对于can的驱动函数文件加注释。在can(加注释).c中标了“//2024.6”的语句加以理解并写出注释。放入博客中。
//======================================================================
//文件名称:can.c
//功能概要:uart底层驱动构件源文件
//版权所有:苏州大学嵌入式系统与物联网研究所(sumcu.suda.edu.cn)
//更新记录:2021-02-03 V1.0 JJL
//======================================================================
#include "can.h"
CAN_TypeDef *CAN_ARR[] = {(CAN_TypeDef*)CAN1_BASE};
IRQn_Type table_irq_can[2] = {CAN1_RX0_IRQn, CAN1_RX1_IRQn};
uint8_t can_send_once(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff);
uint8_t CAN_HWInit(uint8_t CANChannel);
uint8_t CAN_SWInit_Entry(uint8_t canNo);
void CAN_SWInit_CTLMode(uint8_t canNo);
void CAN_SWInit_BT(uint8_t canNo, uint32_t CANMode, uint32_t Prescaler);
uint8_t CAN_SWInit_Quit(uint8_t canNo);
uint8_t CANFilterConfig(uint8_t canNo, uint32_t canID, uint32_t FilterBank, uint32_t Can_Rx_FifoNo, uint8_t IsActivate, uint32_t FilterMode, uint32_t FilterScale);
//=====================================================================
//函数名称:can_init
//函数返回:无
//参数说明:canNo:模块号,本芯片只有CAN_1
// canID:自身CAN节点的唯一标识,例如按照CANopen协议给出
// BitRate:位速率
//功能概要:初始化CAN模块
//=====================================================================
void can_init(uint8_t canNo, uint32_t canID, uint32_t BitRate)
{
//声明Init函数使用的局部变量
uint32_t CANMode;
uint32_t CANFilterBank;
uint32_t CANFiltermode;
uint32_t CAN_Filterscale;
//给Init函数使用的局部变量赋初值
CANMode = CAN_MODE_NORMAL; //2024.6将CAN模式设置为正常模式
CANFilterBank = CANFilterBank0;
CANFiltermode = CAN_FILTERMODE_IDMASK;
CAN_Filterscale = CAN_FILTERSCALE_32BIT;
//(1)CAN总线硬件初始化
CAN_HWInit(CAN_CHANNEL);
//(2)CAN总线进入软件初始化模式
CAN_SWInit_Entry(canNo);
//(3)CAN总线模式设置
CAN_SWInit_CTLMode(canNo);
//(4)CAN总线位时序配置
CAN_SWInit_BT(canNo,CANMode,BitRate);
//(5)CAN总线过滤器初始化
CANFilterConfig(canNo, canID, CANFilterBank, CAN_RX_FIFO0, 1, CANFiltermode, CAN_Filterscale);
//(6)CAN总线退出软件初始化模式,进入正常模式
CAN_SWInit_Quit(canNo);
}
//=====================================================================
//函数名称:can_send
//函数返回:0=正常,1=错误
//参数说明:canNo:模块号,本芯片只有CAN_1
