一、FANUC机器人寄存器变量
在位置寄存器中存储需要用到的3个位置寄存器变量,分别是原点位、笛卡尔姿态、关节姿态。

二、创建回原点TP程序
在程序创建页面创建回原点的TP程序go_home,之后进入该程序进行程序的编写。

三、添加对应的编程指令
首先获取机器人当前位置的笛卡尔坐标和关节坐标
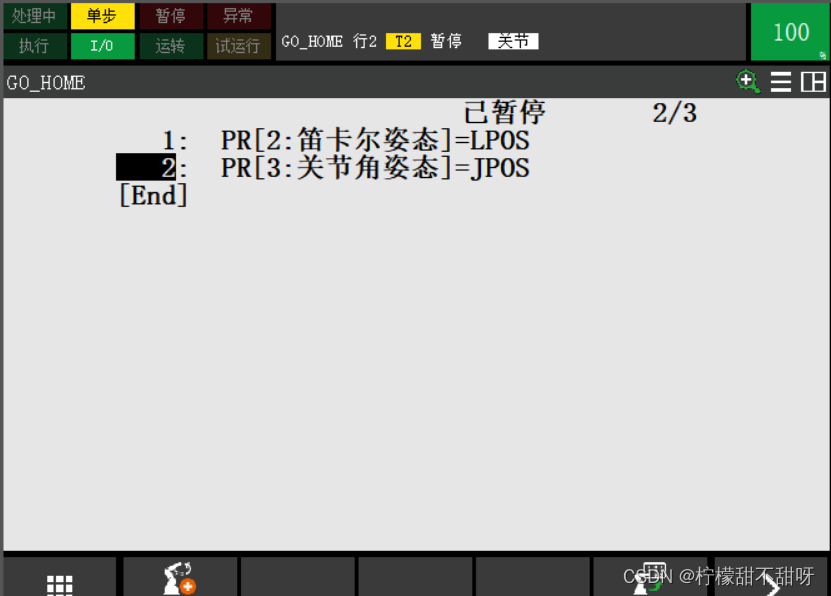
设定一个初始高度,并赋值给位置寄存器PR[2]的Z轴。
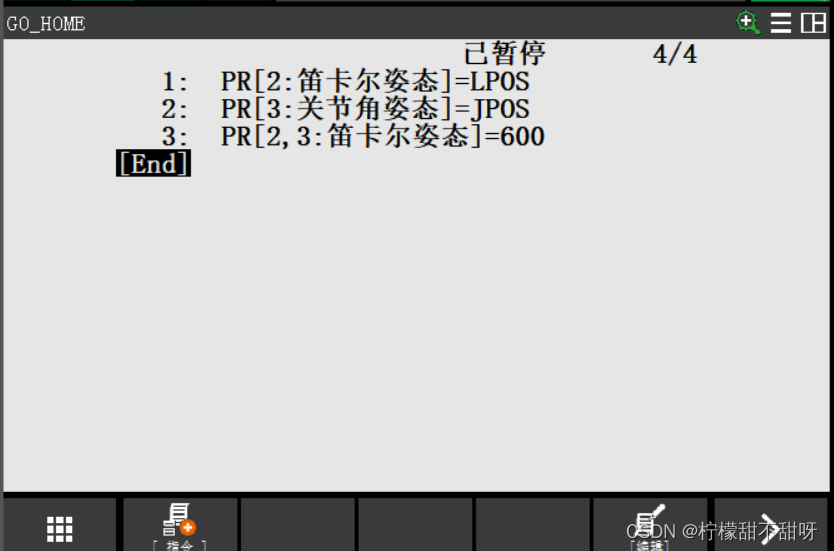
将机器人线性运动到该点位
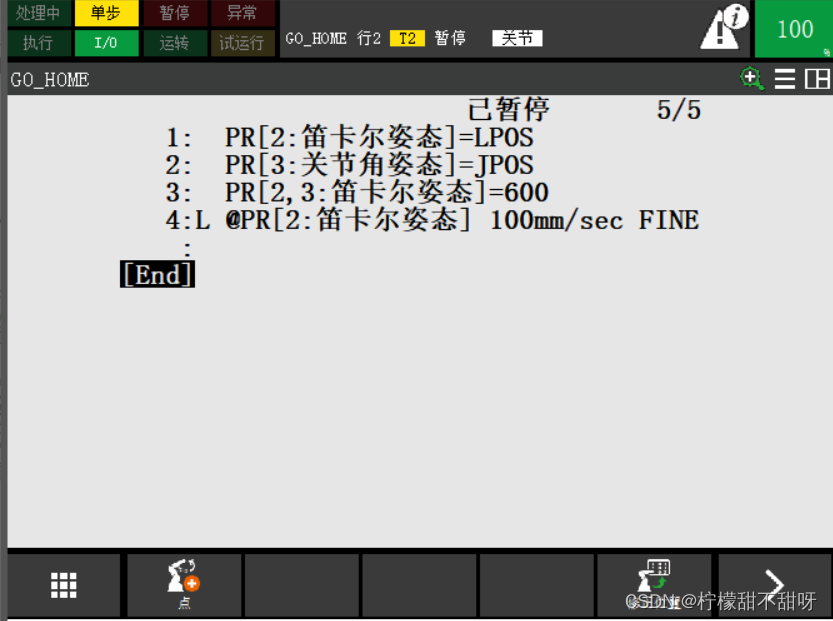
释放机器人所需要释放的关节角度,本篇章以235轴为例,并单步按关节运动移动机器人的单轴。

