1、概要
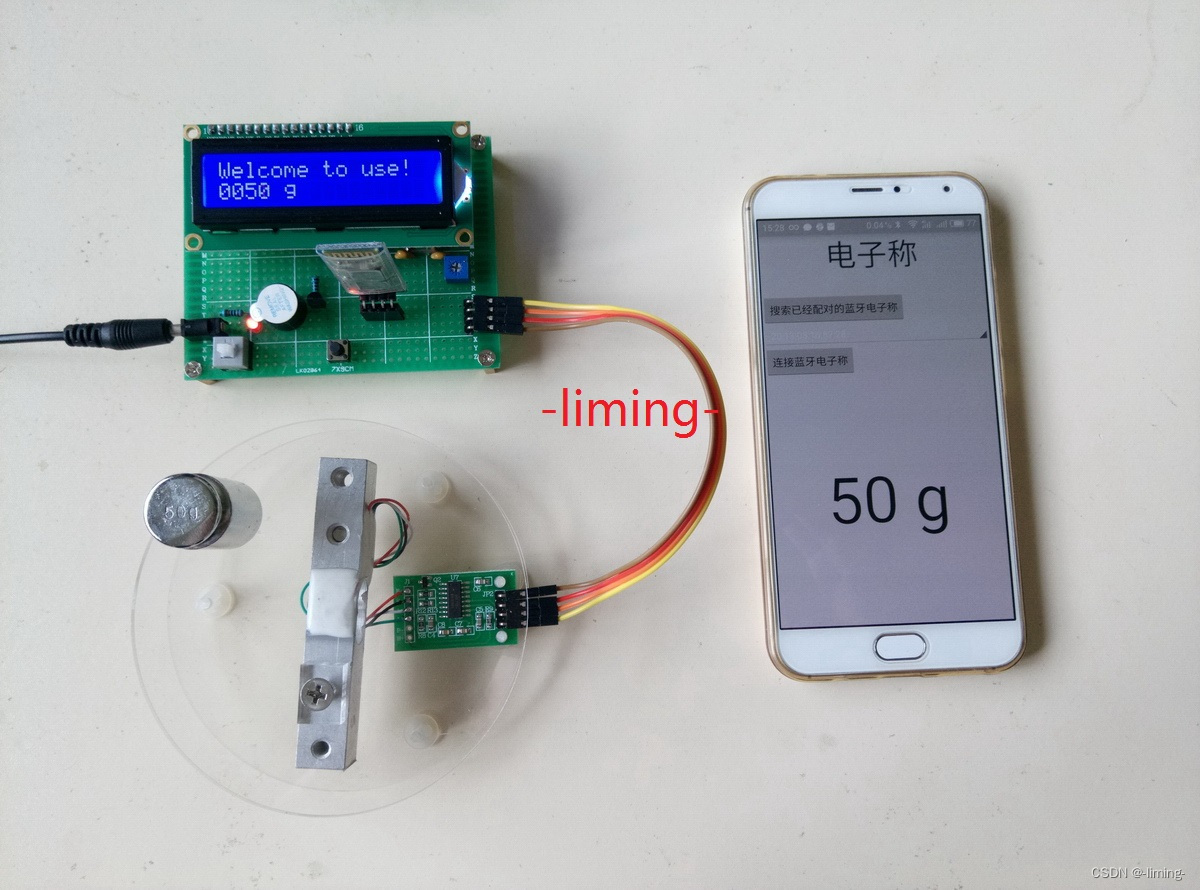
1、实现0~150KG的量程称量;
2、实时显示称量结果在1602上;
3、最小误差为0.01KG;
4、称量体重或物体时待结果稳定后,实现语音播报结果;
5、语音播报可手动关闭或打开;
6、由于传感器一致性差异,体重计算的系数可手动调节。
2、所用到的物料
1、STC89C52单片机
2、1602液晶
3、JQ8900-16P语音模块
4、HX711称重模块
5、洞洞板、下载线、晶振、电容、电阻、按键、排针等
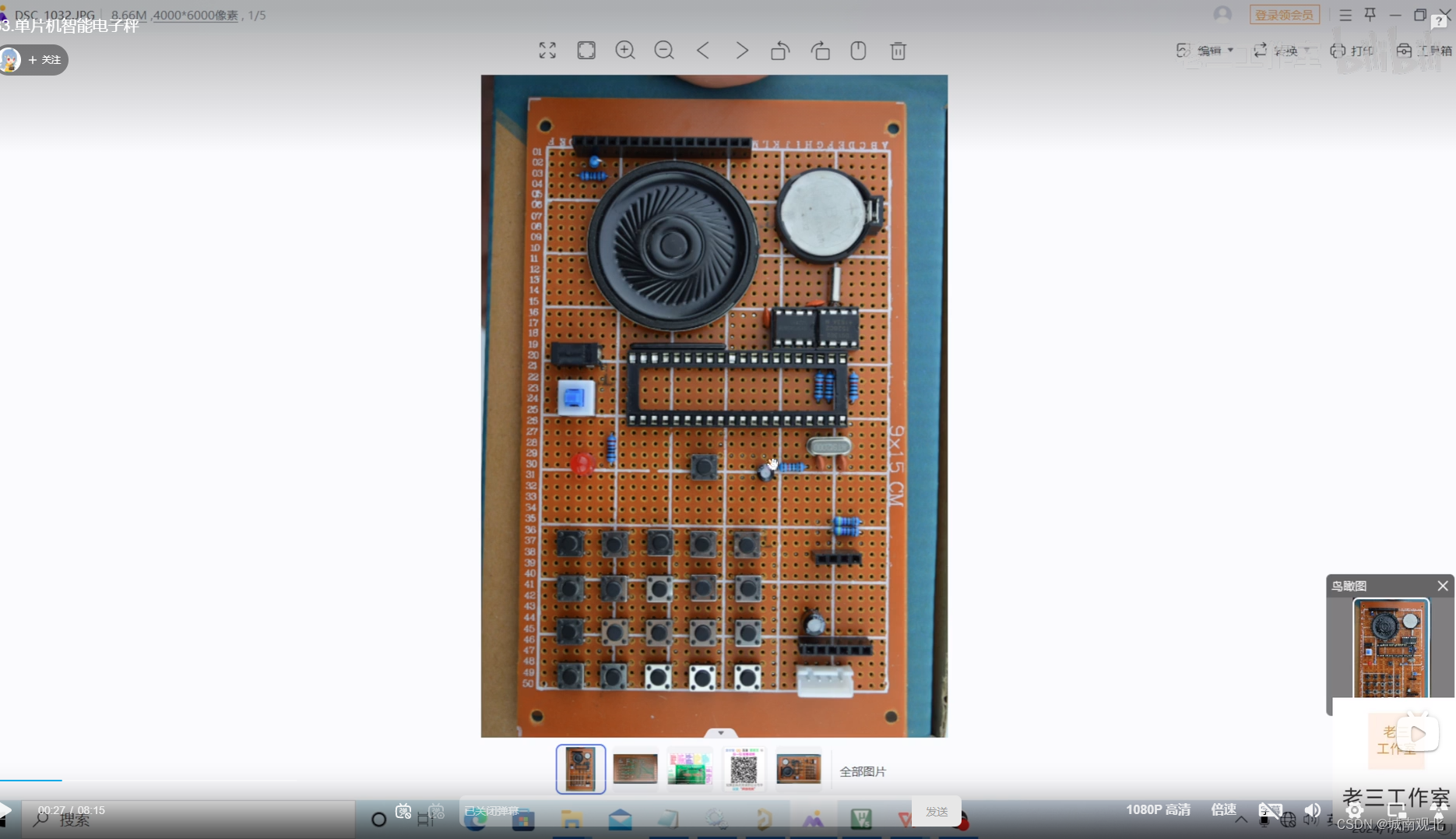
3、实物照片


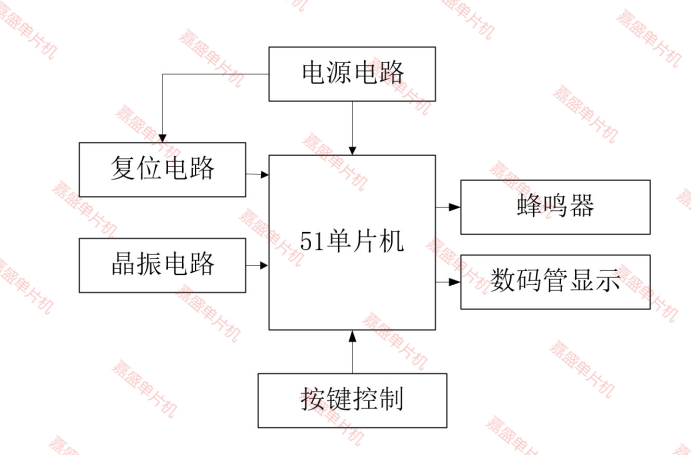
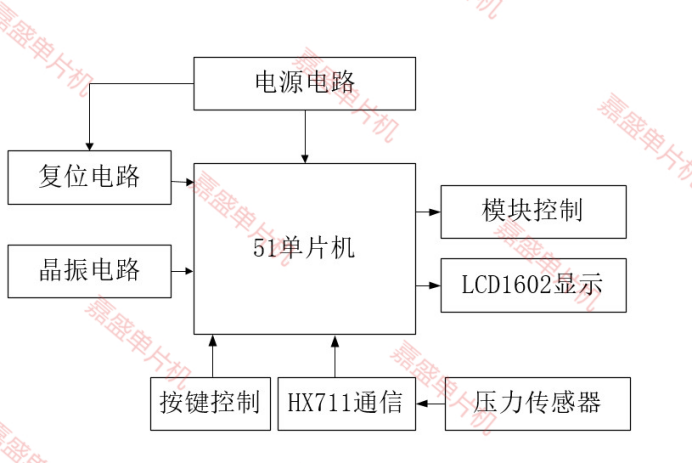