// DestID:目标CAN节点的唯一标识,例如按照CANopen协议给出
// len:待发送数据的字节数
// buff:待发送数据发送缓冲区首地址
//功能概要:CAN模块发送数据
//=====================================================================
uint8_t can_send(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
{
if(DestID > 0x1FFFFFFFU) return 1;
uint8_t send_length;
for(int i = len; i > 0; i = i-8)
{
send_length = (i>8)?8:i;
if(can_send_once(canNo,DestID,send_length,buff+len-i) == 1) //2024.6调用can_send_once函数发送数据,并检查发送是否失败
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称:can_recv
//函数返回:接收到的字节数
//参数说明:canNo:模块号,本芯片只有CAN_1
// buff:接收到的数据存放的内存区首地址
//功能概要:在CAN模块接收中断中调用本函数接收已经到达的数据
//=====================================================================
uint8_t can_recv(uint8_t canNo, uint8_t *buff)
{
uint8_t len;
uint32_t RxFifo = CAN_RX_FIFO0;
//(1)判断哪个邮箱收到了报文信息
if(RxFifo == CAN_RX_FIFO0)
{
if ((CAN_ARR[canNo-1]->RF0R & CAN_RF0R_FMP0) == 0U) //2024.6检查FIFO0是否有待接收的消息
{
return 1;
}
}
else
{
if ((CAN_ARR[canNo-1]->RF1R & CAN_RF1R_FMP1) == 0U)
{
return 1;
}
}
//(2)获取数据长度
len = (CAN_RDT0R_DLC & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDTR) >> CAN_RDT0R_DLC_Pos; //2024.6
//(3)获取数据帧中的数据
buff[0] = (uint8_t)((CAN_RDL0R_DATA0 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA0_Pos);
buff[1] = (uint8_t)((CAN_RDL0R_DATA1 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA1_Pos);
buff[2] = (uint8_t)((CAN_RDL0R_DATA2 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA2_Pos);
buff[3] = (uint8_t)((CAN_RDL0R_DATA3 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDLR) >> CAN_RDL0R_DATA3_Pos);
buff[4] = (uint8_t)((CAN_RDH0R_DATA4 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA4_Pos);
buff[5] = (uint8_t)((CAN_RDH0R_DATA5 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA5_Pos);
buff[6] = (uint8_t)((CAN_RDH0R_DATA6 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA6_Pos);
buff[7] = (uint8_t)((CAN_RDH0R_DATA7 & CAN_ARR[canNo-1]->sFIFOMailBox[RxFifo].RDHR) >> CAN_RDH0R_DATA7_Pos);
//(4)清除标志位,等待接收下一帧数据
if (RxFifo == CAN_RX_FIFO0)
{
SET_BIT(CAN_ARR[canNo-1]->RF0R, CAN_RF0R_RFOM0); //2024.6清除FIFO0的标志位,表示已经接收了数据
