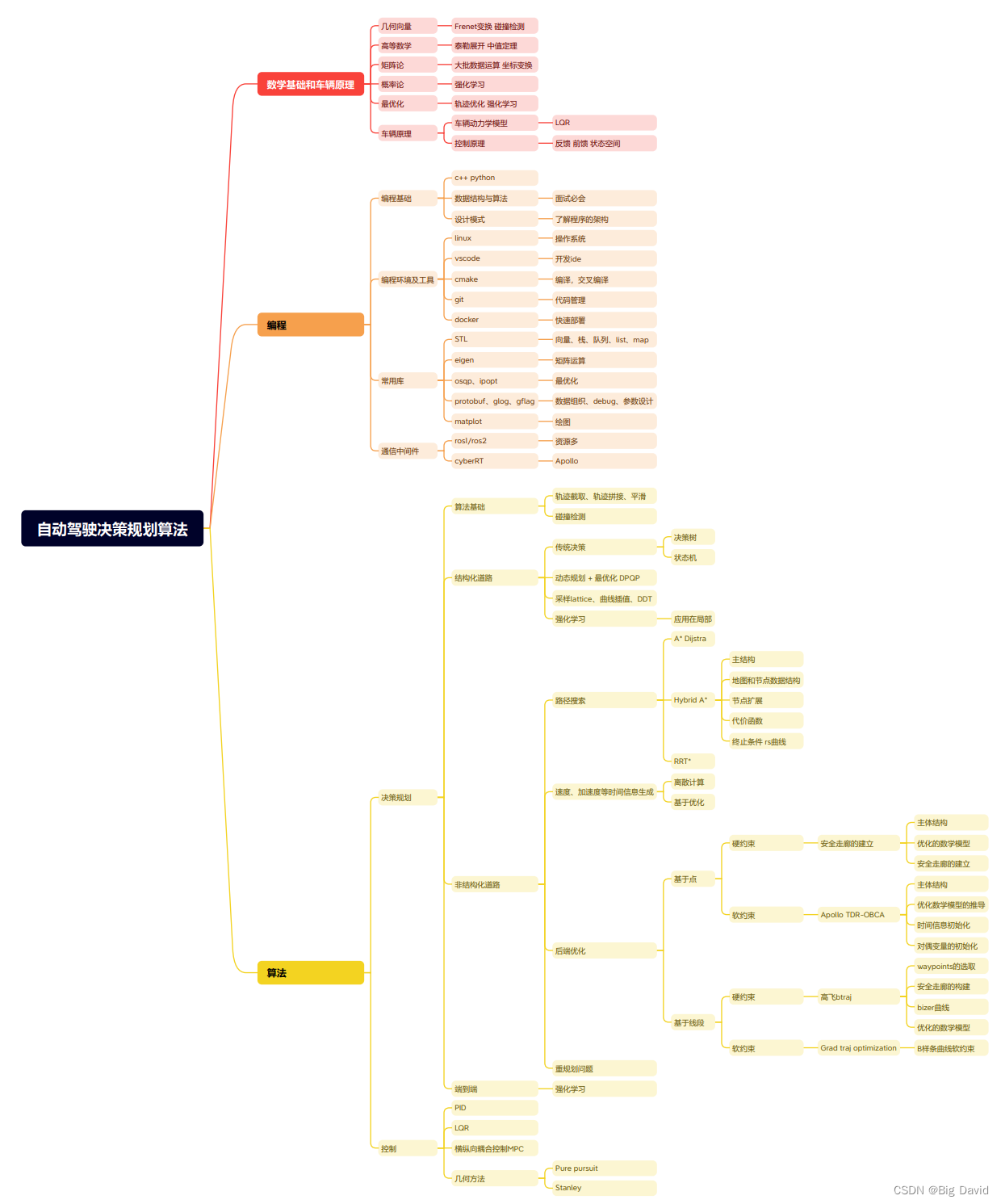
自动驾驶的规划控制是自动驾驶系统中的核心组成部分,它负责生成安全、合理且高效的行驶轨迹,并控制车辆按照这个轨迹行驶。规划控制分为几个层次,通常包括行为决策(Behavior Planning)、轨迹规划(Trajectory Planning)和运动控制(Motion Control)。
- 行为决策(Behavior Planning):
- 行为决策层负责确定车辆的行驶目标,比如在交叉路口是直行、左转还是右转,以及如何响应交通信号和周围车辆的行为。
- 这一层通常涉及复杂的决策树或机器学习算法,用以处理不同的交通场景和规则。
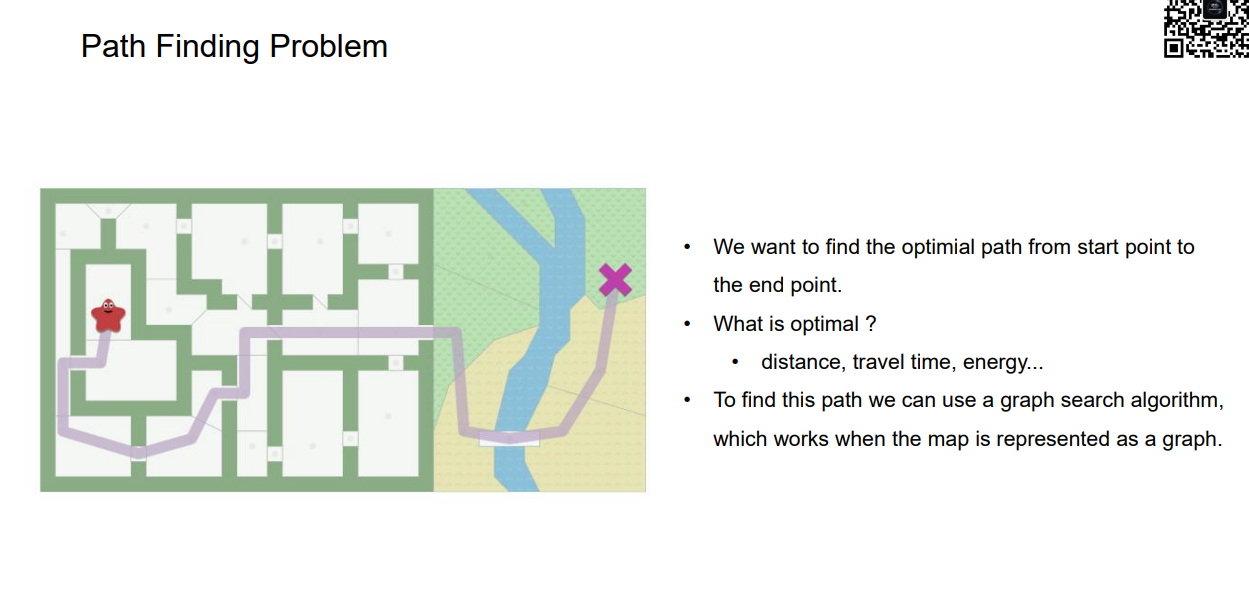
- 轨迹规划(Trajectory Planning):
