基于深度学习的车辆检测技术是现代智能交通系统的重要组成部分,它利用计算机视觉和机器学习算法,特别是深度学习模型,来识别和定位图像或视频中的车辆。这项技术广泛应用于自动驾驶、交通监控、违章抓拍等多个领域。
深度学习车辆检测技术的关键组件
- 卷积神经网络(CNNs): 卷积神经网络是深度学习车辆检测中常用的网络结构,它能够从原始图像中自动学习到 hierarchical feature representations,即层次化的特征表示。
- 区域提议网络(RPNs): RPNs 用于在图像中提议可能包含车辆的区域,这样可以减少搜索空间,提高检测效率。
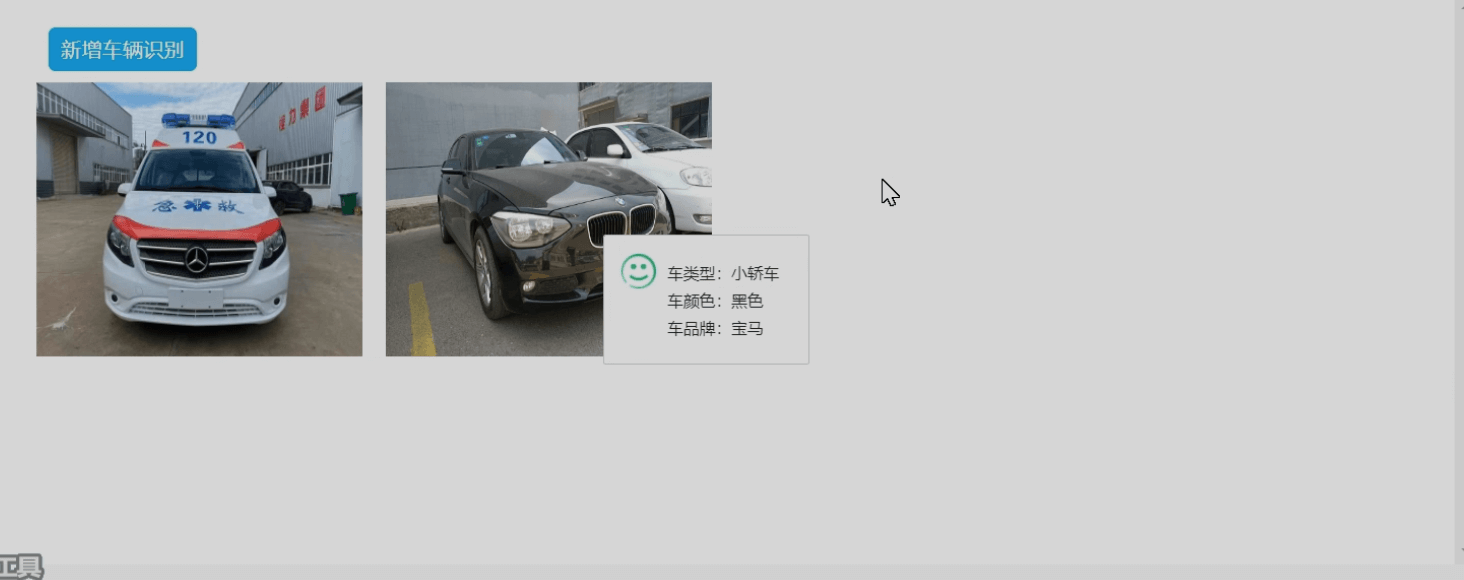
- 语义分割网络: 这类网络不仅可以检测车辆,还可以对车辆进行分类,如区分不同类型的车辆。
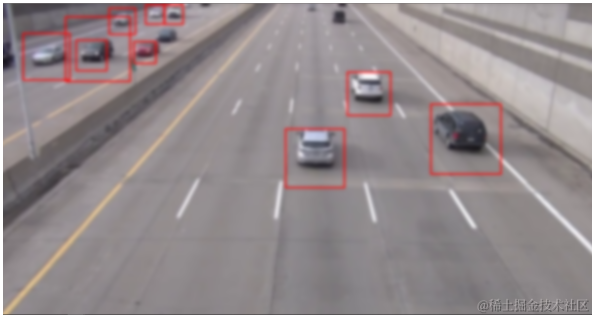
