I.MX6U-ALPHA 开发板上的 LED 连接到 I.MX6ULL 的 GPIO1_IO03 这个引脚上,进行这个驱动开发实验之前,需要了解下地址映射。
地址映射
MMU 全称叫做 MemoryManage Unit,也就是内存管理单元。在老版本的 Linux 中要求处理器必须有 MMU,但是现在
Linux 内核已经支持无 MMU 的处理器了。 MMU 主要完成的功能如下:
①、完成虚拟空间到物理空间的映射。
②、内存保护,设置存储器的访问权限,设置虚拟存储空间的缓冲特性。
虚拟空间到物理空间的映射,也叫做地址映射。首先了解两个地址概念:虚拟地址(VA,Virtual Address)、物理地址(PA, Physcical Address)。对于 32 位的处理器来说,虚拟地址范围是 2^32=4GB,我们的开发板上有 512MB 的 DDR3,这 512MB 的内存就是物理内存,经过 MMU 可以将其映射到整个 4GB 的虚拟空间。
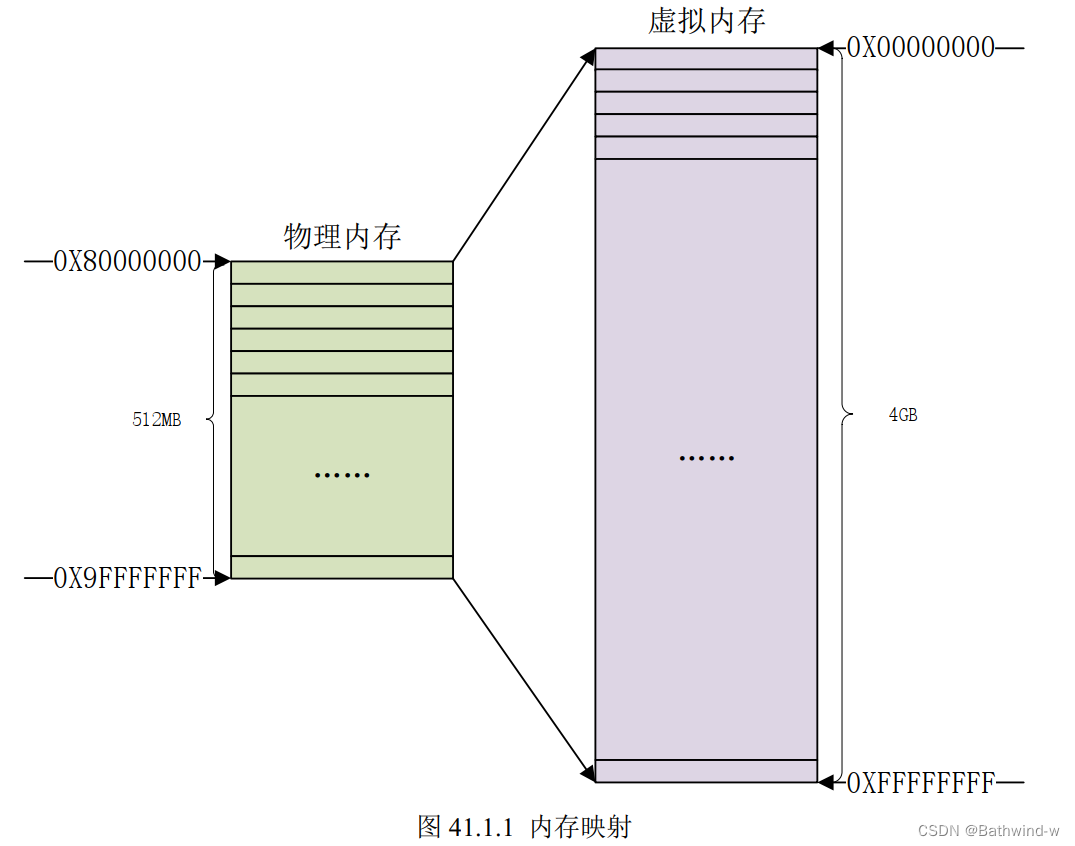
由于512MB是比4GB空间是要小的,所以会有那么肯定存在多个虚拟地址映射到同一个物理地址上去,linux 内核启动的时候会初始化 MMU,设置好内存映射,设置好以后 CPU 访问的都是虚拟 地 址 。 比 如 I.MX6ULL 的 GPIO1_IO03 引 脚 的 复 用 寄 存 器IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 的地址为 0X020E0068。如果没有开启 MMU 的话直接向 0X020E0068 这个寄存器地址写入数据就可以配置 GPIO1_IO03 的复用功能。现在开启了 MMU,并且设置了内存映射,因此就不能直接向 0X020E0068 这个地址写入数据了。要得到 0X020E0068 这个物理地址在 Linux 系统里面对应的虚拟地址,这里就涉及到了物理内存和虚拟内存之间的转换。下面介绍下使用的函数:
1、 ioremap 函数
ioremap 函 数 用 于 获 取 指 定 物 理 地 址 空 间 对 应 的 虚 拟 地 址 空 间 , 定 义 在arch/arm/include/asm/io.h 文件中,定义如下:
示例代码 41.1.1.1 ioremap 函数
1 #define ioremap(cookie,size) __arm_ioremap((cookie), (size),MT_DEVICE)
2 3
void __iomem * __arm_ioremap(phys_addr_t phys_addr, size_t size,unsigned int mtype)
4 {
5 return arch_ioremap_caller(phys_addr, size, mtype,__builtin_return_address(0));
6 }
ioremap 是个宏,有两个参数: cookie 和 size,真正起作用的是函数__arm_ioremap,此函数有三个参数和一个返回值,这些参数和返回值的含义如下:
phys_addr:要映射的物理起始地址。
size:要映射的内存空间大小。
mtype: ioremap 的类型,可以选择 MT_DEVICE、 MT_DEVICE_NONSHARED、
MT_DEVICE_CACHED 和 MT_DEVICE_WC, ioremap 函数选择 MT_DEVICE。
返回值: __iomem 类型的指针,指向映射后的虚拟空间首地址。
假如我们要获取 I.MX6ULL 的 IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 寄存器对应的虚拟地址,使用如下代码即可:
#define SW_MUX_GPIO1_IO03_BASE (0X020E0068)
static void __iomem* SW_MUX_GPIO1_IO03;
SW_MUX_GPIO1_IO03 = ioremap(SW_MUX_GPIO1_IO03_BASE, 4);
宏 SW_MUX_GPIO1_IO03_BASE 是寄存器物理地址, SW_MUX_GPIO1_IO03 是映射后的虚拟地址。对于 I.MX6ULL 来说一个寄存器是 4 字节(32 位)的,因此映射的内存长度为 4。映射完成以后直接对 SW_MUX_GPIO1_IO03 进行读写操作即可。
