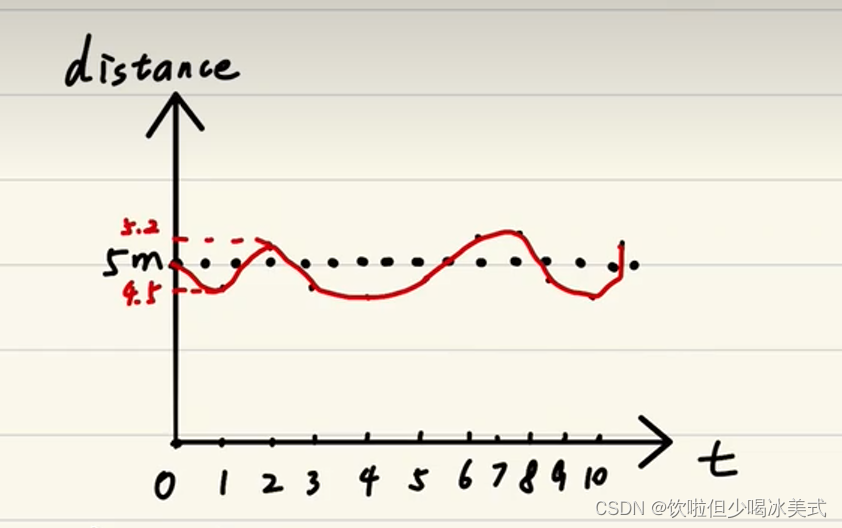
核心思想:根据当前的仪器"测量值" 和上一刻的 “预测量” 和 “误差”,计算得到当前的最优量,再预测下一刻的量。里面比较突出的是观点是:把误差纳入计算,而且分为预测误差和测量误差两种,通称为噪声。还有一个非常大的特点是:误差独立存在,始终不受测量数据的影响。
优点:巧妙的融合了观测数据与估计数据,对误差进行闭环管理,将误差限定在一定范围。适用性范围很广,时效性和效果都很优秀。
缺点:需要调参,参数的大小对滤波的效果影响较大。

卡尔曼滤波有一定的去噪稳定特性的,虽然效果不是特别优秀。卡尔曼滤波的普适性很强,尤其在控制与多传感器融合方向,只要参数调整的好,效果出奇优秀。
class KalmanFilter:
def __init__(self, q=0.001, r=0.001):
self.q = q # 过程噪声协方差
self.r = r # 测量噪声协方差
self.p = 5 # 估计误差协方差
self.k_gain = 0 # 卡尔曼增益
self.prev_data = 0 # 先前数据值
def update(self, measurement):
# 预测
self.p += self.q
# 计算卡尔曼增益
self.k_gain = self.p / (self.p + self.r)
# 更新估计值
estimation = self.prev_data + self.k_gain * (measurement - self.prev_data)
# 更新估计误差协方差
self.p = (1 - self.k_gain) * self.p
# 更新先前数据值
self.prev_data = estimation
return estimation
# 测试
kf = KalmanFilter(q=0.001, r=0.001)
input_data = 5
filtered_data = kf.update(input_data)
print("滤波后的值:", filtered_data)
import numpy as np
import matplotlib.pyplot as plt
# 生成模拟传感器数据(示例数据)
np.random.seed(123456)
sensor_data = np.random.randn(200) # 正态分布随机数据
n = 11 # 在多少个数中取中间值,必须为奇数
filtered_sensor_data = np.zeros_like(sensor_data)
for i in range(1,len(sensor_data)):
src_data = sensor_data[i]
filtered_sensor_data[i] = kf.update(src_data)
# 绘制原始数据和滤波后数据
plt.figure(figsize=(10, 6))
plt.plot(sensor_data,c="green")
plt.plot(filtered_sensor_data,c="red")
plt.show()




























![YOLOv9有效改进专栏汇总|未来更新卷积、主干、检测头注意力机制、特征融合方式等创新![2024/3/23]](https://img-blog.csdnimg.cn/direct/c10d4a2a12624777a3b3d34e83db6757.png)