- 检测网络: 如Faster R-CNN, YOLO (You Only Look Once), SSD (Single Shot MultiBox Detector)等,这些网络结合了CNNs和RPNs的特点,能够对图像中的车辆进行定位和分类。
技术流程
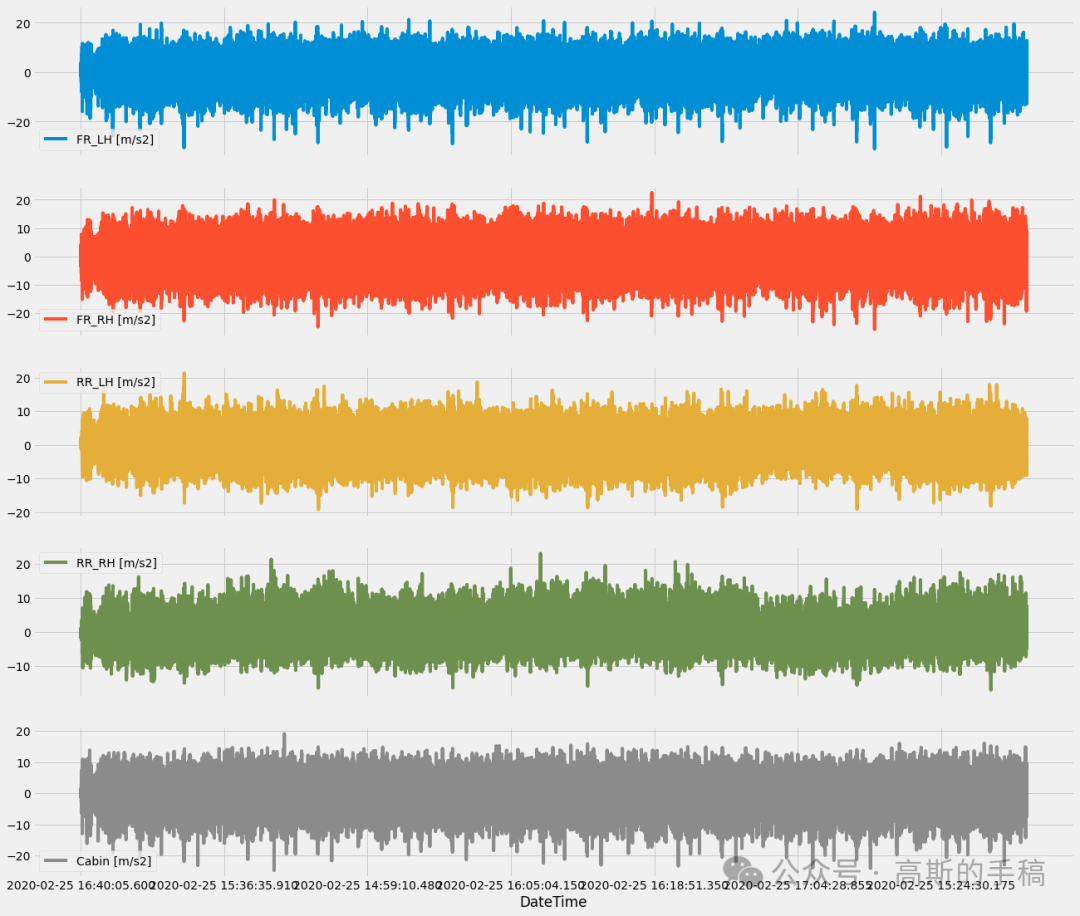
- 数据收集与预处理: 首先,收集大量的车辆图像,并对这些图像进行标注,包括车辆的位置、大小、类型等。预处理阶段可能包括缩放、裁剪、标准化等操作。
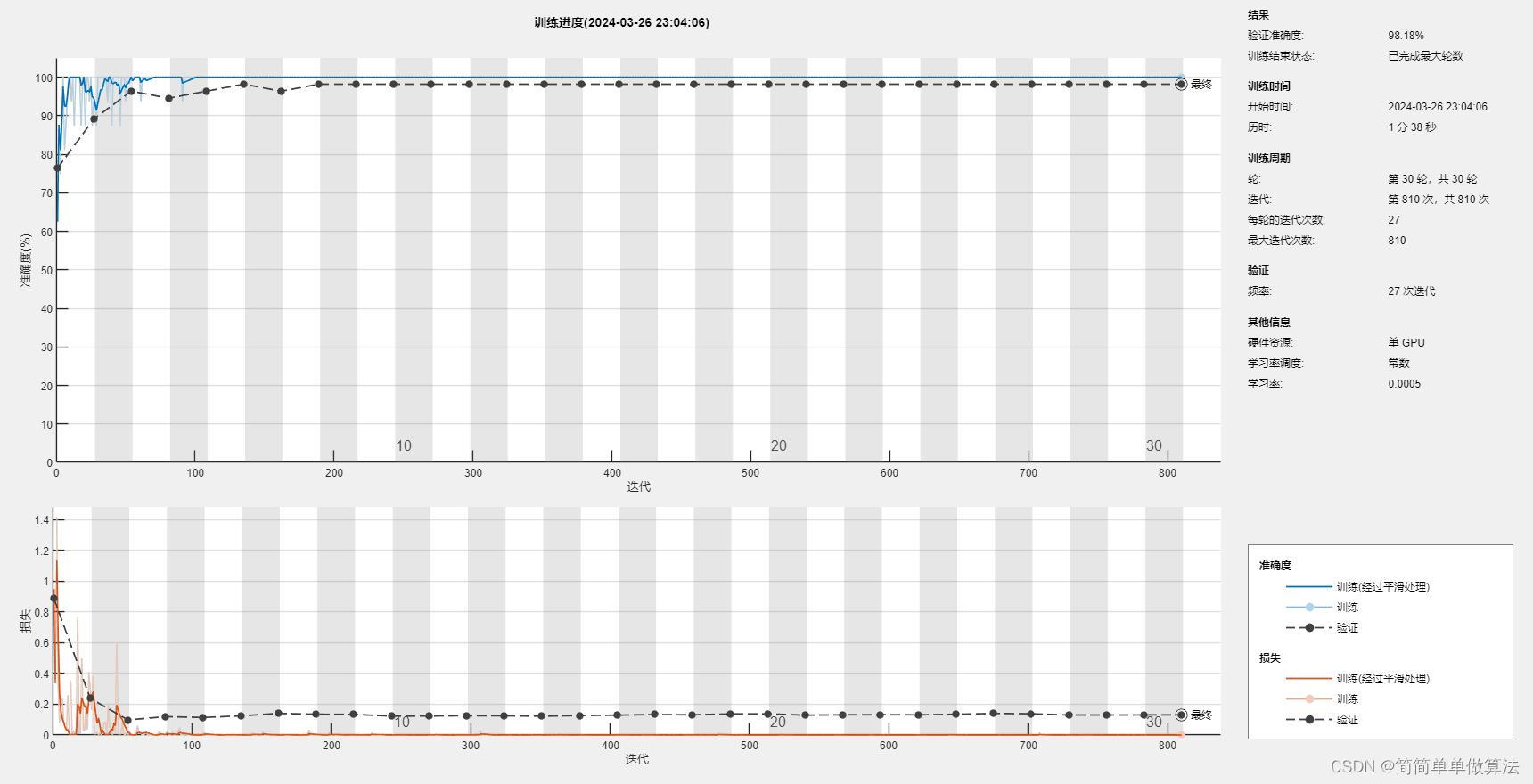
- 模型训练: 使用标注好的数据来训练深度学习模型。这一步骤需要强大的计算资源,并且可能需要数小时到数天的时间,具体取决于模型的复杂度和训练数据的数量。
- 模型验证与测试: 在独立的验证集和测试集上评估模型的性能,使用诸如精确度(Accuracy)、召回率(Recall)、精确率(Precision)、F1分数等指标。
- 模型部署: 将训练好的模型部署到实际应用中,如交通监控摄像头或自动驾驶车辆的传感器系统中。
应用挑战
- 光照和天气变化: 不同光照条件、天气状况下车辆的外观会有很大差异,这对检测算法提出了挑战。
- 车型多样性: 车辆种类繁多,形状和颜色各异,如何准确识别各种车型是技术上的难点。
- 遮挡问题: 车辆检测系统需要能够处理部分或完全遮挡的情况。
- 实时性能: 在自动驾驶等应用中,车辆检测需要实时完成,这对算法的速度有严格要求。
发展趋势
- 模型轻量化: 为了适应移动设备和边缘计算平台,研究者正在开发更轻量级的模型。
- 多模态学习: 结合图像、视频、声音等多种数据模态,以提高检测的准确性和鲁棒性。
- 联邦学习: 为了保护隐私,研究者正在探索联邦学习框架,在分布式网络中训练模型而不共享数据。
基于深度学习的车辆检测技术正不断发展,其准确度和效率的提升将进一步提升智能交通系统的性能,为人们的出行安全提供更加有力的保障。