- 轨迹规划层负责根据行为决策的结果生成一条具体的行驶轨迹。这条轨迹需要避开障碍物,符合交通规则,并且在舒适性和安全性之间取得平衡。
- 常用的轨迹规划方法包括基于搜索的算法(如A*算法)、基于模型的优化方法(如模型预测控制MPC)和基于采样的方法(如RRT算法)。
- 运动控制(Motion Control):
- 运动控制层负责将轨迹规划层生成的理想轨迹转化为车辆的实际运动。它需要控制车辆的加速、制动和转向,确保车辆能够精确地跟踪规划出的轨迹。
- 运动控制通常涉及到控制理论,如PID控制、模糊控制和自适应控制等。
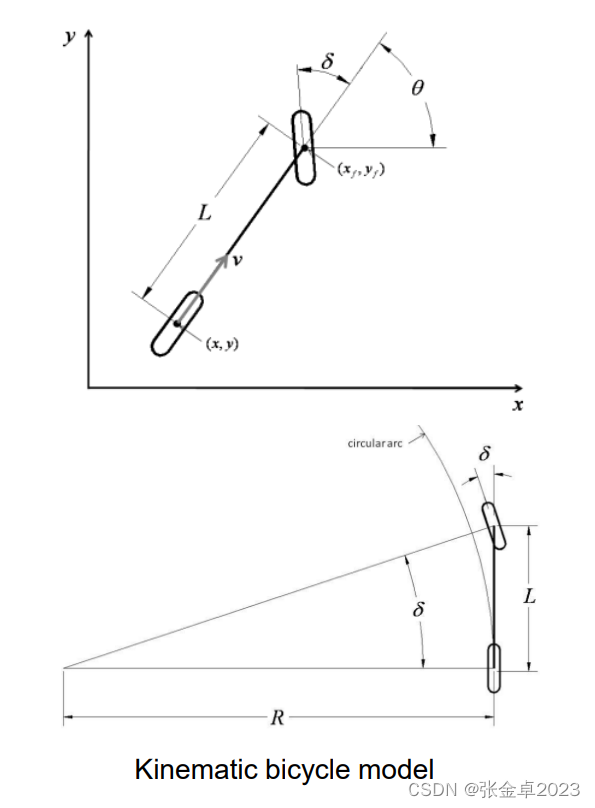
在自动驾驶的规划控制中,还需要考虑传感器数据融合、车辆动力学模型、实时性与计算资源限制、以及与其他车辆的通信等多个方面。随着技术的不断进步,自动驾驶的规划控制也在不断地发展和完善,以提高自动驾驶的安全性和可靠性。