目录
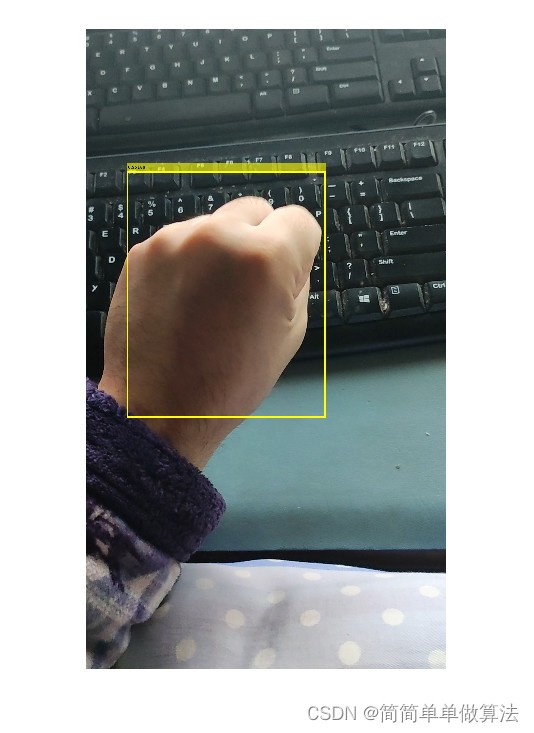
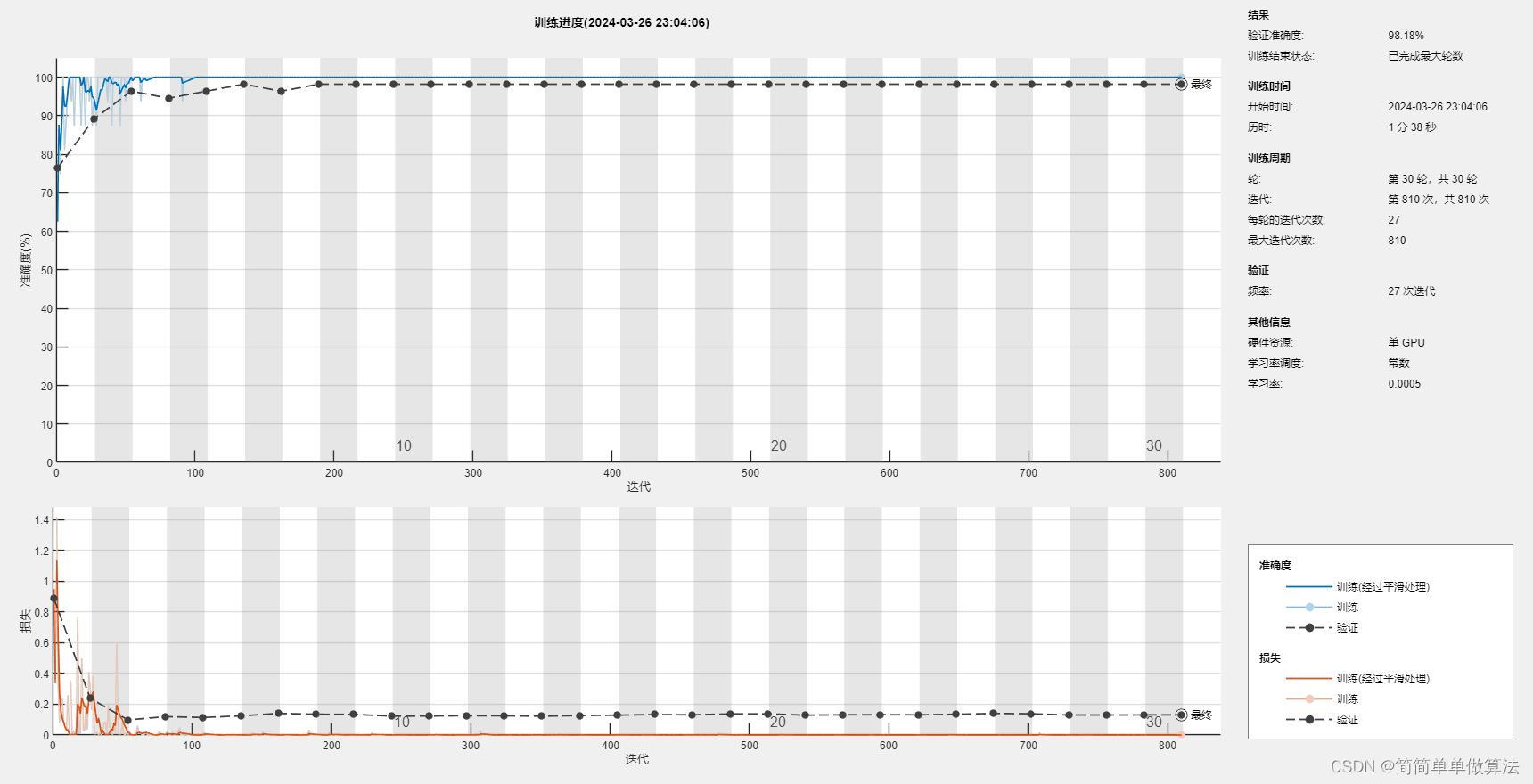
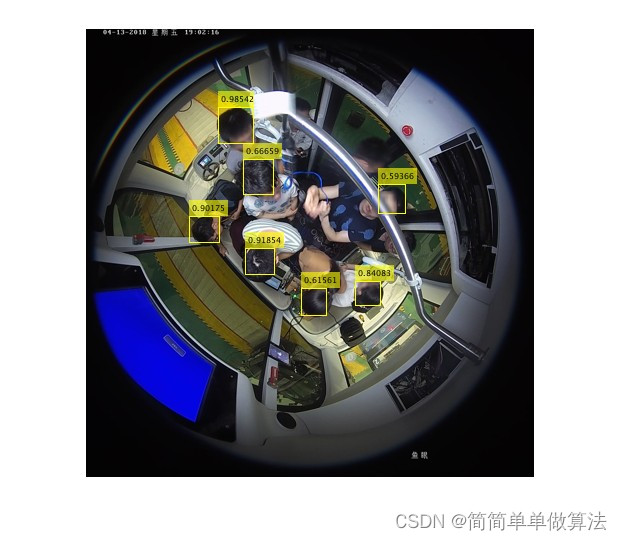
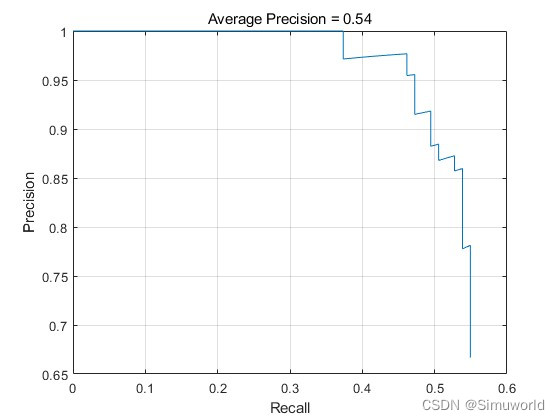
1.算法运行效果图预览









2.算法运行软件版本
MATLAB2022a
3.部分核心程序
load yolov2.mat% 加载训练好的目标检测器
img_size= [224,224];
imgPath = 'test/'; % 图像库路径
imgDir = dir([imgPath '*.jpg']); % 遍历所有jpg格式文件
cnt = 0;
for i = 1:length(imgDir) % 遍历结构体就可以一一处理图片了
i
figure
img = imread([imgPath imgDir(i).name]); %读取每张图片
I = imresize(img,img_size(1:2));
[bboxes,scores] = detect(detector,I,'Threshold',0.15);
id = find(scores<0.4);
bboxes(id,:)=[];
scores(id)=[];
if ~isempty(bboxes) % 如果检测到目标
[Vs,Is] = sort(scores);
if length(scores) < 2
[Vs_,Is_] = max(scores);
I = insertObjectAnnotation(I,'rectangle',bboxes(Is_,:),scores(Is_),LineWidth=2);% 在图像上绘制检测结果
