文章目录
前言
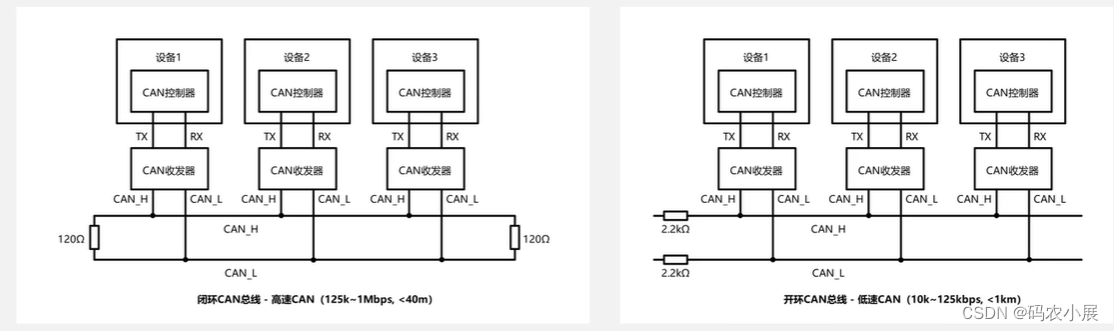
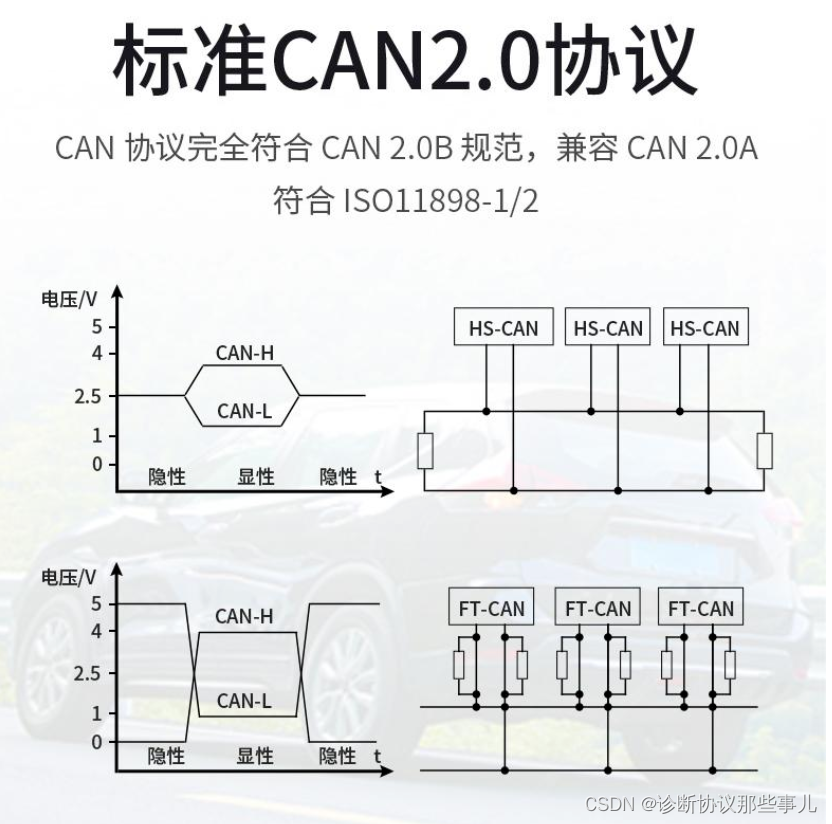
CAN2.0协议是控制器局域网络(Controller Area Network, CAN)的一种版本,也被称为传统CAN协议,由德国博世BOSCH公司开发,并已成为国际上广泛应用于汽车电子、工业自动化控制以及其他分布式控制系统中的现场总线标准之一。CAN分为两种版本,即CAN 2.0A和CAN 2.0B。
一、CAN 2.0A
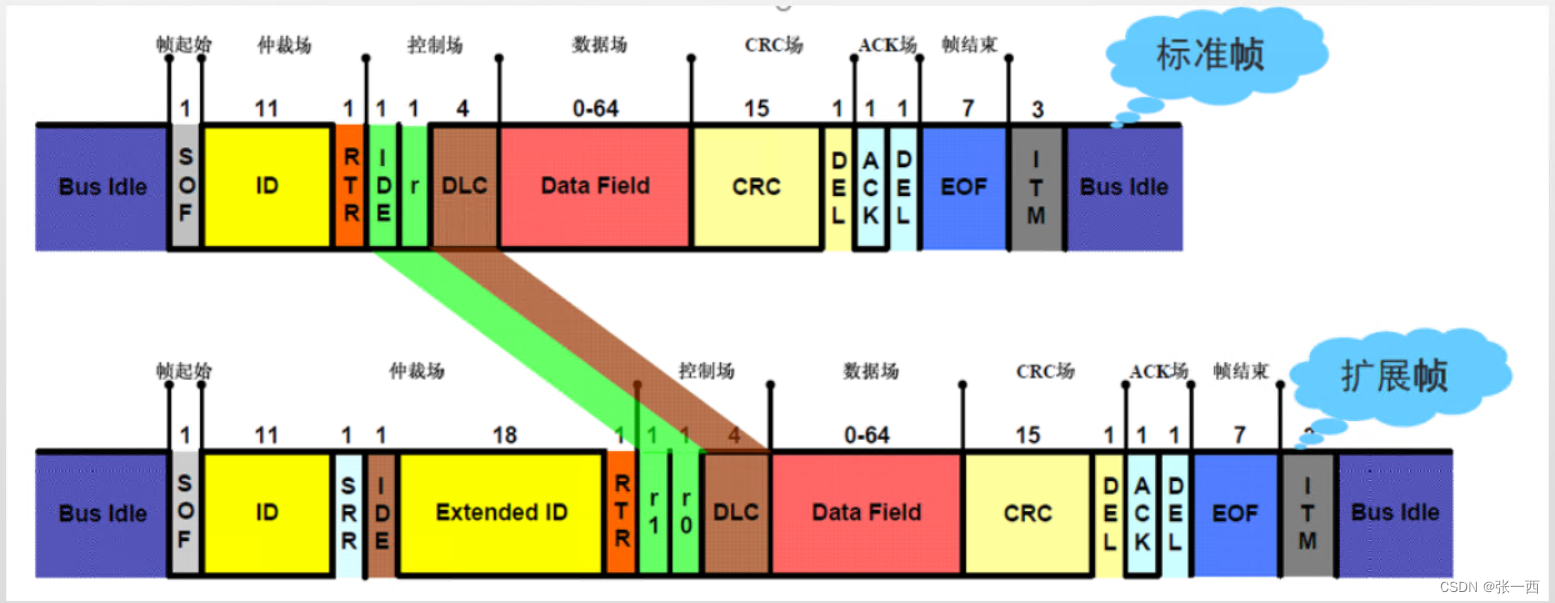
CAN2.0A支持标准帧格式(Standard Frame Format),这种格式的标识符长度为11位,适用于不需要大量节点或者复杂网络结构的应用场景。
二、CAN 2.0B
除了支持标准帧格式之外,CAN2.0B还引入了扩展帧格式(Extended Frame Format),其标识符长度增加到29位,这极大地扩展了网络中可寻址节点的数量和数据的多样性,解决了CAN网络中可能存在的标识符资源不足的问题。
三、差异点
(1)帧格式:CAN 2.0A和CAN 2.0B使用不同的帧格式。CAN 2.0A使用标准帧格式(11位标识符),而CAN 2.0B使用扩展帧格式(29位标识符)。扩展帧格式提供了更大的地址空间,可以支持更多的节点。
(2)标识符长度:CAN 2.0A的标识符长度为11位,而CAN 2.0B的标识符长度为29位。标识符用于唯一标识CAN网络中的消息。
(3)传输速率:CAN 2.0A和CAN 2.0B可以以不同的传输速率进行通信。CAN 2.0A支持最高传输速率为1 Mbps,而CAN 2.0B支持最高传输速率为5 Mbps。
(4)错误检测:CAN 2.0A和CAN 2.0B在错误检测机制上也有所不同。CAN 2.0A使用CRC(循环冗余校验)进行错误检测,而CAN 2.0B使用CRC和**ACK(确认应答)**进行错误检测和错误恢复。