}
else
{
SET_BIT(CAN_ARR[canNo-1]->RF1R, CAN_RF1R_RFOM1);
}
return len;
}
//=====================================================================
//函数名称:CAN_enable_re_int
//函数返回:无
//参数说明:canNo:模块基地址号,Can_Rx_FifoNo:中断使用的邮箱号
//功能概要:CAN接收中断开启
//=====================================================================
void can_enable_recv_int(uint8_t canNo)
{
uint8_t Can_Rx_FifoNo;
Can_Rx_FifoNo = CAN_RX_FIFO0;
if(Can_Rx_FifoNo == CAN_RX_FIFO0)
SET_BIT(CAN_ARR[canNo-1]->IER, CAN_IER_FMPIE0); //2024.6 根据Can_Rx_FifoNo判断使用的邮箱是FIFO0还是FIFO1,并开启相应的接收中断
else
SET_BIT(CAN_ARR[canNo-1]->IER,CAN_IER_FMPIE1);
NVIC_EnableIRQ(table_irq_can[Can_Rx_FifoNo]); //2024.6 使能相应的中断向量
}
//=====================================================================
//函数名称:can_disable_recv_int
//函数返回:无
//参数说明:canNo:模块号,本芯片只有CAN_1
//功能概要:关闭CAN接收中断
//=====================================================================
void can_disable_recv_int (uint8_t canNo)
{
uint8_t Can_Rx_FifoNo;
Can_Rx_FifoNo = CAN_RX_FIFO0;
if(Can_Rx_FifoNo == CAN_RX_FIFO0)
CLEAR_BIT(CAN_ARR[canNo-1]->IER, CAN_IER_FMPIE0);
else
CLEAR_BIT(CAN_ARR[canNo-1]->IER,CAN_IER_FMPIE1);
NVIC_DisableIRQ(table_irq_can[Can_Rx_FifoNo]);
}
//=====================================================================
//函数名称:can_send_once
//函数返回:0=正常,1=错误
//参数说明:canNo:模块号,本芯片只有CAN_1
// DestID:目标CAN节点的唯一标识,例如按照CANopen协议给出
// len:待发送数据的字节数
// buff:待发送数据发送缓冲区首地址
//功能概要:CAN模块发送一次数据
//=====================================================================
uint8_t can_send_once(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
{
//(1)定义Can发送函数所需要用到的变量
uint32_t transmit_mailbox;
uint32_t register_tsr;
uint32_t rtr;
rtr = CAN_RTR_DATA;
register_tsr = READ_REG(CAN_ARR[canNo-1]->TSR);
//(2)判断3个邮箱中是否有空闲邮箱,若有,选取其中一个进行发送,选取顺序为1,2,3
if (((register_tsr & CAN_TSR_TME0) != 0U) ||
((register_tsr & CAN_TSR_TME1) != 0U) ||
((register_tsr & CAN_TSR_TME2) != 0U))
{
transmit_mailbox = (register_tsr & CAN_TSR_CODE) >> CAN_TSR_CODE_Pos; //2024.6从 register_tsr 变量中提取出发送邮箱号码
