笔者来聊一下CAN协议帧的认识和错误处理。
1、CAN协议帧认识
CAN 差分信号,是经过CAN收发器转成差分信号的,CAN RX和TX是逻辑电平。CAN的基础知识,可参考笔者这边文章:ARM学习(21)STM32 外设Can的认识与驱动编写。
CAN总线上面要接120欧姆的电阻,形成闭环。
CAN的总线电平:
- 显性0,CAN-H 3.5V,CAN-L 1.5V
- 隐形1,CAN-H 2.5V,CAN-L 2.5V,
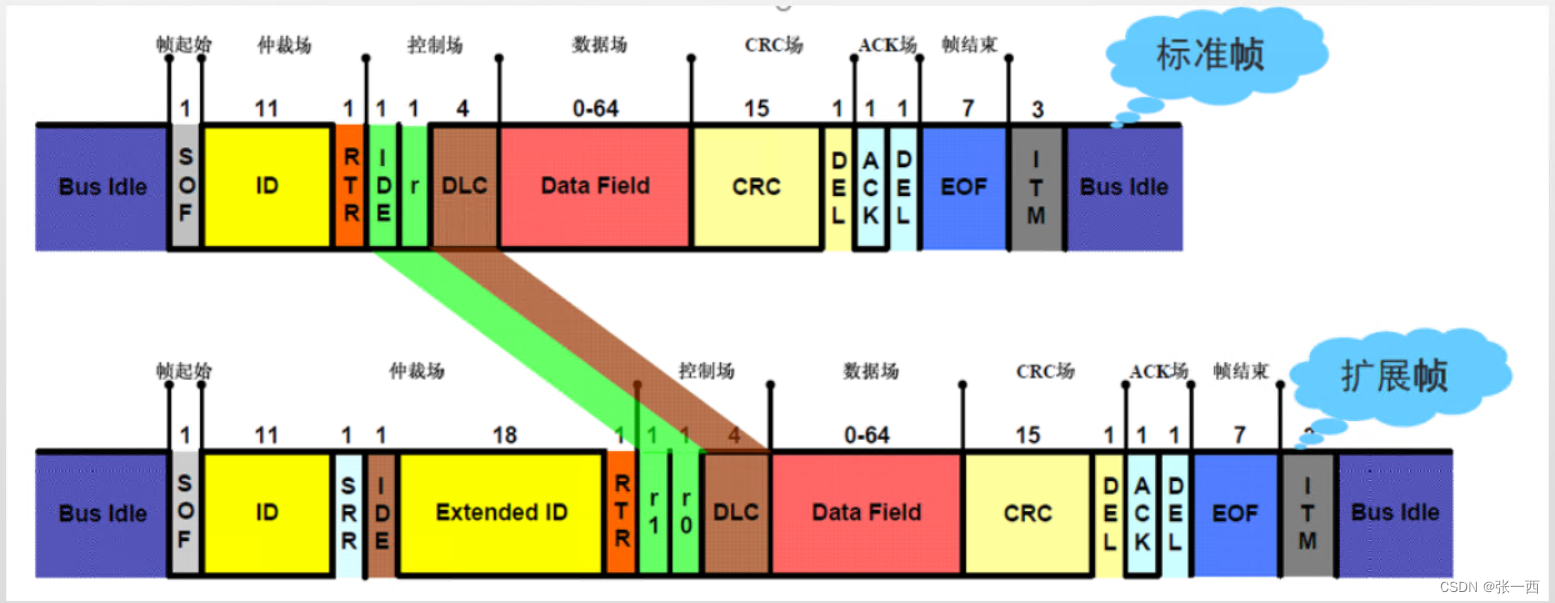
CAN的协议帧主要有:
- 帧开始:SOF,数据帧开始
- 仲裁段:帧ID,根据ID进行仲裁
- 控制段:数据长度等
- 数据段:数据域,8字节,不够会填满发送,所以需要长度指定。