最后将机器人关节运动至示教的原点位置PR[1]点
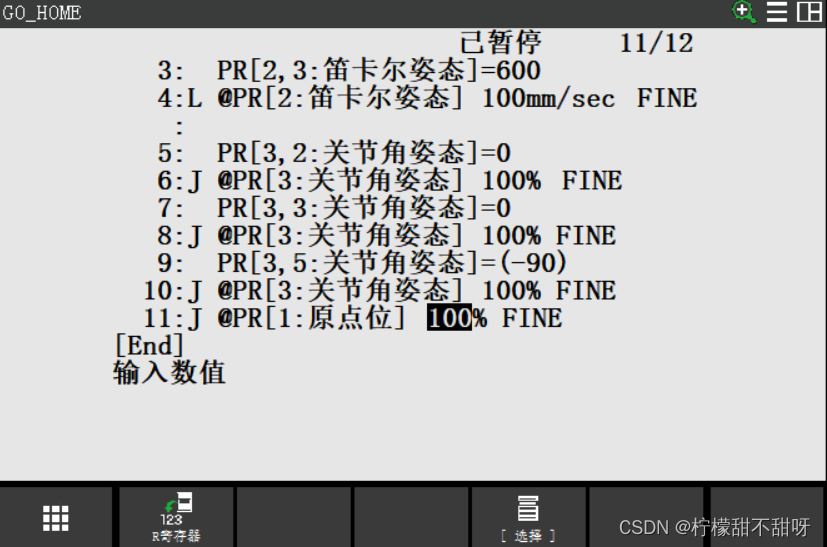
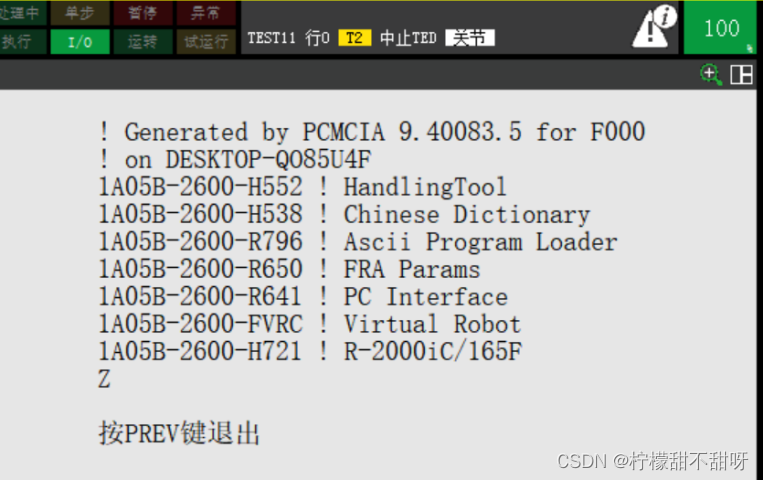
回原点的总体程序如下,根据不同工况进行对应的调整



























![[Qt学习笔记]Qt下使用Halcon实现采图时自动对焦的功能(Brenner梯度法)](https://img-blog.csdnimg.cn/img_convert/1c26a5e4aa537fcb027bc876fb7a65b7.webp?x-oss-process=image/format,png)