STM32单片机陀螺仪MPU6050角度报警器加速度024X
功能描述:
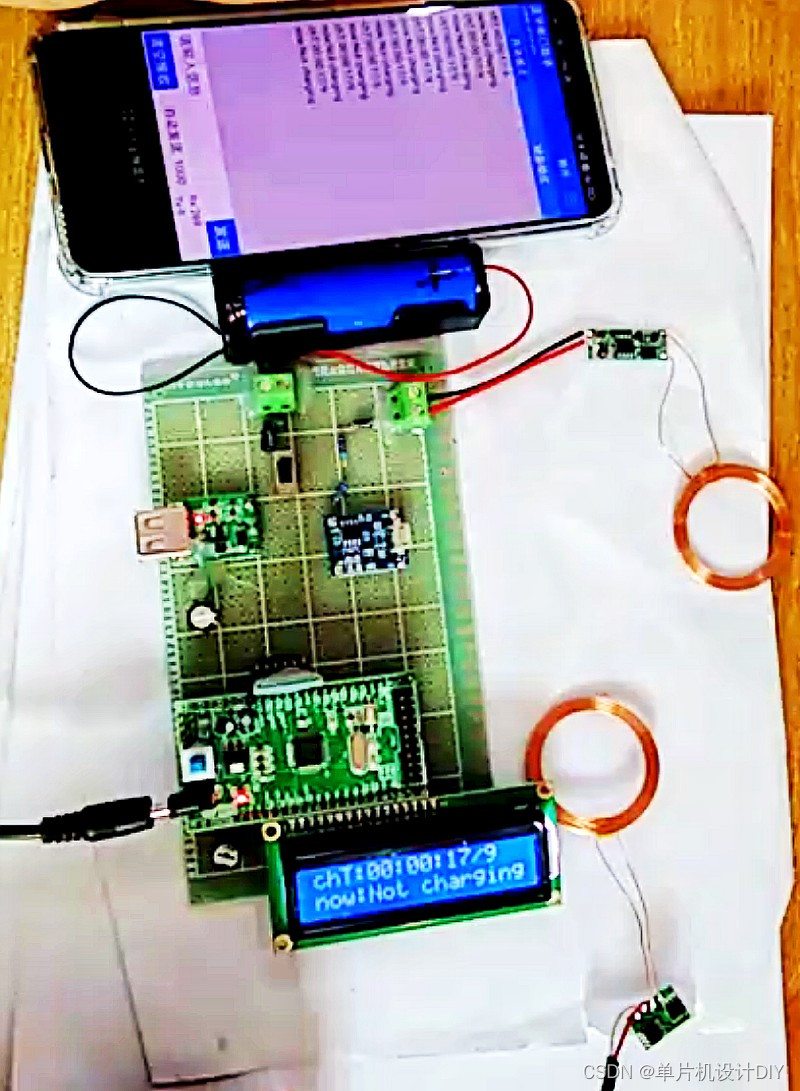
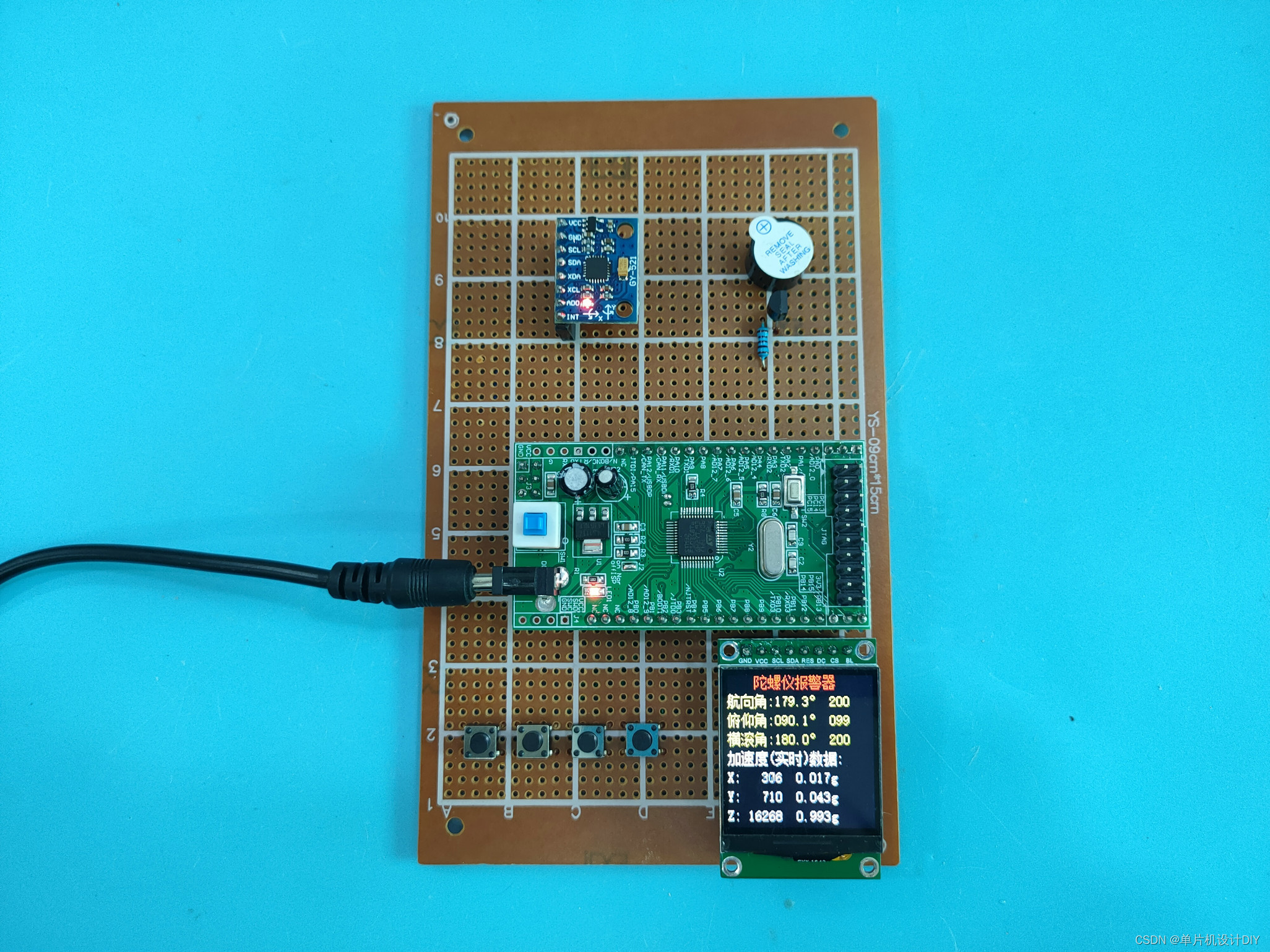
本系统由STM32F103C8T6单片机核心板、TFT1.44寸彩屏液晶显示电路、MPU6050数据采集电路、(无线蓝牙/WIFI模块-可选)、蜂鸣器报警电路、按键电路及电源组成。
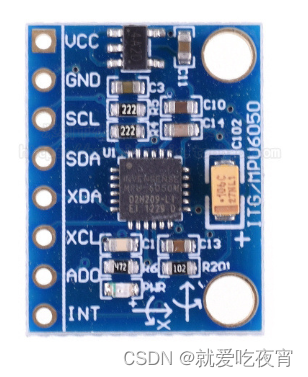
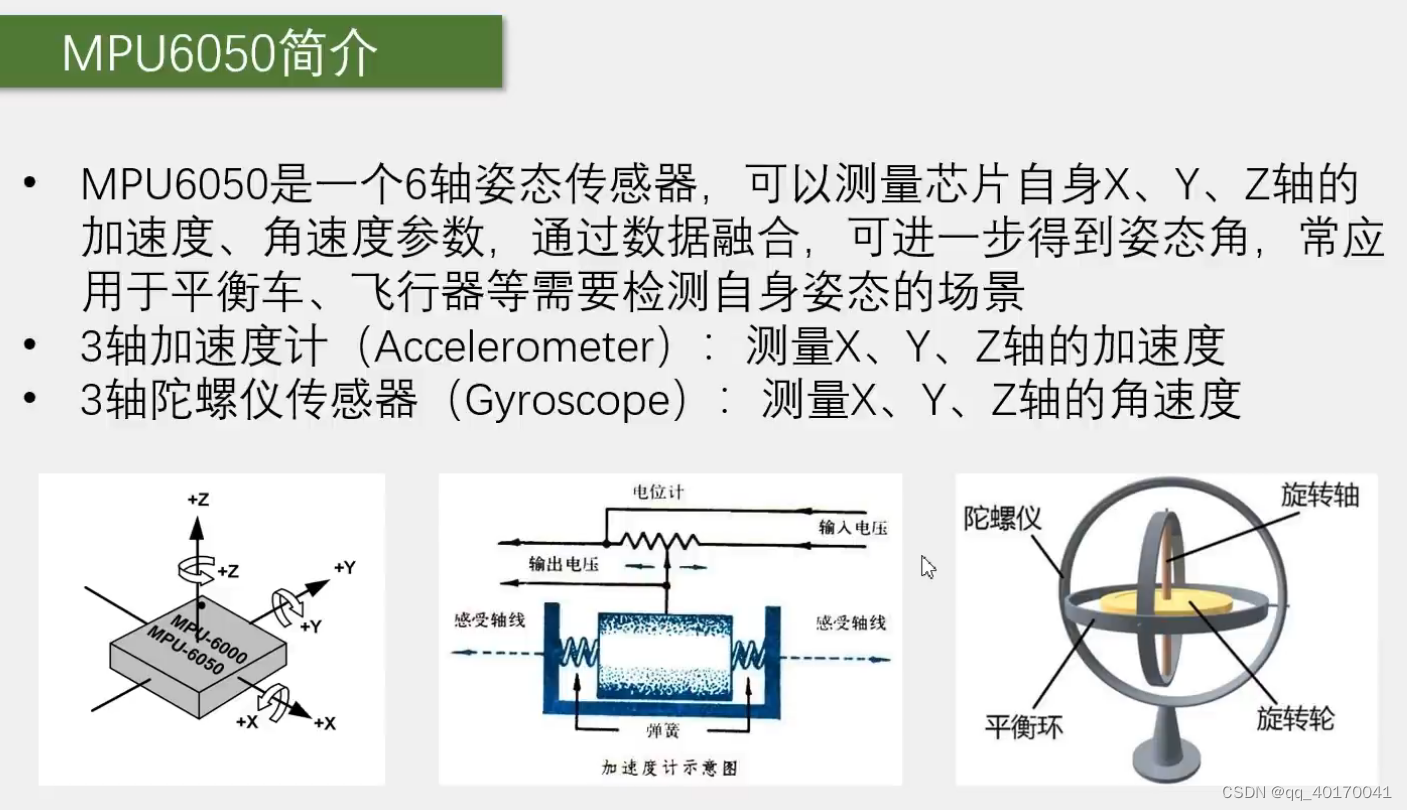
【1】单片机实时采集陀螺仪模块MPU6050数据,然后最终获取到航向角、俯仰角、横滚角,以及直接采取到的X轴、Y轴、Z轴的初始数据,为了方便直观,讲采集到的原始数据显示在TFT液晶上,同时转化为单位g(加速度单位)。按键能够设置每个方向角的阈值,如果当前角度超过设置阈值,蜂鸣器报警。
