21-288、STM32陀螺仪MPU6050实物产品设计-MPU6050
产品功能描述:
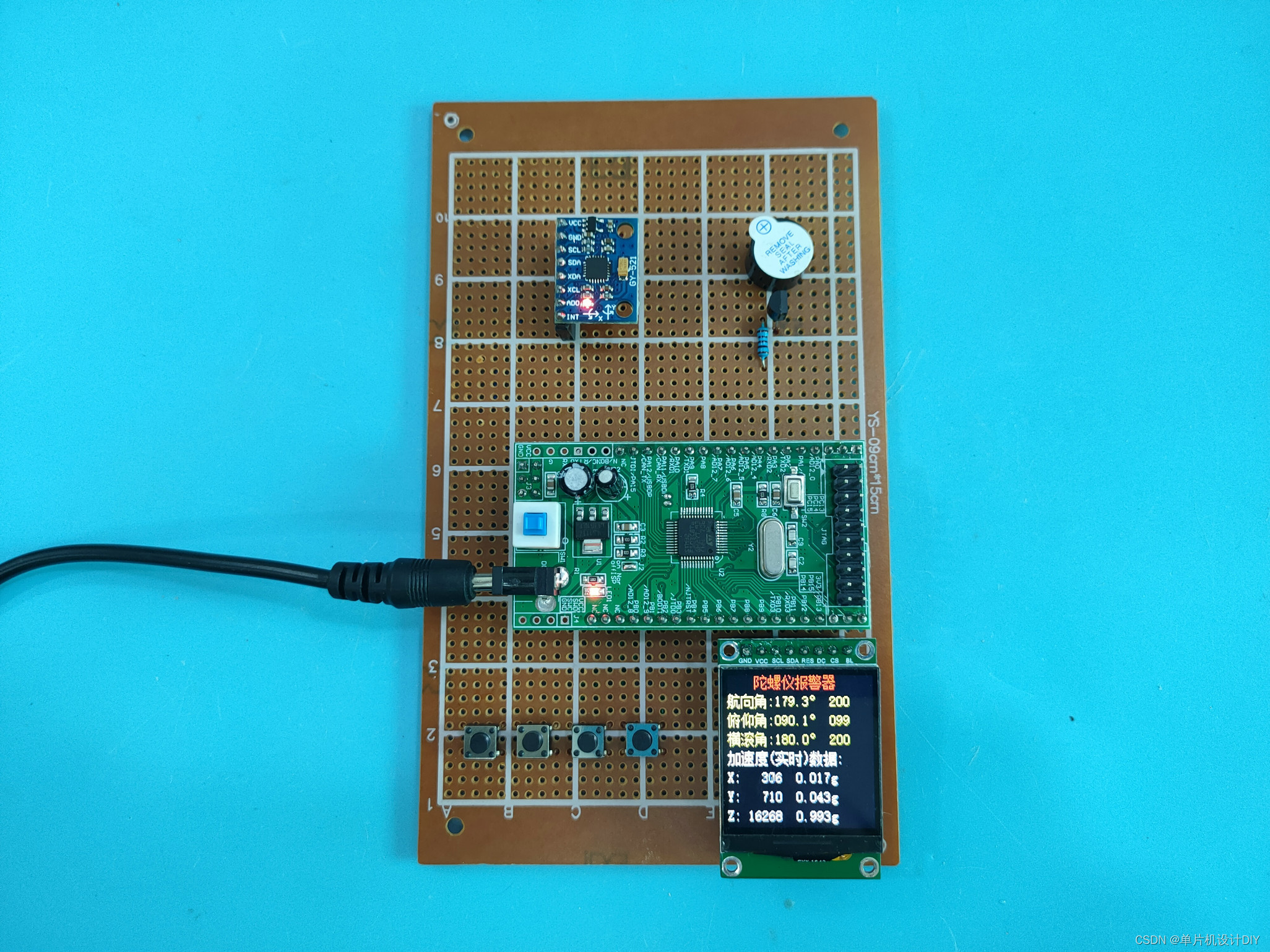
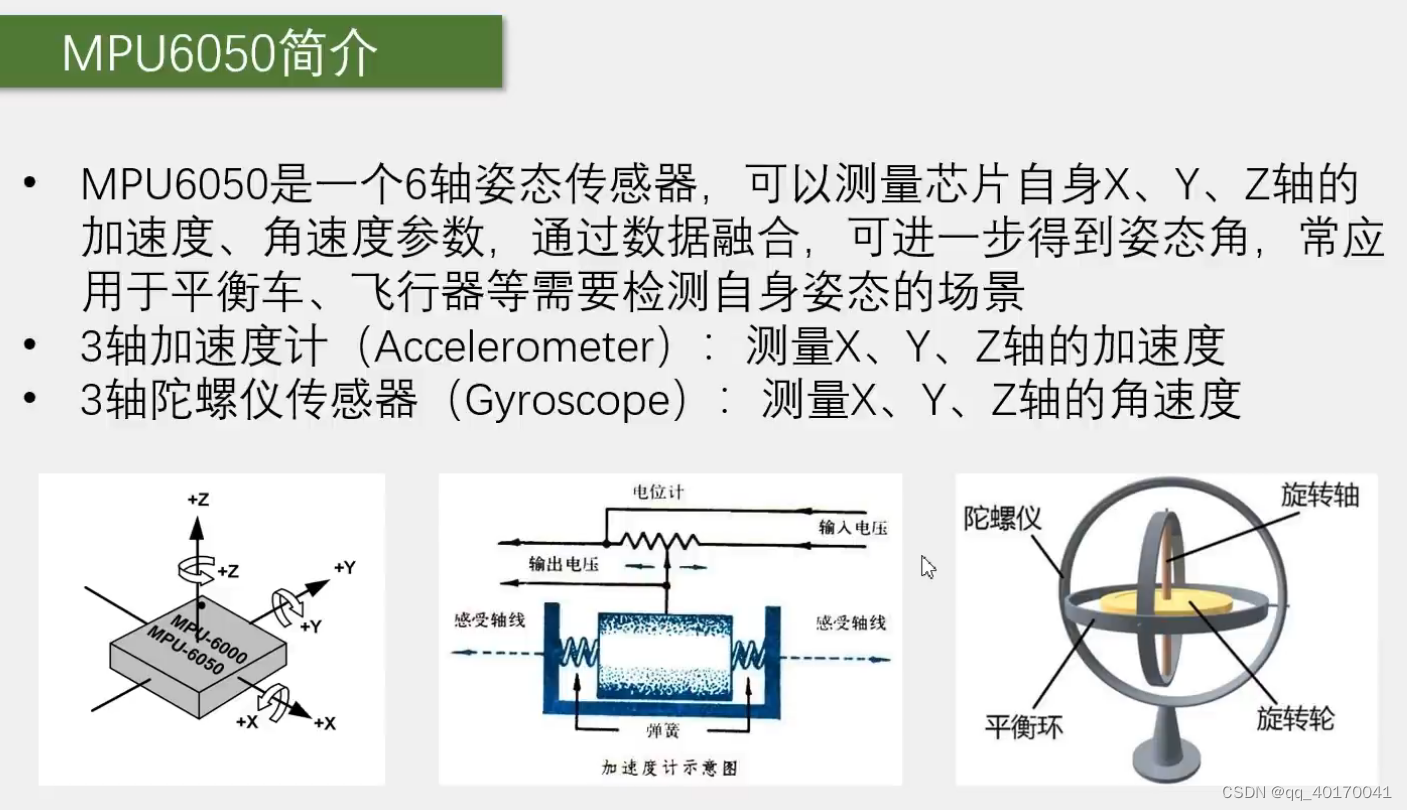
本设计由STM32F103C8T6单片机+MPU6050芯片电路组成。
1、系统采集MPU6050芯片采集的航向角、横滚角、俯仰角直接通过串口通讯输出。


![[AG<span style='color:red;'>32</span>VF407]国产<span style='color:red;'>MCU</span>+FPGA 使用I2C测试<span style='color:red;'>陀螺</span><span style='color:red;'>仪</span><span style='color:red;'>MPU</span><span style='color:red;'>6050</span>](https://img-blog.csdnimg.cn/direct/b8a67386aed24c5b9ddac5ac8513d5ef.png)























![[Vue3] 配置 Pinia 并存储、读取、修改数据 | 集中式状态(数据)管理](https://img-blog.csdnimg.cn/direct/b9bac6f1203d40d5b284ccff96888158.png)