2、 iounmap 函数
卸载驱动的时候需要使用 iounmap 函数释放掉 ioremap 函数所做的映射, iounmap 函数原型如下:
示例代码 41.1.1.2 iounmap 函数原型
void iounmap (volatile void __iomem *addr)
iounmap 只有一个参数 addr,此参数就是要取消映射的虚拟地址空间首地址。假如我们现在要取消掉IOMUXC_SW_MUX_CTL_PAD
_GPIO1_IO03 寄存器的地址映射,使用如下代码即可:
iounmap(SW_MUX_GPIO1_IO03);
3:I/O 内存访问函数
I/O 端口和 I/O 内存。当外部寄存器或内存映射到 IO 空间时,称为 I/O 端口。当外部寄存器或内存映射到内存空间时,称为 I/O 内存。但是对于 ARM 来说没有 I/O 空间这个概念,因此 ARM 体系下只有 I/O 内存(可以直接理解为内存)。使用 ioremap 函数将寄存器的物理地址映射到虚拟地址以后,我们就可以直接通过指针访问这些地址。具体函数如下面所示:
1、读操作函数
示例代码 41.1.2.1 读操作函数
1 u8 readb(const volatile void __iomem *addr)
2 u16 readw(const volatile void __iomem *addr)
3 u32 readl(const volatile void __iomem *addr)
readb、 readw 和 readl 这三个函数分别对应 8bit、 16bit 和 32bit 读操作,参数 addr 就是要读取写内存地址,返回值就是读取到的数据。由于IMX6ULL是32位,所以采用readl
2、写操作函数
示例代码 41.1.2.2 写操作函数
1 void writeb(u8 value, volatile void __iomem *addr)
2 void writew(u16 value, volatile void __iomem *addr)
3 void writel(u32 value, volatile void __iomem *addr)
writeb、 writew 和 writel 这三个函数分别对应 8bit、 16bit 和 32bit 写操作,参数 value 是要写入的数值, addr 是要写入的地址。
LED 灯驱动程序编写
这里GPIO对应的寄存器物理地址以及映射后的寄存器虚拟地址指针要先写好,具体如下:
/* 寄存器物理地址 */
#define CCM_CCGR1_BASE (0X020C406C)
#define SW_MUX_GPIO1_IO03_BASE (0X020E0068)
#define SW_PAD_GPIO1_IO03_BASE (0X020E02F4)
#define GPIO1_DR_BASE (0X0209C000)
#define GPIO1_GDIR_BASE (0X0209C004)
/* 映射后的寄存器虚拟地址指针 */
static void __iomem *IMX6U_CCM_CCGR1;
static void __iomem *SW_MUX_GPIO1_IO03;
static void __iomem *SW_PAD_GPIO1_IO03;
static void __iomem *GPIO1_DR;
static void __iomem *GPIO1_GDIR;
首先思考一下要驱动LED灯,其实就是相当于往这个设备去写数据,然后根据数据中的值去控制寄存器输出高低电平,所以先编写一个根据不同数值去改变LED亮灭,具体函数为:
void LED_Switches(u8 state)
{
u32 retval = 0;
if (state == LEDON)
{
retval = readl(GPIO1_DR);
retval &= ~(1 << 3);
writel(retval, GPIO1_DR);
}
else if (state == LEDOFF)
{
retval = readl(GPIO1_DR);
retval |= (1 << 3);
writel(retval, GPIO1_DR);
}
}
上面的逻辑很简单,就是判断亮灯,就读取GPIO1_DR的值,并且赋值之后重新写入寄存器,这样就完成对这个IO口高低电平的控制。