- CRC段:对前面的字段进行CRC校验
- ACK段:发送完成后,有节点接收会被拉低,
- 帧结束:EOF,帧结束
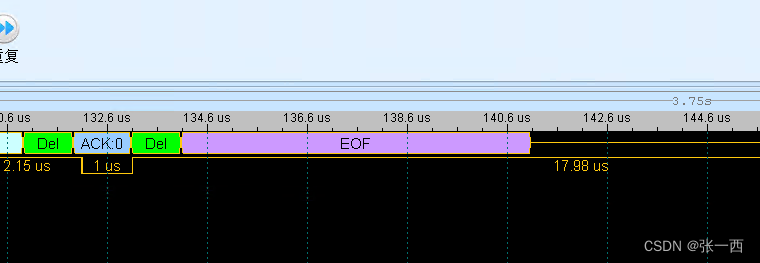
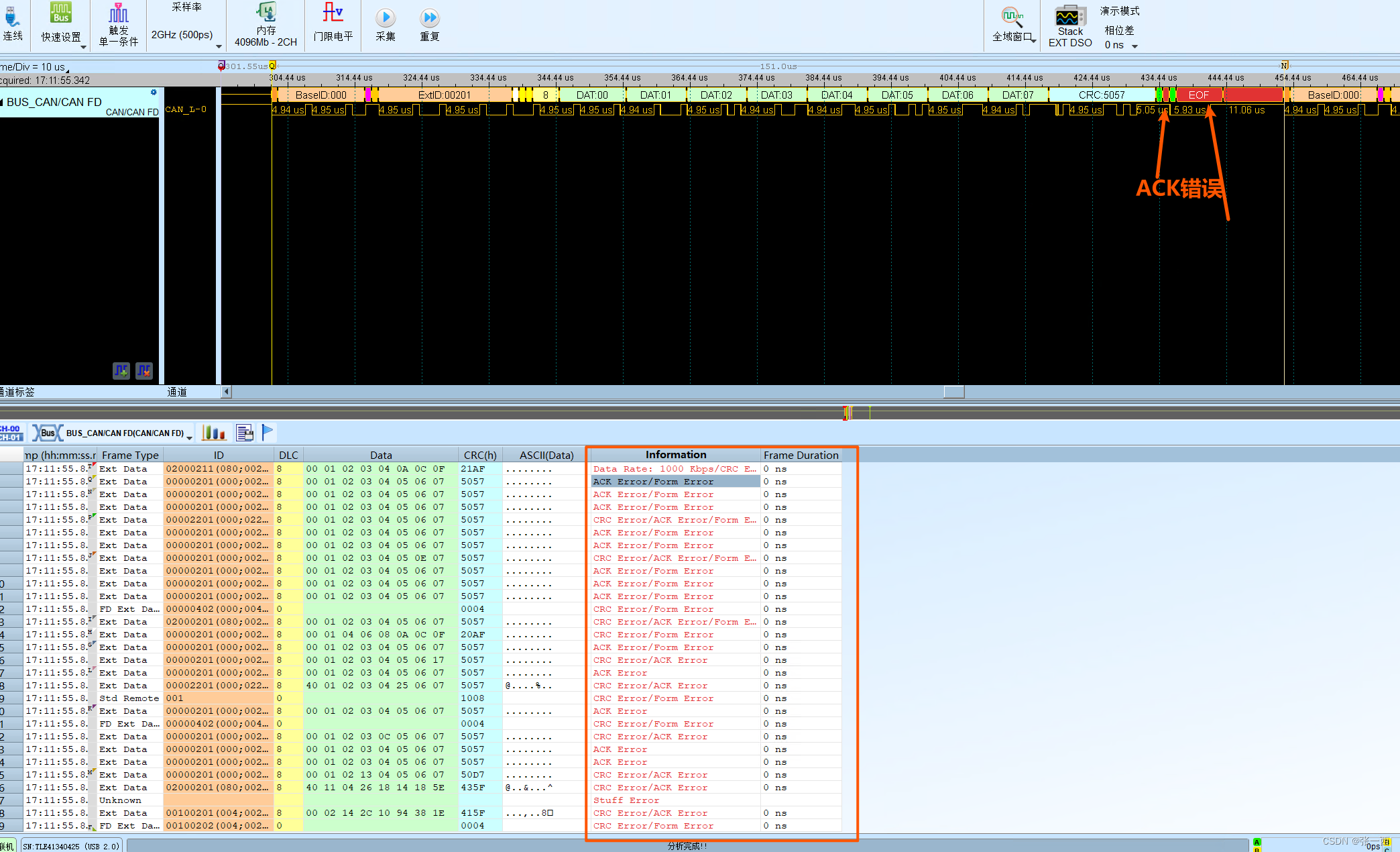
逻辑分析仪抓到的CAN协议帧:

下面是:帧起始,ID,控制段

中间是:数据段和CRC段

最后是:ACK段和帧结束
2、CAN异常处理
2.1 CAN异常介绍
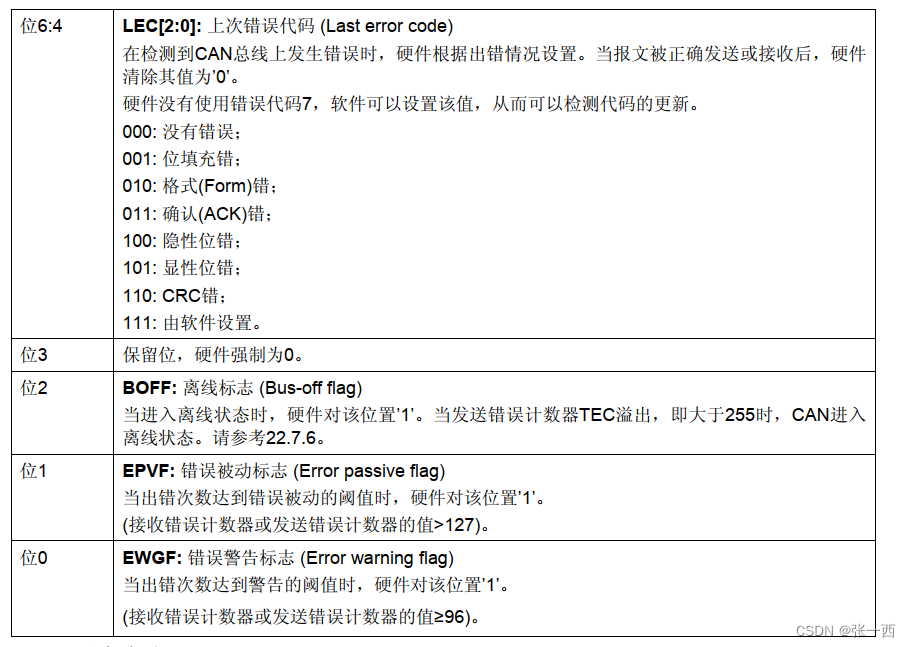
CAN异常处理,首先得知道CAN有哪些异常,LEC 可以指示错误信息:
- 位填充错误
- 格式错误
- 确认错误,没有ACK
- 隐形错误
- 显性错误
