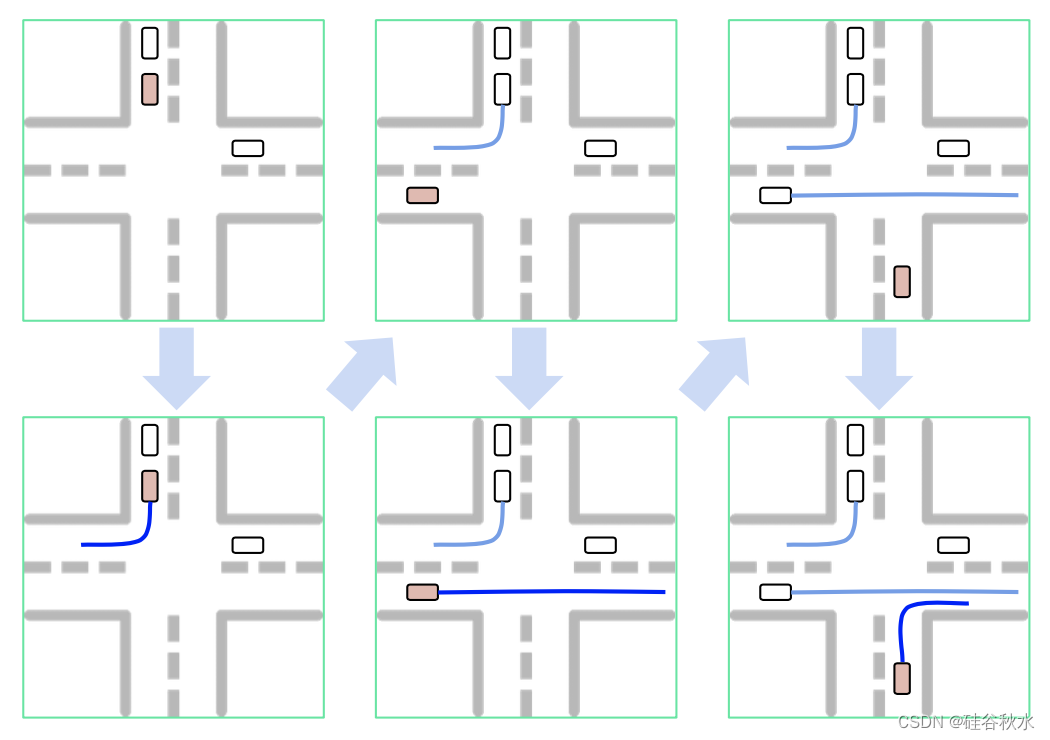
在移动机器人领域,路径(Path)和轨迹(Trajectory)是两个紧密相关但又有所区别的概念。
路径 是机器人从起点到终点的一系列点的序列,它只考虑了位置信息,而不考虑时间信息。路径描述了机器人将要经过的位姿(位置和方向),但不涉及机器人如何在这些位姿之间移动,也就是说,路径不包含速度、加速度等动态信息。路径可以是任何形式的,比如直线、曲线或者由多个线段组成的折线。
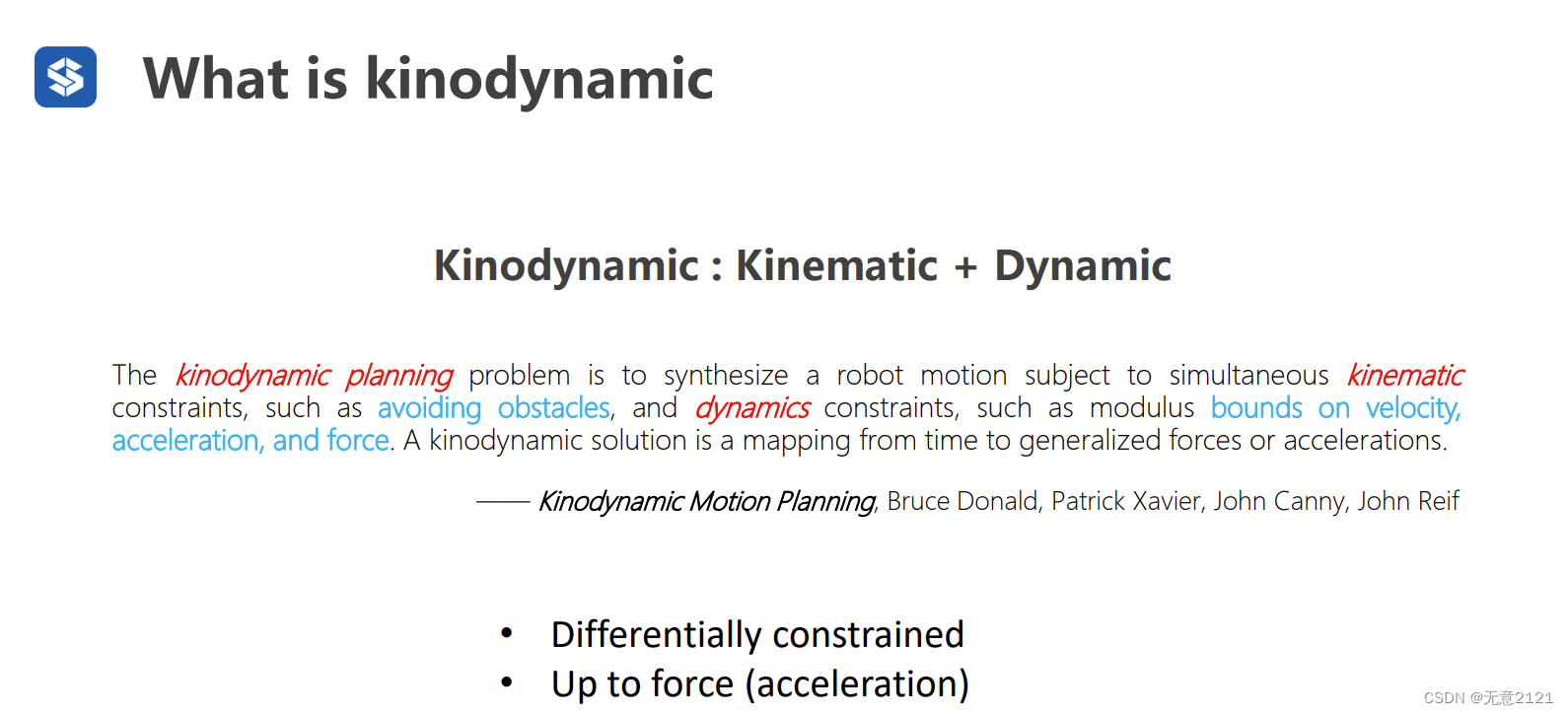
轨迹 则是路径的动态版本,它不仅包含了位置信息,还包含了时间信息。轨迹描述了机器人随时间变化的一系列位姿,包括何时到达每个位姿以及如何从一个位姿移动到下一个位姿。因此,轨迹考虑了速度、加速度、加加速度(jerk)等动态参数,它是时间的函数。
以下是对两者区别的详细说明:
时间因素:
- 路径:不考虑时间因素,只关心机器人的位置。
- 轨迹:考虑时间因素,包含速度、加速度等动态信息。
描述的详细程度:
- 路径:较为简单,只描述“去哪里”。
- 轨迹:更为详细,描述“去哪里”以及“如何去”。
规划与执行:
- 路径规划:通常是在不考虑动态约束的情况下进行的,目的是找到一条从起点到终点的无碰撞路径。
- 轨迹规划:需要考虑机器人的动力学特性,确保机器人能够按照规划的轨迹平稳、安全地移动。