接下来就定义所需要的open、read、write、release函数。其中write函数是重点。
/*
* @description : 打开设备
* @param – inode : 传递给驱动的 inode
* @param - filp : 设备文件, file 结构体有个叫做 private_data 的成员变量
* 一般在 open 的时候将 private_data 指向设备结构体。
* @return : 0 成功;其他 失败
*/
static int ledopen(struct inode *inode, struct file *filp)
{
return 0;
}
/*
* @description : 从设备读取数据
* @param - filp : 要打开的设备文件(文件描述符)
* @param - buf : 返回给用户空间的数据缓冲区
* @param - cnt : 要读取的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 读取的字节数,如果为负值,表示读取失败
*/
static int ledread(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
return 0;
}
/*
* @description : 向设备写数据
* @param - filp : 设备文件,表示打开的文件描述符
* @param - buf : 要写给设备写入的数据
* @param - cnt : 要写入的数据长度
* @param - offt : 相对于文件首地址的偏移
* @return : 写入的字节数,如果为负值,表示写入失败
*/
static ssize_t ledwrite(struct file *filp, char __user *buf, size_t cnt, loff_t off_t)
{
int retvalue = 0;
unsigned char databuf[1];
u8 ledstat;
retvalue = copy_from_user(databuf, buf, cnt);
if (retvalue < 0)
{
printk("kernel write failed!\r\n");
return -EFAULT;
}
ledstat = databuf[0];
if (ledstat == LEDON)
{
LED_Switches(LEDON);
}
else if (ledstat == LEDOFF)
{
LED_Switches(LEDOFF);
}
return 0;
}
/*
* @description : 关闭/释放设备
* @param – filp : 要关闭的设备文件(文件描述符)
* @return : 0 成功;其他 失败
*/
static int led_release(struct inode *inode, struct file *filp)
{
return 0;
}
wirte函数也就是对设备写入数据。定义一个databuf的数组接收用户组来的数据。因为是从用户区到系统内核,所以调用copy_from_user函数。得到写入的数据后根据这个数据匹配是开灯还是关灯指令。进一步调用上面定义的函数。
接下来就是设备初始化以及设备退出函数的编写。如下所示:
static int __init led_init(void)
{
int retvalue = 0;
u32 val = 0;
/* 初始化 LED */
/* 1、寄存器地址映射 */
IMX6U_CCM_CCGR1 = ioremap(CCM_CCGR1_BASE, 4);
SW_MUX_GPIO1_IO03 = ioremap(SW_MUX_GPIO1_IO03_BASE, 4);
SW_PAD_GPIO1_IO03 = ioremap(SW_PAD_GPIO1_IO03_BASE, 4);
GPIO1_DR = ioremap(GPIO1_DR_BASE, 4);
GPIO1_GDIR = ioremap(GPIO1_GDIR_BASE, 4);
/* 2、使能 GPIO1 时钟 */
val = readl(IMX6U_CCM_CCGR1);
val &= ~(3 << 26); /* 清除以前的设置 */
val |= (3 << 26); /* 设置新值 */
