介绍
信号量是进程间通信的一种同步机制,用于管理多个进程对共享资源的访问。以下是一些关于信号量的关键要点:
信号量概念:
- 信号量是一个特殊的变量或计数器,其值表示可供并发进程使用的资源数量。
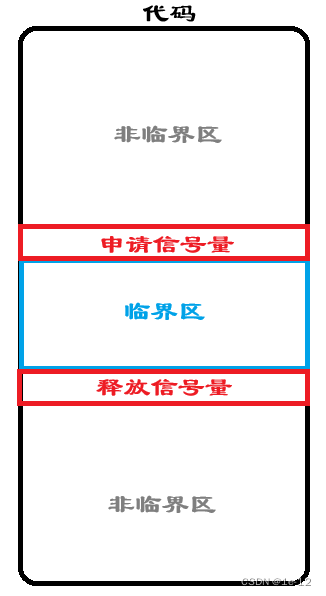
- 信号量可以用来控制对临界区(critical section)的访问,确保在任何给定时刻只有一个进程在使用该资源。
P/V操作:
- 信号量主要进行两种操作:等待§和发送(V)。
- P操作会检查信号量的值:
- 如果信号量的值大于0,将其减1,进程可以继续执行。
- 如果信号量的值为0,进程会被阻塞(挂起),并放入一个等待队列中,直到其他进程执行V操作释放信号量。
- V操作会将信号量的值增加1:
- 如果信号量的值小于或等于0,唤醒等待队列中的一个进程。
- 如果信号量的值已经大于0,只需简单地增加其值。
类型:
- 二进制信号量:只能取0或1的信号量,常用于实现互斥锁(mutex)。
- 计数信号量:可以取大于1的值,用于控制可重入资源的数量。
系统调用:
- 在Unix/Linux系统中,常用的信号量系统调用包括:
semget():创建或获取一个信号量集。semop():执行P/V操作。semctl():控制信号量的各种属性。
- 在Unix/Linux系统中,常用的信号量系统调用包括:
参数:
semget()函数的参数包括:key:一个键值,用于标识全局唯一的信号量集。nsems:要创建或获取的信号量数量。flags:标志位,可以指定权限和其他选项。
工作原理:
- 当一个进程需要访问共享资源时,它首先执行P操作,减少信号量的值。
- 如果信号量的值变为非正数,该进程被阻塞,直到其他进程执行V操作增加信号量的值并唤醒它。
- 当进程完成对资源的访问后,它执行V操作,释放信号量,允许其他等待的进程继续执行。
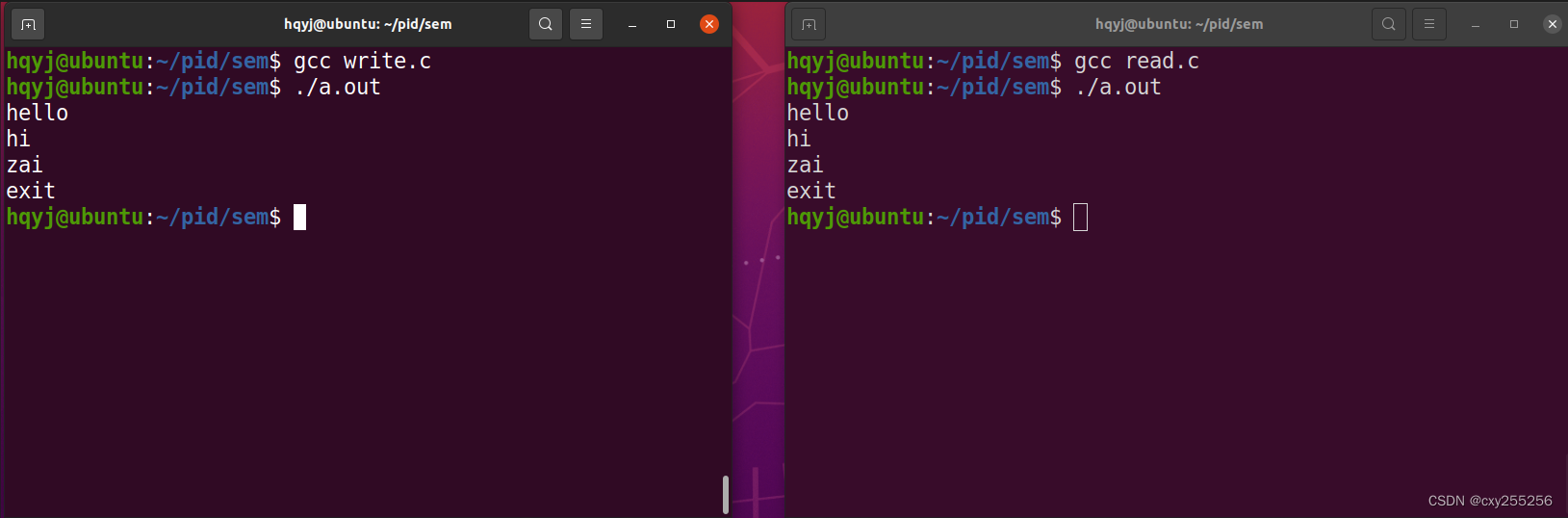
实现举例
使用POSIX semaphore API实现两个进程之间的同步。创建一个信号量,并让两个进程交替打印数字。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
#define SEM_KEY 1234
int main() {
int semid;
struct sembuf P = {
0, -1, SEM_UNDO}, V = {
0, 1, SEM_UNDO};
// 创建信号量
if ((semid = semget(SEM_KEY, 1, IPC_CREAT | 0600)) == -1) {
perror("semget");
exit(EXIT_FAILURE);
}
pid_t pid;
if ((pid = fork()) == -1) {
perror("fork");
exit(EXIT_FAILURE);
} else if (pid == 0) {
// 子进程
for (int i = 1; i <= 5; ++i) {
// 执行P操作,获取信号量
if (semop(semid, &P, 1) == -1) {
perror("semop (P)");
exit(EXIT_FAILURE);
}
printf("Child: %d\n", i);
// 执行V操作,释放信号量
if (semop(semid, &V, 1) == -1) {
perror("semop (V)");
exit(EXIT_FAILURE);
}
}
exit(EXIT_SUCCESS);
} else {
// 父进程
for (int i = 6; i <= 10; ++i) {
// 执行P操作,获取信号量
if (semop(semid, &P, 1) == -1) {
perror("semop (P)");
exit(EXIT_FAILURE);
}
printf("Parent: %d\n", i);
// 执行V操作,释放信号量
if (semop(semid, &V, 1) == -1) {
perror("semop (V)");
exit(EXIT_FAILURE);
}
}
wait(NULL);
exit(EXIT_SUCCESS);
}
}
实例说明
在这个例子中,首先创建一个信号量集,然后通过fork()函数创建一个子进程。父进程和子进程都执行类似的循环,但在循环内部,它们首先执行P操作来获取信号量,然后打印数字,最后执行V操作来释放信号量。由于信号量的值初始为1,因此每次只有一个进程能够获取到信号量并打印数字。当一个进程完成打印后,它会释放信号量,允许另一个进程继续执行。这样,两个进程就能交替打印数字了。
总结
进程间通讯的信号量是一种有效的机制,用于协调多个进程对共享资源的访问,确保系统的正确性和稳定性,防止竞态条件和死锁等问题的发生。