实际应用:
- 路径:在实际应用中,路径规划通常是一个初步步骤,之后需要根据路径生成满足运动学或动力学约束的轨迹。
- 轨迹:是直接用于控制机器人移动的实际指令。
在移动机器人导航和控制中,理解路径和轨迹的区别对于设计有效的路径规划器和运动控制器至关重要。正确处理这两者之间的关系,可以确保机器人既能够高效地完成任务,又能在执行过程中保持稳定和安全。

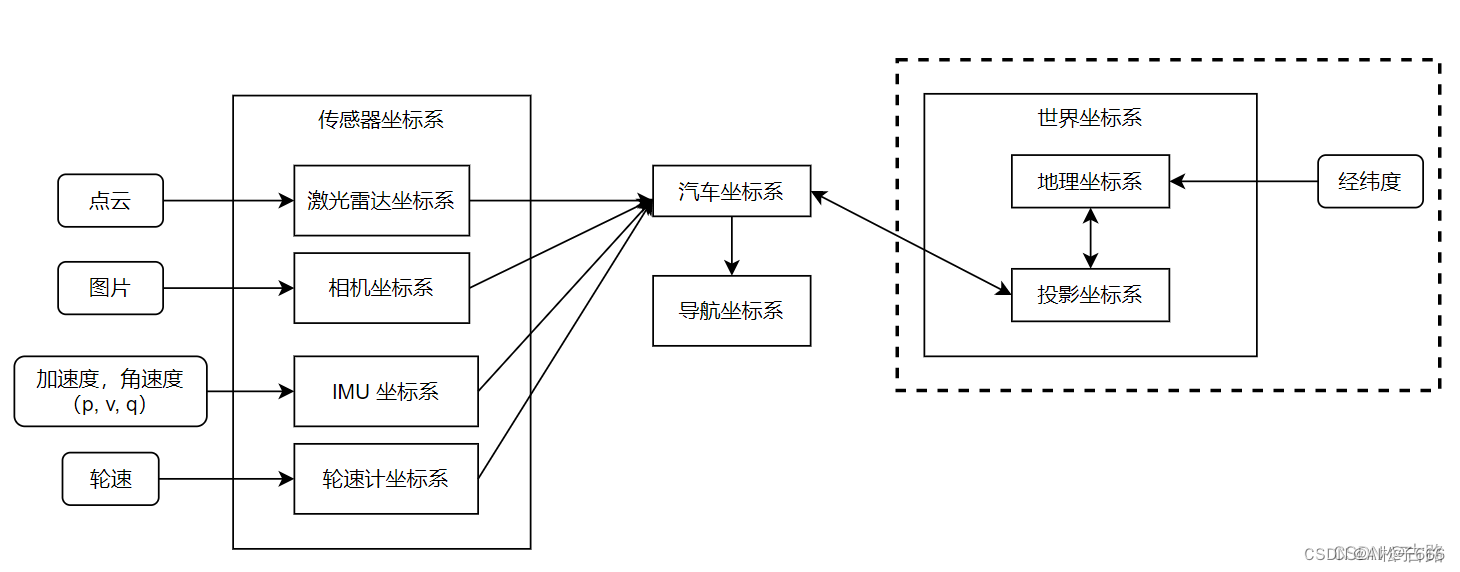
![[<span style='color:red;'>自动</span><span style='color:red;'>驾驶</span>算法][从0开始<span style='color:red;'>轨迹</span>预测]:二、<span style='color:red;'>自动</span><span style='color:red;'>驾驶</span>系统<span style='color:red;'>中</span>常用<span style='color:red;'>的</span>坐标系及相应<span style='color:red;'>的</span>转换关系](https://img-blog.csdnimg.cn/img_convert/e45a9fc643ece62caead6184e79adb2e.png)