- CRC错误。
例如下图:可以看到,标红色的都代表错误,首先CRC错误,然后ACK错误,正常应该是0,EOF尾帧错误,正常应该全1,

如果CAN总线异常,那么可以增加相关寄存器打印,可以知道CAN的错误。
printf("CAN_TX_TIMEOUT, ESR=0x%x, TSR=0x%x, IER=0x%x\r\n",CAN2->ESR,CAN2->TSR,CAN2->IER);

当然也可以通过中断触发,但是中断触发有个问题,如果总线一直异常,那么会一直触发,导致持续进中断,程序无法正常运行。
关于CAN异常中断的配置,首先需要知道异常会触发哪个中断,然后需要使能相应的中断源,以及中断函数。
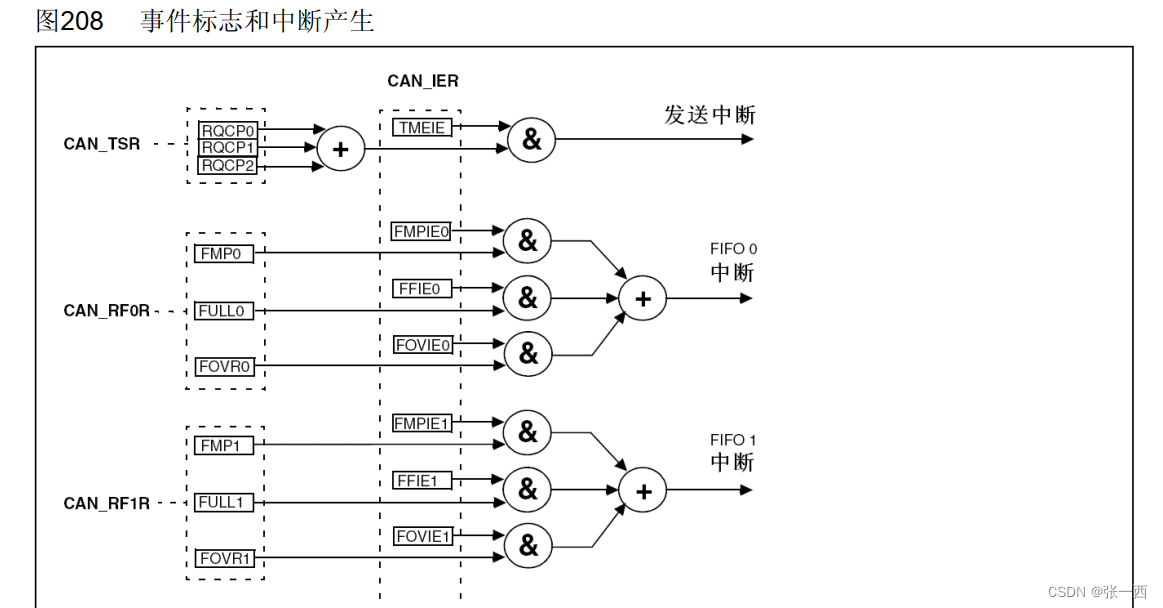