if(transmit_mailbox > 2U)
{
return 1;
}
//(2.1)判断并设置发送帧为标准帧还是扩展帧
if(DestID <= 0x7FFU) //2024.6检查目标CAN节点的标识符 DestID 是否小于等于标准帧的最大标识符 0x7FFU。如果满足条件,说明 DestID 是一个标准帧的标识符
{
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR = ((DestID << CAN_TI0R_STID_Pos)|CAN_ID_STD|rtr); //2024.6设置发送邮箱的传输标识符(TIR)为标准帧格式
}
else
{
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR = ((DestID << CAN_TI0R_EXID_Pos)|CAN_ID_EXT|rtr); //2024.6设置发送邮箱的传输标识符(TIR)为扩展帧格式
}
//(2.2)设置发送帧的数据长度
CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDTR = len;
//SET_BIT(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDTR, CAN_TDT0R_TGT);
//(2.3)设置发送帧的数据
WRITE_REG(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDHR, //2024.6将发送数据写入发送邮箱的数据寄存器
((uint32_t)buff[7] << CAN_TDH0R_DATA7_Pos) |
((uint32_t)buff[6] << CAN_TDH0R_DATA6_Pos) |
((uint32_t)buff[5] << CAN_TDH0R_DATA5_Pos) |
((uint32_t)buff[4] << CAN_TDH0R_DATA4_Pos));
WRITE_REG(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TDLR,
((uint32_t)buff[3] << CAN_TDL0R_DATA3_Pos) |
((uint32_t)buff[2] << CAN_TDL0R_DATA2_Pos) |
((uint32_t)buff[1] << CAN_TDL0R_DATA1_Pos) |
((uint32_t)buff[0] << CAN_TDL0R_DATA0_Pos));
//(2.4)发送Can数据报
SET_BIT(CAN_ARR[canNo-1]->sTxMailBox[transmit_mailbox].TIR, CAN_TI0R_TXRQ); //2024.6设置发送邮箱的传输标识符(TIR)中的发送请求位(TXRQ)
return 0;
}
else
{
return 1;
}
}
//=====================================================================
//函数名称:CAN_HWInit
//函数返回:0=正常,1=错误
//参数说明:CANChannel:硬件引脚组号,共有3组,分别为PTA11&PTA12(CAN_CHANNEL0),PTB8&PTB9(CAN_CHANNEL1),PTD0&PTD1(2)
//功能概要:CAN模块引脚初始化
//=====================================================================
uint8_t CAN_HWInit(uint8_t CANChannel)
{
if(CANChannel < 0 || CANChannel > 2)
{
return 1;
}
if(CANChannel == 0)
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN; //2024.6使用按位或运算符将RCC模块中的APB1外设时钟使能寄存器1的CAN1时钟使能位设置为逻辑高。这样可以启用CAN1模块的时钟,使其可以正常工作
RCC->AHB2ENR |= RCC_AHB2ENR_GPIOAEN;
GPIOA->MODER &= ~(GPIO_MODER_MODE11|GPIO_MODER_MODE12);
GPIOA->MODER |= (GPIO_MODER_MODE11_1|GPIO_MODER_MODE12_1); //2024.6清除GPIOA引脚11和引脚12的模式位,并将其设置为复用功能模式
