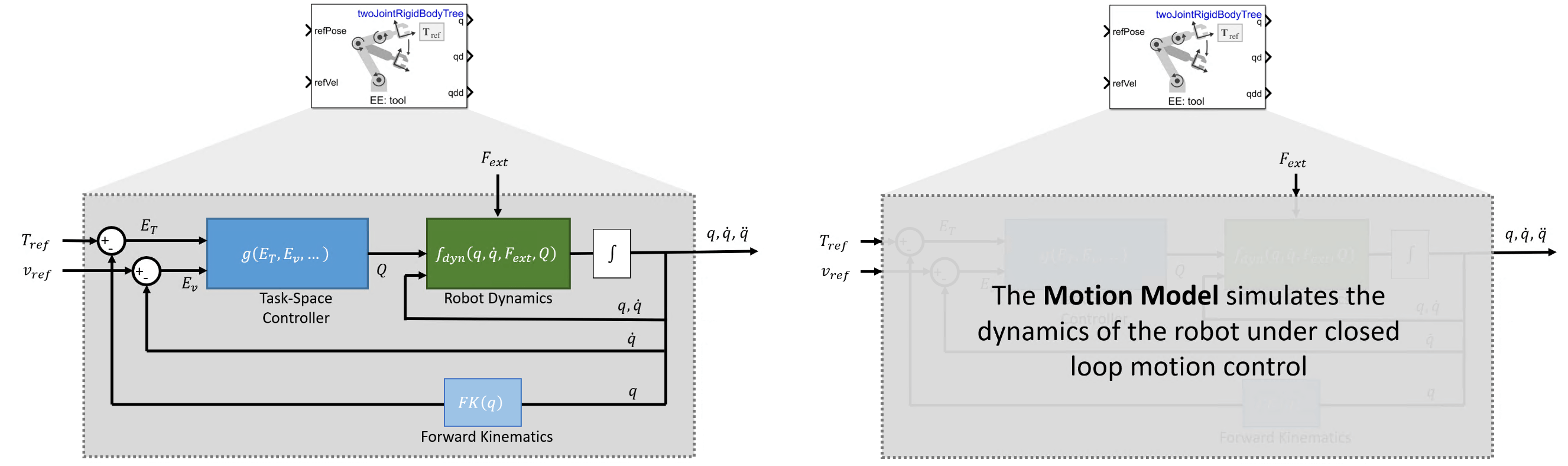
运动模型是描述物体在运动过程中位置、速度、加速度等物理量随时间变化的数学模型。常见的运动模型包括匀速直线运动模型、匀加速直线运动模型、抛体运动模型等。这些模型可以帮助我们预测物体在不同条件下的运动轨迹和状态。在工程、物理学和运动学等领域都广泛应用了运动模型来解决实际问题。