CAN共计四个中断,前三个中断很容易理解,就是下图的三个中断
- CAN_TX_IRQn:发送中断
- CAN_RX0_IRQn:FIFO0的接收中断
- CAN_RX1_IRQn:FIFO1的接收中断
- CAN_SCE_IRQn:不知道什么中断
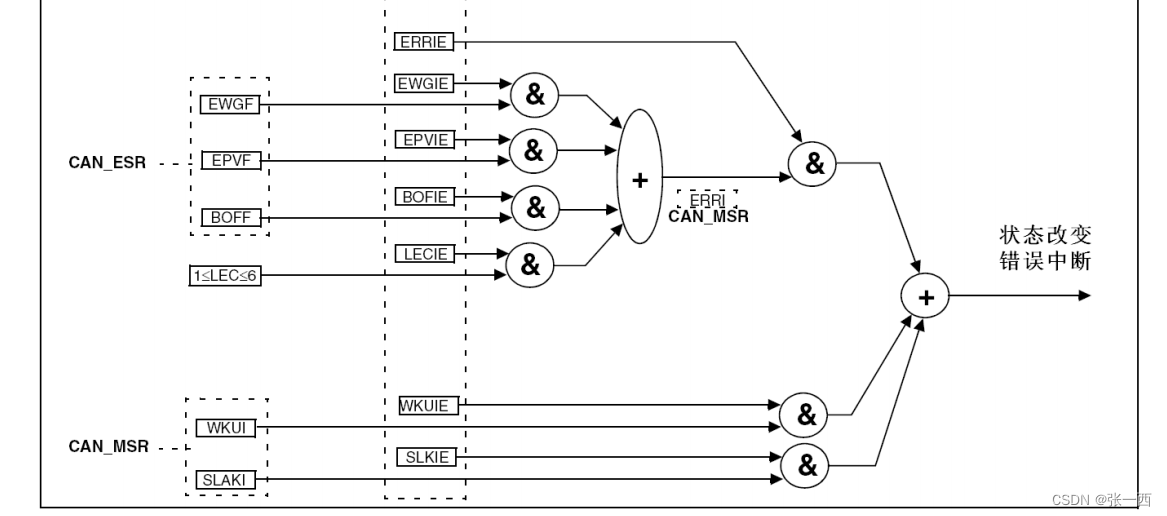
然后下面还要一张图,显示了CAN异常触发的中断,ESR:Error State Register,异常状态寄存器,每一位都有使能位控制,左边是中断源,中间是中断控制,右边是中断处理函数,状态改变错误中断,即State Change Error Handler,SCE_Handler,所以通过这张图我们就确定了异常处理的中断函数。
- 使能中断源
......