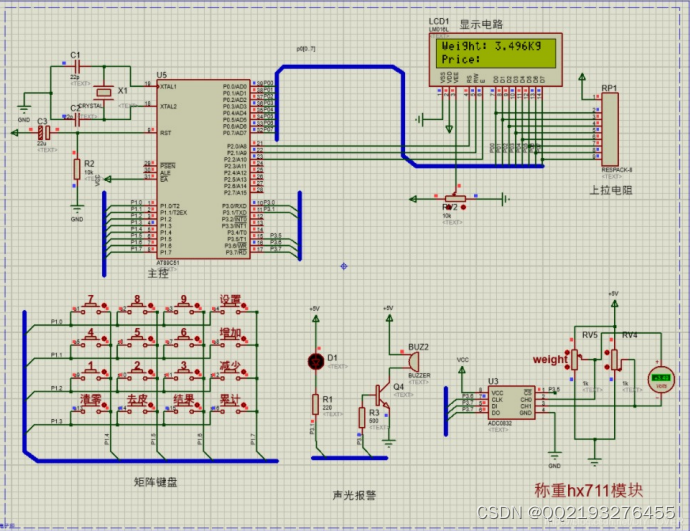
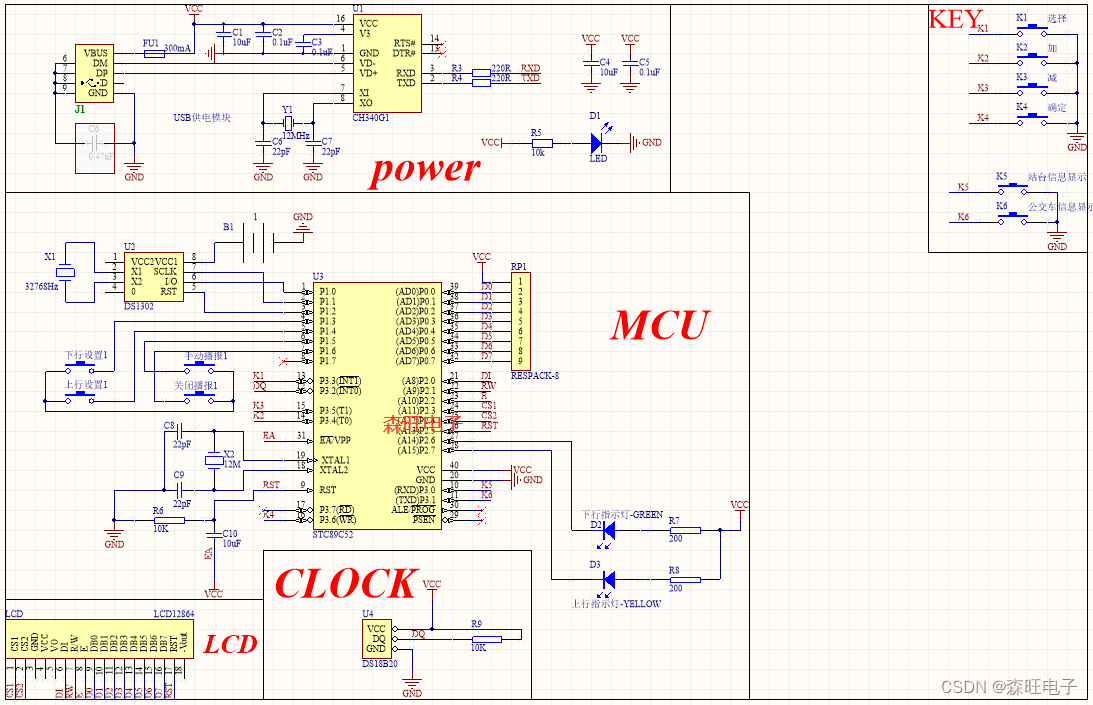
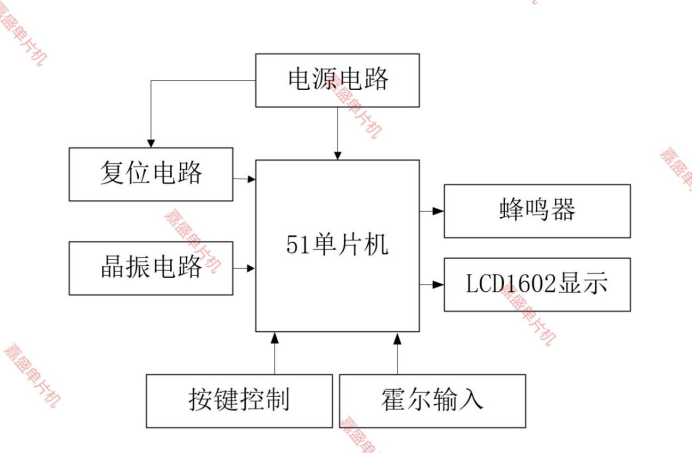
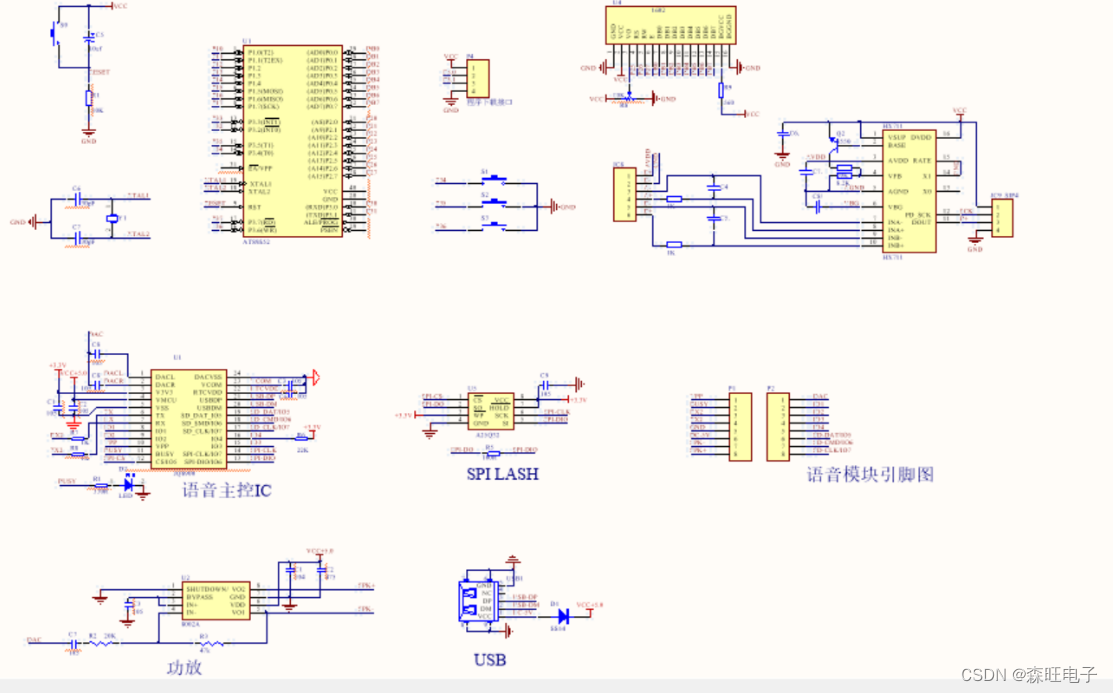
4、原理图
 5、模块使用说明
5、模块使用说明
JQ8900-16P 选用的是 SOC 方案,集成了一个 16 位的 MCU,以及一个专门针对音频解码的ADSP,采用硬解码的方式,更加保证了系统的稳定性和音质。小巧尺寸更加满足嵌入其它产品的需求。
SPI-flash 更换语音内容
此芯片最大的优势在于能够灵活的更换 SPI-flash 内的语音内容,省去了传统语音芯片需要安装上位机更换语音的麻烦,SPI FLASH 直接模拟成 U 盘,跟拷贝 U 盘一样,非常方便。