else
I = insertObjectAnnotation(I,'rectangle',bboxes(Is(end-1:end),:),scores(Is(end-1:end)),LineWidth=2);% 在图像上绘制检测结果
end
end
imshow(I, []); % 显示带有检测结果的图像
pause(0.01);% 等待一小段时间,使图像显示更流畅
end
101
4.算法理论概述
基于YOLOv2深度学习网络的车辆检测是一种高效的目标检测算法,广泛应用于交通监控、自动驾驶等领域。YOLOv2是You Only Look Once(YOLO)系列算法的第二代,相较于第一代在速度和准确性上都有所提升。下面将详细介绍基于YOLOv2深度学习网络的车辆检测原理,包括白天场景和夜晚场景,并给出相关的数学公式。
4.1 YOLOv2算法原理
YOLOv2算法是一种单阶段目标检测算法,它将目标检测任务转换为回归问题,直接通过一次前向传播得到目标的位置和类别信息。相比于两阶段目标检测算法(如Faster R-CNN),YOLOv2在速度上更快,但准确性上也能达到相当的水平。
YOLOv2算法的核心思想是将图像划分为S×S的网格,每个网格负责预测B个边界框(Bounding Box)以及这些边界框的置信度。同时,每个网格还需要预测该网格内存在的目标属于C个类别中的哪一个。因此,YOLOv2的输出张量维度为S×S×(B×5+C),其中5表示边界框的四个坐标和一个置信度。
在YOLOv2中,采用了多种策略来提升算法的性能,包括引入批归一化(Batch Normalization)、使用高分辨率分类器(High Resolution Classifier)、采用先验框(Anchor Boxes)等。这些策略使得YOLOv2在保持实时性的同时,提高了目标检测的准确性。