CAN_ITConfig(CAN2, CAN_IT_ERR);
CAN_ITConfig(CAN2, CAN_IT_EWG);
CAN_ITConfig(CAN2, CAN_IT_EPV);
CAN_ITConfig(CAN2, CAN_IT_BOF);
CAN_ITConfig(CAN2, CAN_IT_LEC);
- 使能NVIC 中断函数
NVIC_InitStructure.NVIC_IRQChannel = CAN2_SCE_IRQn;
NVIC_InitStructure.IRQChannelCmd =ENABLE;
NVIC_Init(&NVIC_InitStructure);
- 中断函数处理
void CAN2_SCE_IRQHandler(void)
{
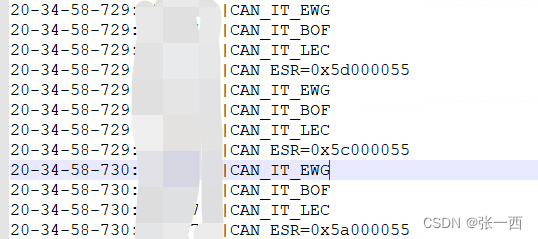
printf("CAN ESR=0x%x\r\n",CAN2->ESR);
CAN_ClearITPendingBit(CAN2, CAN_IT_ERR);
CAN_ClearITPendingBit(CAN2, CAN_IT_EWG);