使得产品研发和生产变得便捷简单。一线串口控制模式、RX232 串口控制可选,为研发提供更多的选择性。 USB 数据线连接芯片,插上电脑,电脑会自动识别。

6、程序
完整代码点击顶部链接下载
#include <reg52.H>
#define uchar unsigned char
#define uint unsigned int
#define PX_1602 P1
sbit RS =P3^2;
sbit RW =P3^3;
sbit E =P3^4;
/*sbit RS =P1^3;
sbit RW =P1^4;
sbit E =P1^5;*/
sbit kset =P2^0;
sbit kup =P2^2;
sbit kdown=P2^1;
sbit ADDO = P2^4;
sbit ADSK = P2^3;
sbit sda =P3^5;
sbit busy=P3^6;
uchar code str1[]={"Test weight: "};
uchar code str2[]={" 00.0Kg Voice"};
uchar code str11[]={"Welcome to use"};
uchar code str22[]={"Password:"};
uchar code set1[]={"Voice"};
uchar code set2[10]={" "};
unsigned long buf=0,maopi=0,shiwu=0,shiwu2=0,shiwu_buf=0,gu=84866;
uchar key,TSS,flag=0;
uint t;
int set_num,xishu=38;
double kg;
void ddelay(uint cnt)
{
while(cnt--);
}
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
void Delay1us (uint T )
{
while ( T-- );
}
void SendData (uchar addr)
{
uchar i;
EA = 0;
sda = 1;
Delay1us ( 1000 );
sda = 0;
Delay1us ( 420 );
for ( i = 0; i < 8; i++ )
{
sda = 1;
if ( addr & 0x01 )
{
Delay1us ( 300 );
sda = 0;
Delay1us ( 100 );
}
else
{
Delay1us ( 100 );
sda = 0;
Delay1us ( 300 );
}
addr >>= 1;
}
sda = 1;
EA = 1;//????