【2】上电初始化,液晶显示相应标题。液晶显示相应数据。其中包括航向角、俯仰角、横滚角,以及直接采取到的X轴、Y轴、Z轴的初始数据,同时转化为单位g。显示在液晶上面。其中按键K1进入设置状态,对应设置参数有“<<”指示,K2、K3对数据进行加减处理。由于数据是实时的,如果想暂停数据查看当前某一状态数据,可以通过按键K4按下,数据进行暂停显示,液晶有相应提醒,此时数据固定显示不变,再次按下恢复。
【3】X轴、Y轴、Z轴的原始数据,是没有经过分析的,也就是根据实际读取到的原始数据。不是很直观,仅供才考。
【4】设计中设置的阈值参数保存到单片机Flash中,具有掉电不丢失功能。
MPU6050模块上电需要初始化,以初始化完成的姿态为初始状态,上电时尽量保证平放。
【5】无线APP功能:
APP能够连接板载无线模块,查看相应数据;
APP能够操作上述存在的功能操作。
APP能够发送指令/或者接收指令。


![[AG<span style='color:red;'>32</span>VF407]国产<span style='color:red;'>MCU</span>+FPGA 使用I2C测试<span style='color:red;'>陀螺</span><span style='color:red;'>仪</span><span style='color:red;'>MPU</span><span style='color:red;'>6050</span>](https://img-blog.csdnimg.cn/direct/b8a67386aed24c5b9ddac5ac8513d5ef.png)