LiDAR(光检测与测距)和Radar(无线电波检测与测距)是两种不同的遥感技术,它们在原理和应用上存在一些区别:
原理上的区别:
LiDAR:
- 利用激光脉冲进行测距。
- 通过测量激光从发射到反射回来的时间来计算距离。
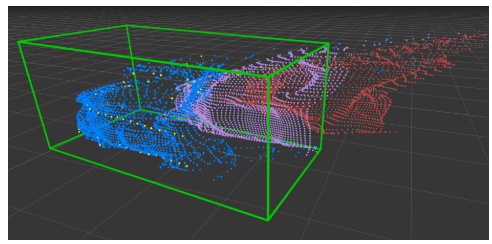
- 可以生成高精度的三维点云数据。
Radar: - 利用无线电波进行测距。
- 通过测量无线电波的反射波与发射波之间的相位差来计算距离。
- 可以在恶劣天气条件下工作,因为无线电波能穿透云、雾、雨等。
波长和分辨率:
LiDAR:
- 波长较短,通常在紫外、可见光或近红外波段。
- 分辨率高,可以达到厘米级别。
Radar: - 波长较长,通常在微波波段。
- 分辨率相对较低,但覆盖范围广。
应用领域的区别:
LiDAR:
- 地形测绘:高精度地形图的生成。
- 林业管理:树木高度的测量和生物量的估算。
- 城市规划:建筑物和基础设施的三维建模。
- 自动驾驶汽车:用于环境感知和障碍物检测。
Radar:
- 气象监测:降雨量、风速等天气参数的测量。
- 航空航海:用于飞机和船只的导航。
- 军事应用:目标检测、跟踪和识别。
- 交通监控:车辆速度和流量的监测。
环境适应性:
LiDAR:
- 在能见度好的条件下效果最佳。
- 易受烟雾、灰尘、雨雾等天气条件影响。
Radar:
- 在各种天气条件下都能工作,包括夜间和恶劣天气。
- 对小尺寸物体或非金属物体的检测能力较弱。
两者各有优势,选择哪一种技术取决于具体的应用需求和操作环境。在某些情况下,LiDAR和Radar技术也会结合使用,以取长补短,提供更准确和全面的数据。