4.2 车辆检测原理
基于YOLOv2深度学习网络的车辆检测主要包括以下几个步骤:
- 数据预处理:将输入的图像进行缩放和归一化,使其符合网络的输入要求。
- 特征提取:利用YOLOv2的网络结构,对输入图像进行卷积和非线性激活操作,提取出图像的特征。
- 目标预测:根据提取出的特征,预测每个网格内是否存在目标以及目标的位置和类别信息。
- 非极大值抑制:对预测出的目标进行非极大值抑制(NMS),去除重叠度较高的目标,得到最终的目标检测结果。
在车辆检测中,YOLOv2可以识别多种类型的车辆,如轿车、卡车、公交车等。通过训练大量的车辆样本,YOLOv2可以学习到车辆的特征表示,从而实现准确的车辆检测。
4.3 白天场景和夜晚场景的车辆检测
基于YOLOv2深度学习网络的车辆检测在白天场景和夜晚场景中都能取得较好的效果。这主要得益于YOLOv2算法的强大特征提取能力和鲁棒性。
在白天场景中,由于光照充足、颜色鲜明,车辆的特征较为明显,YOLOv2可以较容易地识别出各种类型的车辆。而在夜晚场景中,由于光照不足、颜色暗淡,车辆的特征变得模糊,给车辆检测带来了一定的挑战。然而,通过增加夜间场景的训练样本和使用适当的图像增强技术(如亮度增强、对比度增强等),YOLOv2仍然可以实现较为准确的车辆检测。
此外,针对夜间场景的车辆检测,还可以考虑引入其他辅助信息(如红外图像、雷达数据等),以进一步提高检测的准确性。
5.算法完整程序工程
OOOOO
OOO
O
































![RabbitMQ 部署与配置[CentOS7]](https://img-blog.csdnimg.cn/direct/aae23989ad82489da1072f861fbc701e.png#pic_center)