前面讲了正交,接下来就是一般化的形式,就是对辛空间所在的空间进行限制或者叫构造,
先给一个定义纯量乘积(x|e)是向量在e上的投影其中e的长度为1,
先上空间解释了,e的长度规定了个数,那么辛空间x的个数就是长度1含有的个数,这里将x和e写在一起,那么就代表着有着同样的参照点,这种有同样的参照点0,这里才是x0y坐标的精髓,
这样有共同点0的形式就是自伴的,
这里需要重新说明之前的自伴,因为自伴这个词还是不太严谨的说法,
先说一点仿射空间,在任意一个向量空间中与0向量结合在一起的坐标原点都是特殊的,所以0作为x,y的仿射的集合,集合0处的值通过向量方向平移到x处,x就是一个仿射空间,y处也是一个仿射空间,因为都是同一个空间平移过来,所以这个形式叫做同构,都是以点0处的集合作为平移的出发点。
在坐标系中用的是0点,但实际上不止可以使用0点,只是因为0点和向量更容易构成相伴的特性,更为普遍。
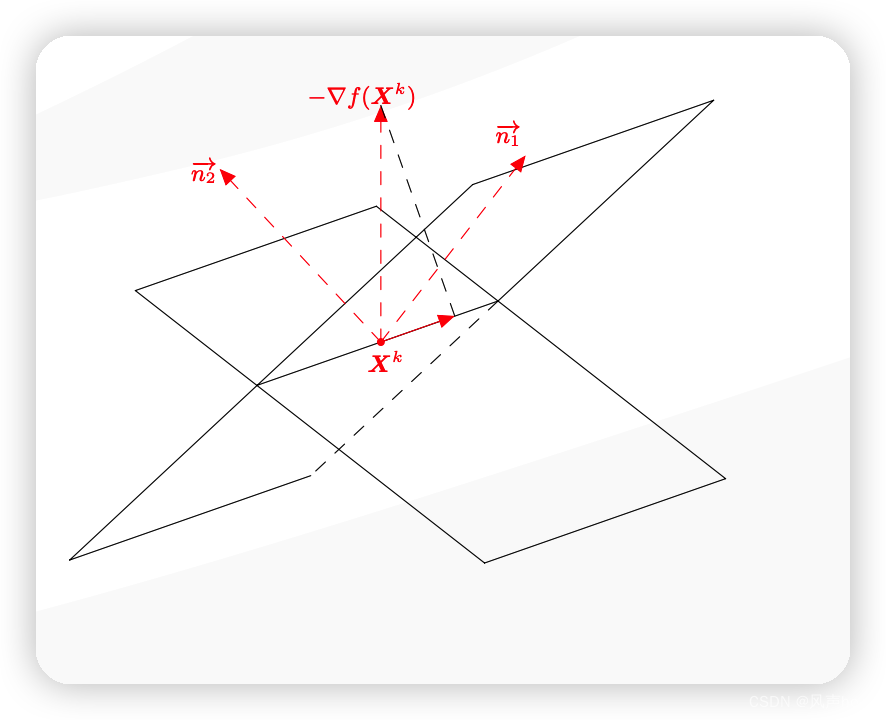
接下来就是纯量乘积(x|e),借用仿射来解释投影矩阵,辛空间x沿着e的方向平移,移动的长度的数目是长度1含有的个数,移动的方向是e坐标的特征值,也就是e的向量方向,又因为这个过程中的每一个辛空间x的特征值,都是x的向量,它所走的途径就是就是e构成的连带的(相伴的)空间,那么x就被构造成了e方向上的投影了,之后讲总的个数乘辛空间x,将这个新的个数用辛空间表示出来,得到的就是纯量乘积(x|e)的坐标。