}
void WriteCMD(uchar command)
{
RS = 0;
RW = 0;
ddelay(20);
E = 1;
ddelay(20);
PX_1602 = command;
ddelay(30);
E = 0;
ddelay(50);
}
void WriteDAT(uchar dat)
{
RS = 1;
RW = 0;
ddelay(20);
E = 1;
ddelay(20);
PX_1602 = dat;
ddelay(30);
E = 0;
ddelay(50);
}
void init_1602()
{
uchar num;
E=0;
WriteCMD(0x38);
WriteCMD(0x38);
WriteCMD(0x0c);
WriteCMD(0x06);
WriteCMD(0x01);
WriteCMD(0x80);
for(num=0;num<16;num++)
{
WriteDAT(str1[num]);
//if(num==4){WriteCMD(0x80+4);WriteDAT(0xd0+15);}
delay(20);
}
WriteCMD(0x80+0x40);
for(num=0;num<16;num++)
{
WriteDAT(str2[num]);
delay(20);
}
delay(200); //yan shi 100us(12Mjingzheng)
}
void password()
{
uchar num,kk=1;
uchar ps1,ps2,ps3,ps4,ps5,ps6,ps7;
E=1;
WriteCMD(0x38);
WriteCMD(0x38);
WriteCMD(0x0c);
WriteCMD(0x06);
WriteCMD(0x01);
WriteCMD(0x80);
for(num=0;num<14;num++)
{
WriteDAT(str11[num]);
delay(20);
}
WriteCMD(0x80+0x40);
for(num=0;num<9;num++)
{
WriteDAT(str22[num]);
delay(20);
}
delay(200); //yan shi 100us(12Mjingzheng)
WriteCMD(0x80+0x49);
WriteCMD(0x0f);
while(1)
{
if(kset==0)
{
delay(10);
if(kset==0)
{
kk++;
while(kset==0);
WriteCMD(0x0f);
switch (kk)
{
case 1 : WriteCMD(0x80+0x49); break;
case 2 : WriteCMD(0x80+0x4a); break;
case 3 : WriteCMD(0x80+0x4b); break;
case 4 : WriteCMD(0x80+0x4c); break;
case 5 : WriteCMD(0x80+0x4d); break;
case 6 : WriteCMD(0x80+0x4e); break;
case 7 : WriteCMD(0x80+0x4f); break;
case 8 : kk=1;WriteCMD(0x80+0x49); break;
}
}
}
if(kk==1)
{
if(ps1==2&&ps2==0&&ps3==1&&ps4==8&&ps5==6&&ps6==6&&ps7==6)break;
if(kup==0)
{
delay(100);
if(kup==0)
{
if(kdown==0)break;
ps1++;if(ps1>=10)ps1=0;
WriteCMD(0x80+0x49);
WriteDAT(0x30+ps1);
WriteCMD(0x80+0x49);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(kup==0)break;
if(ps1>0)ps1--;
else ps1=9;
WriteCMD(0x80+0x49);
WriteDAT(0x30+ps1);
WriteCMD(0x80+0x49);
WriteCMD(0x0e);
}
}
}
if(kk==2)
{
if(kup==0)
{
delay(100);
if(kup==0)
{
ps2++;if(ps2>=10)ps2=0;
WriteCMD(0x80+0x4a);
WriteDAT(0x30+ps2);
WriteCMD(0x80+0x4a);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(ps2>0)ps2--;
else ps2=9;
WriteCMD(0x80+0x4a);
WriteDAT(0x30+ps2);
WriteCMD(0x80+0x4a);
WriteCMD(0x0e);
}
}
}
if(kk==3)
{
if(kup==0)
{
delay(100);
if(kup==0)
{
ps3++;if(ps3>=10)ps3=0;
WriteCMD(0x80+0x4b);
WriteDAT(0x30+ps3);
WriteCMD(0x80+0x4b);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(ps3>0)ps3--;