GPIOA->AFR[1] &= ~(GPIO_AFRH_AFSEL11|GPIO_AFRH_AFSEL12);
GPIOA->AFR[1] |= (GPIO_AFRH_AFSEL11_0|GPIO_AFRH_AFSEL11_3)|(GPIO_AFRH_AFSEL12_0|GPIO_AFRH_AFSEL12_3); //2024.6清除GPIOA引脚11和引脚12的复用功能位,并将其设置为CAN功能的复用功能
}
else if(CANChannel == 1)
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN;
RCC->AHB2ENR |= RCC_AHB2ENR_GPIOBEN;
GPIOB->MODER &= ~(GPIO_MODER_MODE8|GPIO_MODER_MODE9);
GPIOB->MODER |= (GPIO_MODER_MODE8_1|GPIO_MODER_MODE9_1);
GPIOB->AFR[1] &= ~(GPIO_AFRH_AFSEL8|GPIO_AFRH_AFSEL9);
GPIOB->AFR[1] |= ((GPIO_AFRH_AFSEL8_0|GPIO_AFRH_AFSEL8_3)|
(GPIO_AFRH_AFSEL9_0|GPIO_AFRH_AFSEL9_3));
}
else
{
RCC->APB1ENR1 |= RCC_APB1ENR1_CAN1EN;
RCC->AHB2ENR |= RCC_AHB2ENR_GPIODEN;
GPIOD->MODER &= ~(GPIO_MODER_MODE0|GPIO_MODER_MODE1);
GPIOD->MODER |= (GPIO_MODER_MODE0_1|GPIO_MODER_MODE1_1);
GPIOD->AFR[0] &= ~(GPIO_AFRL_AFSEL0|GPIO_AFRL_AFSEL1);
GPIOD->AFR[0] |= ((GPIO_AFRL_AFSEL0_0 | GPIO_AFRL_AFSEL0_3)|
(GPIO_AFRL_AFSEL1_0 | GPIO_AFRL_AFSEL1_3));
}
return 0;
}
//=====================================================================
//函数名称:CAN_SWInit_Entry
//函数返回:0=正常,1=错误
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
//功能概要:进入初始化模式
//=====================================================================
uint8_t CAN_SWInit_Entry(uint8_t canNo)
{
int i;
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_SLEEP); //2024.6清除CAN控制器的睡眠位,使其进入工作模式
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_SLAK) != 0U) //2024.6检查CAN控制器是否成功退出睡眠模式
{
if(i++ > 0x30000)
{
return 1;
}
}
SET_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_INRQ); //2024.6设置CAN控制器进入初始化请求模式
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_INAK) == 0U)
{
if(i++ > 0x30000)
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称:CAN_SWInit_CTLMode
//函数返回:无
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
//功能概要:CAN总线模式设置
//=====================================================================
void CAN_SWInit_CTLMode(uint8_t canNo)
{
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_TTCM); //2024.6清除CAN控制器的时间触发通信模式位