CAN_ClearITPendingBit(CAN2, CAN_IT_EPV);
CAN_ClearITPendingBit(CAN2, CAN_IT_BOF);
CAN_ClearITPendingBit(CAN2, CAN_IT_LEC);
}
2.2 CAN 异常造错
实验一:CAN总线只有一个节点
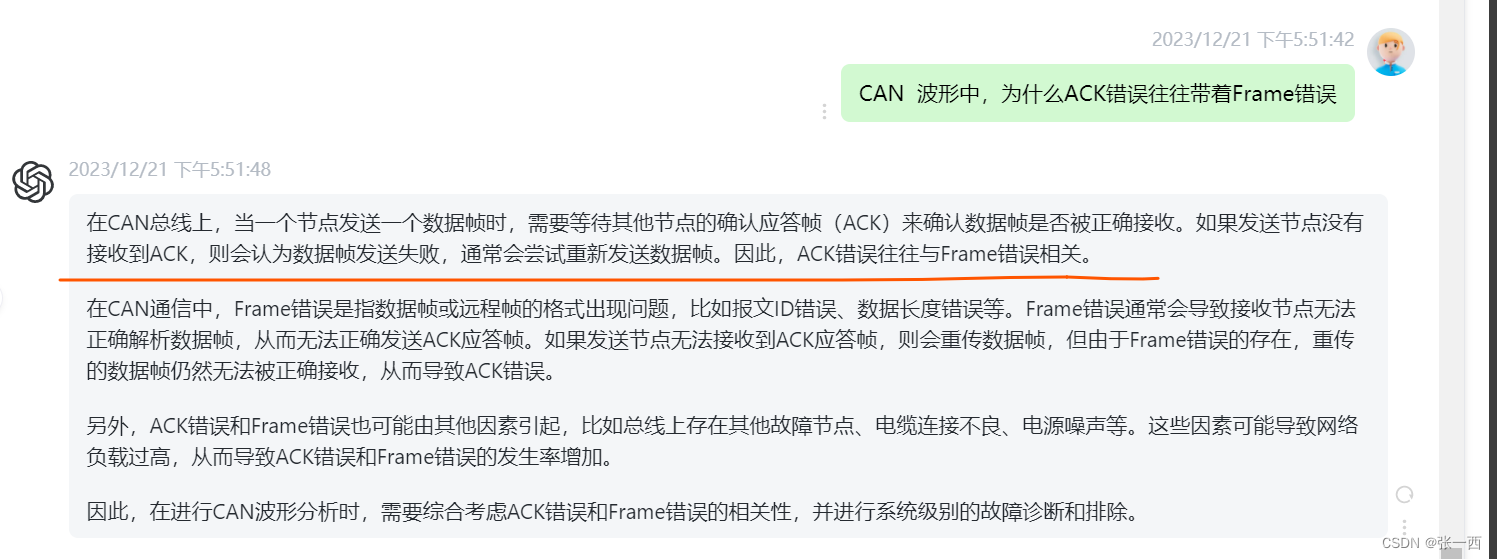
按理说只有一个节点的时候,肯定会报ACK错误,因为没有节点回,将ACK信号拉低,但是测试结果发现,同时还伴有帧格式错误,还有少量的CRC错误,查阅资料发现,可能确实会存在帧格式错误,
实验二:CAN 总线上面发送了一个不存在节点的报文
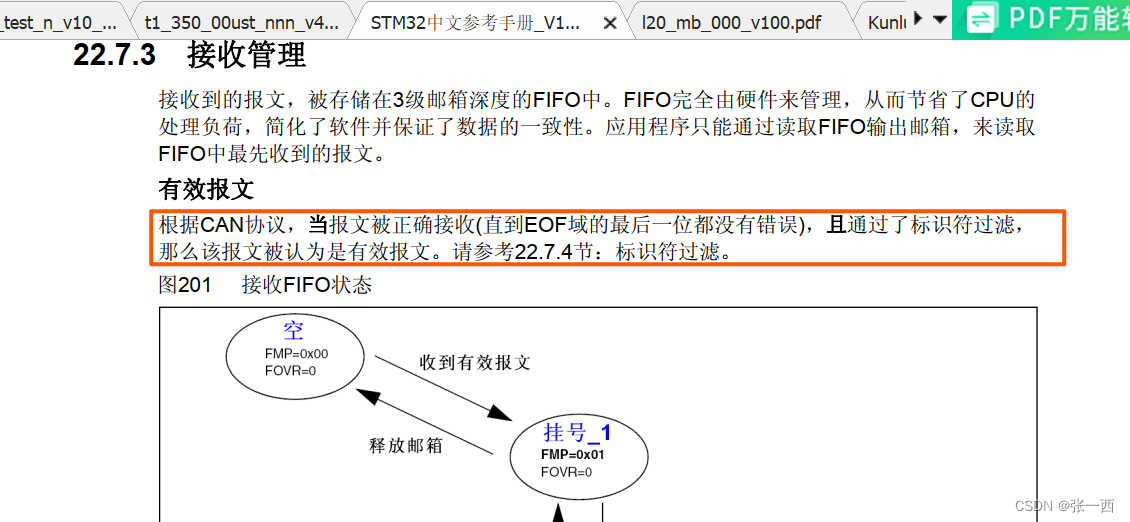
一切正常,查阅资料发现,自由有节点接收,那么报文就正确发送,接收段由于过滤规则过滤掉是接收端的问题,那么ACK就会正确回,所以报文正常。
实验三:CAN H接地
发送失败,CAN离线,实验四:CAN L接地
正常发送实验五:CAN H与L短接
发送失败,CAN离线