writel(val, IMX6U_CCM_CCGR1);
/* 3、设置 GPIO1_IO03 的复用功能,将其复用为
* GPIO1_IO03,最后设置 IO 属性。
*/
writel(5, SW_MUX_GPIO1_IO03);
/* 寄存器 SW_PAD_GPIO1_IO03 设置 IO 属性 */
writel(0x10B0, SW_PAD_GPIO1_IO03);
/* 4、设置 GPIO1_IO03 为输出功能 */
val = readl(GPIO1_GDIR);
val &= ~(1 << 3); /* 清除以前的设置 */
val |= (1 << 3); /* 设置为输出 */
writel(val, GPIO1_GDIR);
/* 5、默认关闭 LED */
val = readl(GPIO1_DR);
val |= (1 << 3);
writel(val, GPIO1_DR);
/* 6、注册字符设备驱动 */
retvalue = register_chrdev(LED_MAJOR, LED_NAME, &led_fops);
if (retvalue < 0)
{
printk("register chrdev failed!\r\n");
return -EIO;
}
return 0;
}
static void __exit led_exit(void)
{
/* 取消映射 */
iounmap(IMX6U_CCM_CCGR1);
iounmap(SW_MUX_GPIO1_IO03);
iounmap(SW_PAD_GPIO1_IO03);
iounmap(GPIO1_DR);
iounmap(GPIO1_GDIR);
/* 注销字符设备驱动 */
unregister_chrdev(LED_MAJOR, LED_NAME);
}
module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("wyw");
编写测试 APP
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
#define LEDON 1
#define LEDOFF 0
/*
24 * @description : main 主程序
25 * @param - argc : argv 数组元素个数
26 * @param - argv : 具体参数
27 * @return : 0 成功;其他 失败
28 */
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned databuf[1];
if (argc != 3)
{
printf("Error:Usage!\r\n");
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if (fd < 0)
{
printf("Can't open file %s\r\n", filename);
return -1;
}
databuf[0] = atoi(argv[2]);
retvalue = write(fd, databuf,sizeof(databuf));
if (retvalue < 0)
{
printf("LED Control Failed!\r\n");
close(fd);
return -1;
}
/* 关闭设备 */
retvalue = close(fd);
if (retvalue < 0)
{
printf("Can't close file %s\r\n", filename);
return -1;
}
return 0;
}
上面这部分程序对于上一节的内容来说,稍微改一下就可以。由于我们输入的测试命令为:
./ledApp /dev/led 1 %测试app/申请的设别节点/数值
所以定义一个数组来存放命令中第三个参数也就是开关灯对应的数值,然后调用write函数写入设备。即可完成点灯。编译以及测试步骤参考上一节内容





























![[自学记录09*]Unity Shader:在Unity里渲染一个黑洞](https://img-blog.csdnimg.cn/direct/506aab167d8a40b995a0392ea744c705.png)