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_ABOM); //2024.6清除CAN控制器的自动离线管理位
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_AWUM); //2024.6清除CAN控制器的自动唤醒模式位
SET_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_NART); //2024.6设置CAN控制器的非自动重传模式位
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_RFLM); //2024.6清除CAN控制器的接收FIFO锁定模式位
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_TXFP); //2024.6清除CAN控制器的发送FIFO优先级位
}
//函数名称:CAN_SWInit_CTLMode
//函数返回:无
//参数说明:canNo:模块基地址号,本芯片只有CAN_1,
// CANMode:CAN总线工作模式,分别为正常模式(CAN_MODE_NORMAL)、回环模式(CAN_MODE_LOOPBACK)、
// 静默模式(CAN_MODE_SILENT)以及回环与静默组合模式(CAN_MODE_SILENT_LOOPBACK)
//功能概要:CAN总线位时序配置
void CAN_SWInit_BT(uint8_t canNo, uint32_t CANMode, uint32_t Prescaler)
{
CAN_ARR[canNo-1]->BTR |= ((uint32_t)(Prescaler-1)|CAN_SJW_1TQ|CAN_BTR_TS1_1|CAN_BTR_TS1_0|CAN_BTR_TS2_2|CANMode); //2024.6设置CAN总线位时序配置寄存器的值
}
//=====================================================================
//函数名称:CAN_SWInit_Quit
//函数返回:0=正常,1=错误
//参数说明:canNo:模块基地址号
//功能概要:退出初始化模式,进入正常模式
//=====================================================================
uint8_t CAN_SWInit_Quit(uint8_t canNo)
{
int i;
CLEAR_BIT(CAN_ARR[canNo-1]->MCR, CAN_MCR_INRQ); //2024.6清除CAN控制器的初始化请求位,使其退出初始化模式
i = 0;
while ((CAN_ARR[canNo-1]->MSR & CAN_MSR_INAK) != 0U) //2024.6检查CAN控制器的初始化模式确认位是否为0,等待控制器进入正常模式
{
if (i++ > 0x30000)
{
return 1;
}
}
return 0;
}
//=====================================================================
//函数名称: CANFilterConfig
//函数返回:0=正常,1=错误
//参数说明: canNo:模块基地址号,
// canID:自身CAN节点的唯一标识,例如按照CANopen协议给出
// Can_Rx_FifoNo:中断使用的邮箱号,
// IsActivate:是否激活过滤器
// CANFilterBank:CAN总线过滤器组选择,共有28个,(CANFilterBank0~CANFilterBank27)
// CANFiltermode:CAN总线过滤器模式,分别为掩码模式(CAN_FILTERMODE_IDMASK)和列表模式(CAN_FILTERMODE_IDLIST)
// CAN_Filterscale:CAN总线过滤器位数,分别为32位(CAN_FILTERSCALE_32BIT)和16位(CAN_FILTERSCALE_16BIT)
//功能概要:CAN接收中断开启
//=====================================================================
uint8_t CANFilterConfig(uint8_t canNo, uint32_t CanID, uint32_t FilterBank, uint32_t Can_Rx_FifoNo, uint8_t IsActivate, uint32_t FilterMode, uint32_t FilterScale)
