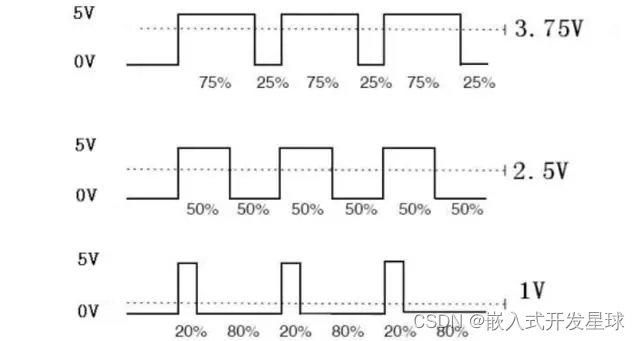
大家好,今天给大家分享一下,如何利用PWM外设来实现LCD背光调节,本次实验使用Linux系统中PWM控制器以及PWM子系统来控制对应的功能。
第一:设备树下PWM控制节点
PWM对应的节点信息如下:
pwm3: pwm@02088000 {
compatible = "fsl,imx6ul-pwm", "fsl,imx27-pwm";
reg = <0x02088000 0x4000>;
interrupts = <GIC_SPI 85 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&clks IMX6UL_CLK_PWM3>,
<&clks IMX6UL_CLK_PWM3>;
clock-names = "ipg", "per";
#pwm-cells = <2>;
};第二:PWM子系统
Linux内核提供了PWM子系统框架,编写PWM驱动的时候一定要符合这个框架。PWM子系统核心是pwm_chip结构体。
struct pwm_chip {
struct device *dev;
struct list_head list;
const struct pwm_ops *ops;
int base;
unsigned int npwm;
struct pwm_device *pwms;
struct pwm_device * (*of_x