else ps3=9;
WriteCMD(0x80+0x4b);
WriteDAT(0x30+ps3);
WriteCMD(0x80+0x4b);
WriteCMD(0x0e);
}
}
}
if(kk==4)
{
if(kup==0)
{
delay(100);
if(kup==0)
{
ps4++;if(ps4>=10)ps4=0;
WriteCMD(0x80+0x4c);
WriteDAT(0x30+ps4);
WriteCMD(0x80+0x4c);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(ps4>0)ps4--;
else ps4=9;
WriteCMD(0x80+0x4c);
WriteDAT(0x30+ps4);
WriteCMD(0x80+0x4c);
WriteCMD(0x0e);
}
}
}
if(kk==5)
{
if(kup==0)
{
delay(100);
if(kup==0)
{
ps5++;if(ps5>=10)ps5=0;
WriteCMD(0x80+0x4d);
WriteDAT(0x30+ps5);
WriteCMD(0x80+0x4d);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(ps5>0)ps5--;
else ps5=9;
WriteCMD(0x80+0x4d);
WriteDAT(0x30+ps5);
WriteCMD(0x80+0x4d);
WriteCMD(0x0e);
}
}
}
if(kk==6)
{
if(kup==0)
{
delay(100);
if(kup==0)
{
ps6++;if(ps6>=10)ps6=0;
WriteCMD(0x80+0x4e);
WriteDAT(0x30+ps6);
WriteCMD(0x80+0x4e);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(ps6>0)ps6--;
else ps6=9;
WriteCMD(0x80+0x4e);
WriteDAT(0x30+ps6);
WriteCMD(0x80+0x4e);
WriteCMD(0x0e);
}
}
}
if(kk==7)
{
if(kup==0)
{
delay(100);
if(kup==0)
{
ps7++;if(ps7>=10)ps7=0;
WriteCMD(0x80+0x4f);
WriteDAT(0x30+ps7);
WriteCMD(0x80+0x4f);
WriteCMD(0x0e);
}
}
if(kdown==0)
{
delay(100);
if(kdown==0)
{
if(ps7>0)ps7--;
else ps7=9;
WriteCMD(0x80+0x4f);
WriteDAT(0x30+ps7);
WriteCMD(0x80+0x4f);
WriteCMD(0x0e);
}
}
}
}
}
/*void write_kg(unsigned long date)
{
unsigned long shi,ge,bai,qian;
if(date>9999)date=9999;
qian=date/1000;
bai=date%1000/100;
shi=date%100/10;
ge=date%10;
WriteCMD(0x80+0x42);
WriteDAT(0x30+qian);
WriteDAT(0x30+bai);
WriteDAT(0x30+shi);
WriteDAT(0x30+ge);
}*/
void write_kgg(unsigned long date)
{
unsigned long shi,ge,bai;
if(date>99999)date=99999;
(unsigned long)date=(float)date/100;
bai=date/100;
shi=date%100/10;
ge=date%10;
WriteCMD(0x80+0x43);
WriteDAT(0x30+bai);
WriteDAT(0x30+shi);
WriteCMD(0x80+0x46);
WriteDAT(0x30+ge);
}
void write_n(uint date)
{
uchar shi,ge,bai;
bai=date/100;
shi=date%100/10;
ge=date%10;
WriteCMD(0x8d);
WriteDAT(0x30+bai);
WriteDAT(0x30+shi);
WriteDAT(0x30+ge);
}
void write_xishu(uint date)
{
uchar shi,ge;
shi=date/10;
ge=date%10;
WriteCMD(0x80+0x40);
WriteDAT(0x30+shi);
WriteDAT(0x30+ge);
}
void delay_us(uint z)
{
while(z--);
}
/*unsigned long get_kg(void)
{
unsigned long Count;
unsigned char i;
ADDO=1;
delay_us(2);