{
uint32_t FilterIdHigh, FilterIdLow, FilterMaskIdHigh, FilterMaskIdLow, filternbrbitpos;
if(CanID <= 0x7FFU) CanID = CanID << CAN_TI0R_STID_Pos; //2024.6将CanID左移CAN_TI0R_STID_Pos位,按位左移相当于乘以2的位数次幂,用于设置标识寄存器的标识符字段
FilterIdHigh = (CanID >> 16) & 0xFFFF; //2024.6获取CanID的高16位
FilterIdLow = (CanID & 0xFFFF); //2024.6获取CanID的低16位
FilterMaskIdHigh = 0xFFE0; //2024.6过滤器掩码的高16位,用于掩码模式
FilterMaskIdLow = 0x0000; //2024.6过滤器掩码的低16位,用于掩码模式
filternbrbitpos = (uint32_t)1 << (FilterBank & 0x1FU); //2024.6计算过滤器组的位位置,用于设置过滤器使能位的控制寄存器
//设置过滤器初始化模式 (FINIT=1),在此模式下可以进行过滤器初始化
SET_BIT(CAN_ARR[canNo-1]->FMR, CAN_FMR_FINIT); //2024.6设置过滤器的初始化模式
CLEAR_BIT(CAN_ARR[canNo-1]->FA1R, filternbrbitpos); //2024.6关闭指定过滤器组的过滤器
if (FilterScale == CAN_FILTERSCALE_16BIT)
{
CLEAR_BIT(CAN_ARR[canNo-1]->FS1R, filternbrbitpos);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR1 =
((0x0000FFFFU & (uint32_t)FilterMaskIdLow) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdLow);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR2 =
((0x0000FFFFU & (uint32_t)FilterMaskIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdHigh);
}
if (FilterScale == CAN_FILTERSCALE_32BIT) //2024.6检查过滤器的位数是否为32位
{
SET_BIT(CAN_ARR[canNo-1]->FS1R, filternbrbitpos); //2024.6设置过滤器模式寄存器中对应过滤器组的位,表示使用32位过滤器模式
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR1 = //2024.6 32位过滤器模式
((0x0000FFFFU & (uint32_t)FilterIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterIdLow);
CAN_ARR[canNo-1]->sFilterRegister[FilterBank].FR2 =
((0x0000FFFFU & (uint32_t)FilterMaskIdHigh) << 16U) |
(0x0000FFFFU & (uint32_t)FilterMaskIdLow);
}
if (FilterMode == CAN_FILTERMODE_IDMASK) //2024.6 检查过滤器的模式是否为ID掩码模式
{
CLEAR_BIT(CAN_ARR[canNo-1]->FM1R, filternbrbitpos); //2024.6掩码模式
}
else
{
SET_BIT(CAN_ARR[canNo-1]->FM1R, filternbrbitpos);
}
if (Can_Rx_FifoNo == CAN_FILTER_FIFO0) //2024.6检查CAN接收FIFO编号是否等于FIFO0
{
CLEAR_BIT(CAN_ARR[canNo-1]->FFA1R, filternbrbitpos); //2024.6邮箱号为0的邮箱
}
else
{
SET_BIT(CAN_ARR[canNo-1]->FFA1R, filternbrbitpos);
