4.5.2.5. GPS记忆位置开启(预留,待长城确认). 68
4.5.19.4. 远程全景查看/HAVP远程实时视频查看功能. 99
4.9.1.1. DVR前视激活硬件连接关系和供电方式. 137
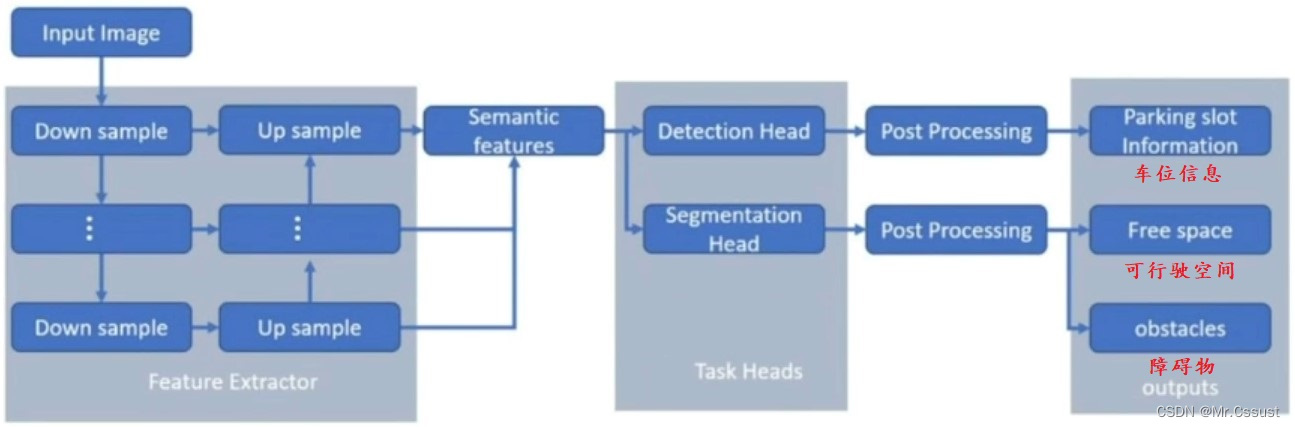
本文档描述了代客泊车开发项目中的基础功能-360环式系统及倒车雷达功能规范。
AVM(Around View Monitor): 全景环式系统,是在行驶过程和泊车过程中,辅助驾驶员了解车辆周边视线盲区,并支持人工驾驶。
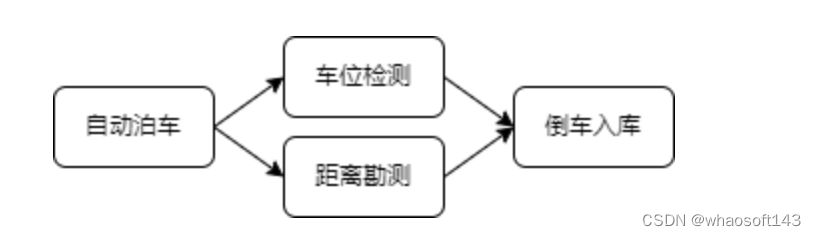
PAS(Parking Asistent System): 倒车系统可在泊车(倒车)过程辅助驾驶员,该功能可支持人工倒车。主要系统包含:倒车雷达预警部分。
倒车雷达预警:倒车雷达是汽车驻车或者倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员驻车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷。倒车雷达包含:倒车雷达预警图及倒车雷达声音报警。
辅助轨迹线:辅助轨迹线是汽车驻车或者倒车时的安全辅助装置,通过在HU界面的轨迹线及红、黄、绿三条距离警示线组成的区域来显示障碍物与车辆距离,来帮助驾驶员直观的了解障碍物与车辆距离,辅助保障驾驶安全。
当本文档描述与本文档引用文档发生冲突时,以本文档为准。但是,本文档任何描述不应违背相关法律法规,除非得到特殊豁免。
本文档相关的政府法规如下列举。
标号 |
标题 |
版本/修改日期 |
(如:SAE,ISO等)
标号 |
标题 |
版本/修改日期 |
需完整功能规范私信或+q1356535550