ADSK=0; //使能AD(PD_SCK 置低)
Count=0;
while(ADDO); //AD转换未结束则等待,否则开始读取
for (i=0;i<24;i++)
{
ADSK=1; //PD_SCK 置高(发送脉冲)
Count=Count<<1; //下降沿来时变量Count左移一位,右侧补零
ADSK=0; //PD_SCK 置低
if(ADDO)
Count++;
}
ADSK=1;
Count=Count^0x800000;//第25个脉冲下降沿来时,转换数据
delay_us(2);
ADSK=0;
shiwu=Count/100-gu;
//shiwu=(unsigned int)((float)shiwu/4.22+0.05);
return(shiwu);
}*/
unsigned long hx711_read(void)
{
unsigned long Count;
unsigned char i;
ADDO=1;
delay_us(2);
ADSK=0; //使能AD(PD_SCK 置低)
Count=0;
while(ADDO); //AD转换未结束则等待,否则开始读取
for (i=0;i<24;i++)
{
ADSK=1; //PD_SCK 置高(发送脉冲)
Count=Count<<1; //下降沿来时变量Count左移一位,右侧补零
ADSK=0; //PD_SCK 置低
if(ADDO)
Count++;
}
ADSK=1;
Count=Count^0x800000;//第25个脉冲下降沿来时,转换数据
delay_us(2);
ADSK=0;
return(Count);
}
void get_maopi()
{
buf=hx711_read();
maopi=buf/100;
}
void gei_weight()
{
// uint n;
buf=hx711_read();
buf=buf/100;
if(buf>maopi)
{
shiwu=buf-maopi;
shiwu=(unsigned long)((double)shiwu*xishu/10.0);
//shiwu=(unsigned int)((float)shiwu/3.0+0.05); //需要矫正4.22数值
}
if(shiwu>99000||buf<maopi-30)
{
write_n(999);
while(1);
}
//shiwu-=(gu/10);
}
void scankey()
{
uchar num;
if(kset==0)
{
delay(10);
if(kset==0)
{
key++;
while(kset==0);
write_xishu(xishu);
switch (key)
{
case 1 : WriteCMD(0x80+0x4f);WriteCMD(0x0f); break;
case 2 : WriteCMD(0x80+0x41); break;
case 3 : WriteCMD(0x80+0x40);
for(num=0;num<5;num++)
{
WriteDAT(set2[num]);
delay(20);
}key=0; WriteCMD(0x0c);break;
}
}
}
if(key==1)
{
if(kup==0)
{
delay(10);
if(kup==0)
{
set_num++;if(set_num>=2)set_num=0;
while(!kup);
WriteCMD(0x80+0x4b);
for(num=0;num<5;num++)
{
if(set_num==0)
{WriteDAT(set1[num]);flag=1;}
if(set_num==1)
{WriteDAT(set2[num]);flag=0;}
delay(20);
}
WriteCMD(0x80+0x4f);
WriteCMD(0x0f);
}
}
if(kdown==0)
{
delay(10);
if(kdown==0)
{
set_num--;if(set_num<0)set_num=1;
while(!kdown);
WriteCMD(0x80+0x4b);
for(num=0;num<5;num++)
{
if(set_num==0)
{WriteDAT(set1[num]);flag=1;}
if(set_num==1)
{WriteDAT(set2[num]);flag=0;}
delay(20);
}
WriteCMD(0x80+0x4f);
WriteCMD(0x0f);
}
}
}
if(key==2)
{
if(kup==0)
{
delay(10);
if(kup==0)
{
xishu++;if(xishu>=99)xishu=0;
write_xishu(xishu);
WriteCMD(0x80+0x41);
WriteCMD(0x0f);
}
}
if(kdown==0)
{
delay(10);
if(kdown==0)
{
xishu--;if(xishu<0)xishu=99;
write_xishu(xishu);
WriteCMD(0x80+0x41);
WriteCMD(0x0f);
}
}
}
}
void bobao()
{
uint buff;
uchar ge,shi,bai;