一、入门
1.引入
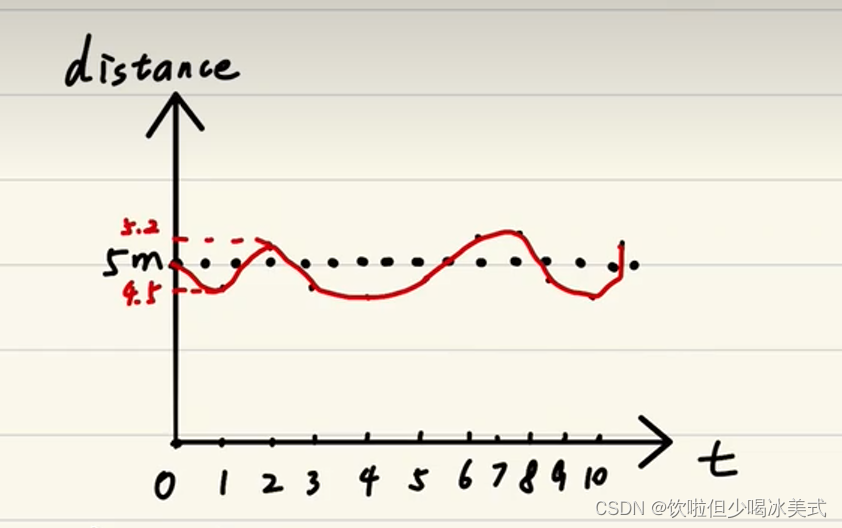
假设超声波距离传感器每1ms给单片机发数据。
理论数据为黑点, 测量数据曲线为红线,引入滤波后的数据为紫线
引入滤波的作用是过滤数据中的噪声,使信号更趋于真实值。

2.卡尔曼滤波适用系统
卡尔曼滤波适用于线性高斯系统
2.1线性的理解
线性满足叠加性与齐次性。
如何理解叠加性?

如何理解齐次性?

输入x增大k倍,输出y也增大k倍
2.2高斯的理解
高斯:噪声满足正态分布

3.宏观意义:滤波即加权
理想状态:信号*1 +噪声*0(数字表示权值)
低通滤波:低频信号*1 + 高频信号*0
卡尔曼滤波:估计值*(待选择)+观测值*(待选择);选择估计值与观测值的权重,总体得到一个最佳修正值。
二、进阶(基本滤波知识)
1.状态空间表达式(便于之后卡尔曼滤波公式的理解)
状态方程
其中,是当前状态的当前值;
是上一个时刻该状态的值;
是检测输入;
是过程噪声;A是一个状态转移矩阵(用于刻画系统从一个状态转移到另一个状态的概率);B是一个控制矩阵。
观测方程
其中,是要观测的值;
是观测噪声(与观测器的误差有关);
举例

加热一壶水,温度计观测到的温度与水温状态的关系C=1,当前温度计测量的温度=当前状态的当前水温
+温度计的误差
,A取单位矩阵,
为每一时刻会增加多少度,
是过程噪声(比如加热过程中环境温度的影响),观测方程为
状态方程为
2.高斯分布
2.1直观图解

在二维和三维中,不管这些点投影到x轴、y轴还是z轴,都是正态分布
2.2参数分析
2.2.1  和
和
:
符合正态分布,均值为0,方差为
:
符合正态分布,均值为0,方差为
统称以上两个为高斯白噪声
举例
假设车的位置移动了1000m,GPS检测值为,方差为1m噪声
则=
,
=1m
假设车速是3000m/s,在风速的作用下,GPS的检测值为
则=
m/s,n服从正态分布,方差
=1m/s
2.2.2 方差

二维协方差(多维也类似)

3.超参数
Q、R、N PID
之后主要调的是Q和R(上面提到的方差)
4.卡尔曼直观图解
x轴是位置,y轴是概率密度,是后验估计值,也叫最优估计值(修正值),
是先验估计值,
是观测值,
是当前的最优估计值

:卡尔曼滤波最终输出的值
:根据
估计出来的一个当前的估计值
:是由先验估计值和当前观测值取共有部分得到的