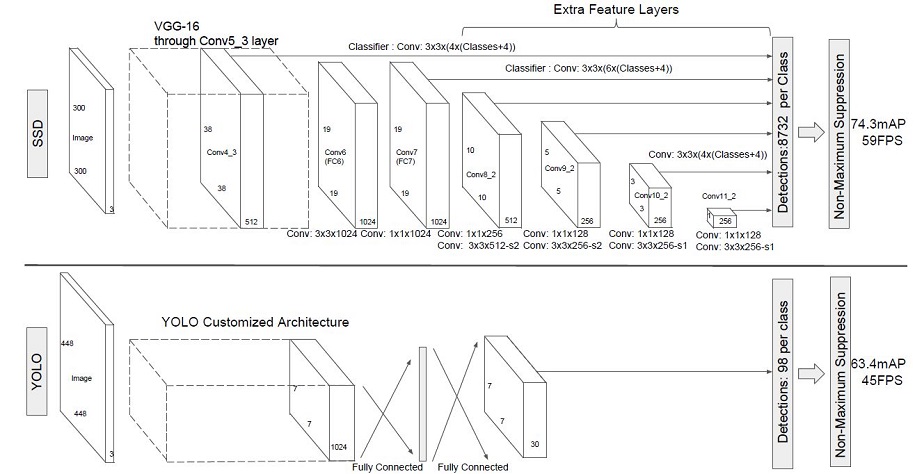
SSD,全称Single Shot MultiBox Detector,是Wei Liu在ECCV 2016上提出的一种目标检测算法。使用Nvidia Titan X在VOC 2007测试集上,SSD对于输入尺寸300x300的网络,达到74.3%mAP(mean Average Precision)以及59FPS;对于512x512的网络,达到了76.9%mAP ,超越当时最强的Faster RCNN(73.2%mAP)。具体可参考论文[1]。
SSD在输入基础上做了多次的卷积和池化。通过多次池化提取高层次语义。
mindrecord_file = "./datasets/MindRecord_COCO/ssd_eval.mindrecord0"
def ssd_eval(dataset_path, ckpt_path, anno_json):
"""SSD evaluation."""
batch_size = 1
ds = create_ssd_dataset(dataset_path, batch_size=batch_size,
is_training=False, use_multiprocessing=False)
network = SSD300Vgg16()
print("Load Checkpoint!")
net = SsdInferWithDecoder(network, Tensor(default_boxes), ckpt_path)
net.set_train(False)
total = ds.get_dataset_size() * batch_size
print("\n========================================\n")
print("total images num: ", total)
eval_param_dict = {"net": net, "dataset": ds, "anno_json": anno_json}
mAP = apply_eval(eval_param_dict)
print("\n========================================\n")
print(f"mAP: {mAP}")
def eval_net():
print("Start Eval!")
ssd_eval(mindrecord_file, "./ssd-60_9.ckpt", anno_json)
eval_net()
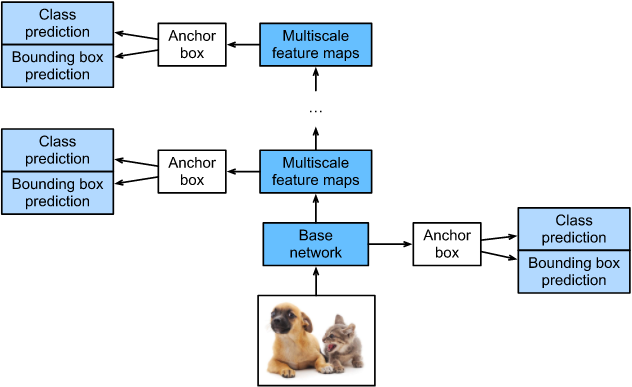
在SSD中,浅层的特征图具有较高的空间分辨率,适合检测小物体;而深层的特征图则具有更强的语义信息,适合检测大物体。这种多尺度特征图的融合利用,使得SSD在处理复杂场景中的多尺度目标时表现出色。我通过实践发现,调整不同层级特征图的权重和默认框的设置,可以进一步优化检测效果。

































![[Tensor学习]你不得不知道的知识点-切点-反转](https://i-blog.csdnimg.cn/direct/ae04c7994dc54b18b1f93050b8f81193.png)