}
if (IsActivate == 1) //2024.6检查是否激活(Activate)的标志位是否为1
{
SET_BIT(CAN_ARR[canNo-1]->FA1R, filternbrbitpos); //2024.6激活过滤器
}
//退出过滤器初始化模式 (FINIT=0)
CLEAR_BIT(CAN_ARR[canNo-1]->FMR, CAN_FMR_FINIT); //2024.6清除过滤器模式寄存器中的过滤器初始化位(FINIT)
return 0;
}
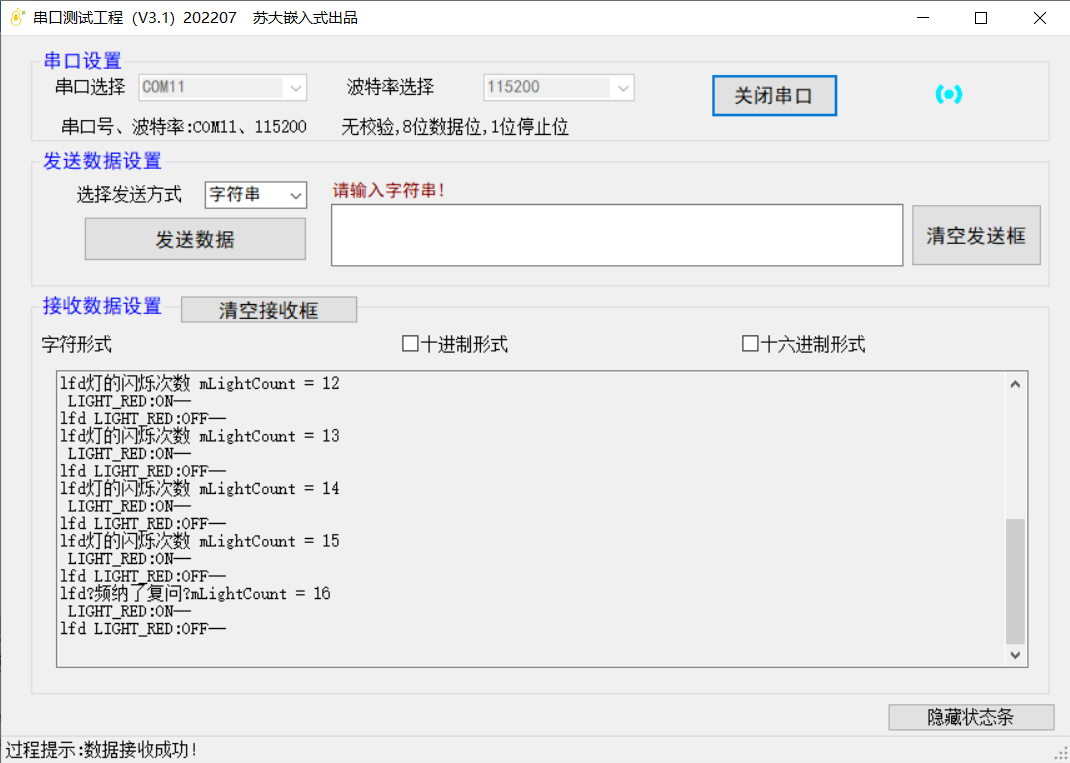
实验完成后,将结果截图、连线照片、实验原理图和CAN原理介绍,放入博客中。
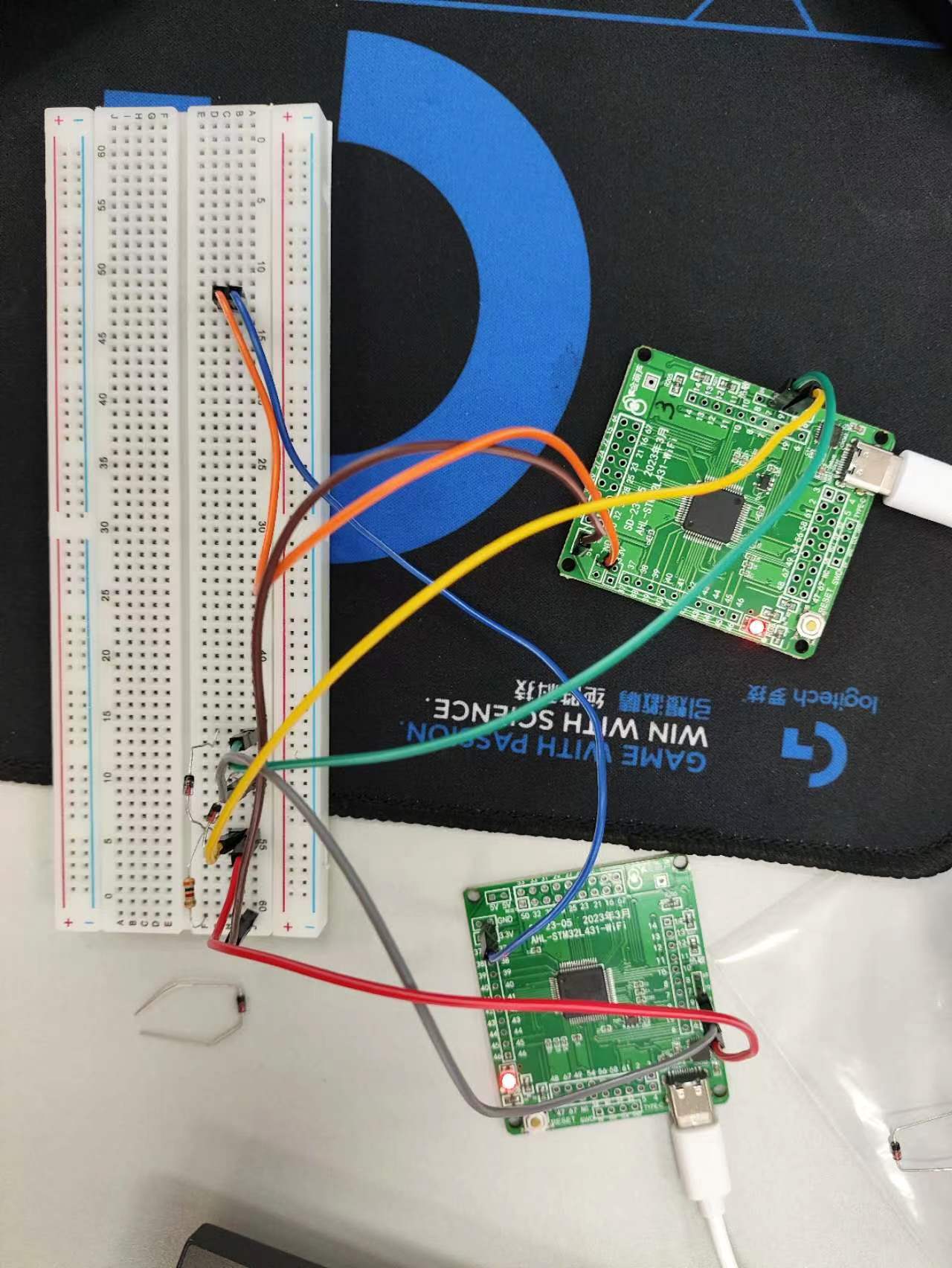
实验内容:2个或以上同学相互连接,利用CAN通信,向对方发送带有本人姓名的信息。连线方式:按基本原理性电路(不带收发器芯片)连接,参考教材图10-1。
nodeB接收nodeA
nodeA接收nodeB
连线图
实验原理图


can原理介绍
CAN控制器在嵌入式系统中通常是以硬件IP模块的形式存在的,其内部结构可以抽象为以下部分: 1、CAN内核(Core) 2、发送邮箱 3、接收FIFO 4、可配置过滤器组
CAN内核(Core):是控制器的核心,包含了一系列的控制和状态寄存器,通过配置这些寄存器可以设定CAN控制器的工作模式、波特率、错误检测和恢复策略等关键参数。内核还负责处理总线上的仲裁、错误检测、帧发送和接收等工作。
发送邮箱:具备3级发送邮箱功能,这意味着它可以同时准备并排队多个待发送的消息,每个邮箱对应一个单独的发送请求。
接收FIFO:配备2个具有3级深度的接收FIFO,用于暂存接收到的消息,按照先进先出的原则组织数据,并通过不同的过滤策略将接收到的消息分发给应用程序,有助于提高数据处理效率和减少数据丢失的风险。
可配置过滤器组:bxCAN通常提供多个过滤器组,允许用户根据需求配置多达28个不同的标识符过滤规则,这样可以根据不同的标识符范围或单个标识符来筛选出感兴趣的消息,减轻处理器负担并优化总线利用率。
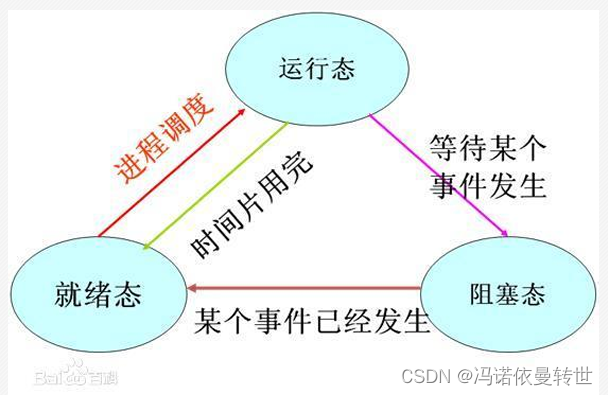
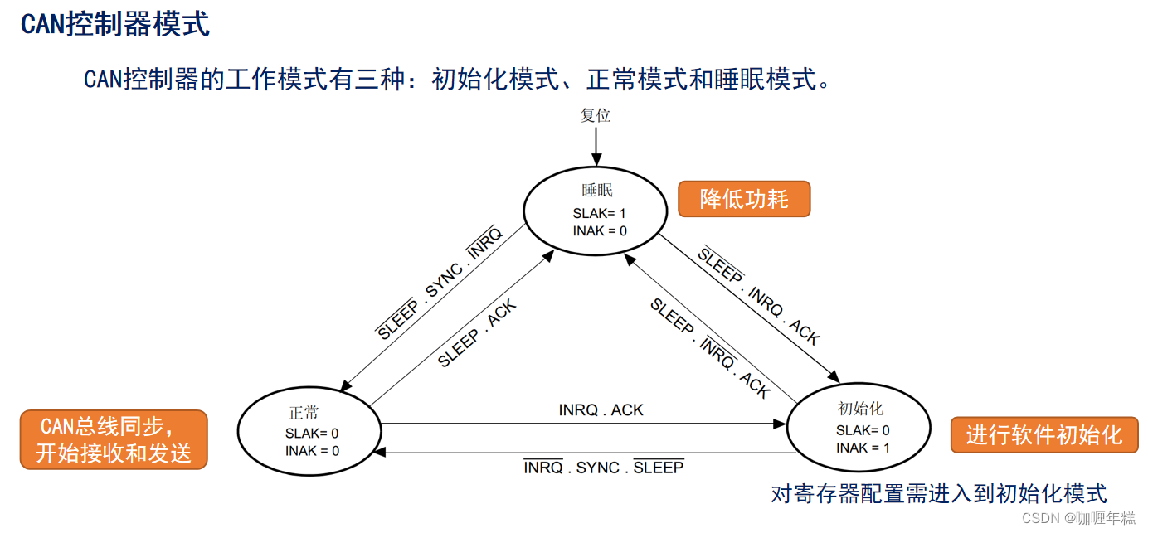
CAN控制器的模式分为工作模式和测试模式
工作模式包括以下三种基本模式: 初始化模式(Initialization Mode) 正常模式(Normal Mode) 睡眠模式(Sleep Mode)
测试模式包括以下三种基本模式: 静默模式(Silent Mode) 环回模式(Loopback Mode) 静默环回模式(Silent Loopback Mode)
CAN通信属于异步通信,没有时钟信号线,因此其可靠通信需借助统一的位时序进行,即位同步。 “帧”由“位”构成,一个位由 4 个“段”构成,每个段又由若干个 “Tq” 组成。 Tq 是 CAN 总线的最小时间单位。 1 个位的构成如下图所示:
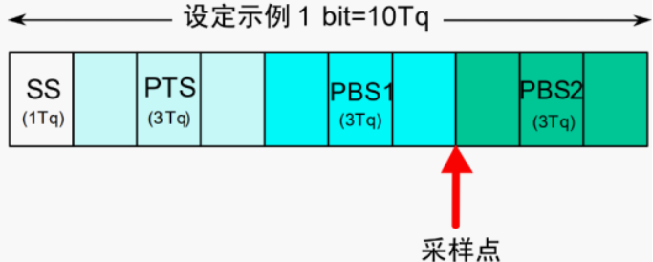
4个时序段,分别为: 同步段(SS) 传播时间段(PTS) 相位缓冲段1(PBS1) 相位缓冲段2(PBS2)
STM32为3个时序段(PTS和PBS1合并),分别为: 同步段(SS) 时间段1(BS1) 时间段2(BS2)
采样点在BS1和BS2之间
时钟同步
电平信号的传输存在时间延迟,各通讯节点的时钟频率也存在差异,需要时钟同步。
时钟同步机制分为硬同步、重同步两种,其目标均是使数据位的跳变沿位于一个位时序的同步段内。
硬同步:采用的同步方式是平移自身的位时序。硬同步仅发生在一帧报文的帧起始位处,对于该报文后续数据位的同步,则无能为力。
重同步:在一帧报文后续数据位的传输过程中不同步时,采用的方式是:当位时序超前时,延长时间段1(PBS1);当时序滞后时,缩短时间段2(PBS2)。

CAN构件接口函数
(1)初始化函数can_init:该函数种需要使用三个参数,有模块号canNo、标识符canID和位速率BitRate。 void can_init(uint8_t canNo, uint32_t canID, uint32_t BitRate)
(2)发送函数can_send:包含四个参数,分别为模块号canNo、目标标识符DestID、发送数据长度len和发送数据buff。 uint8_t can_send(uint8_t canNo, uint32_t DestID, uint16_t len ,uint8_t* buff)
(3)接收函数can_recv:包含三个参数,分别为模块号CanNo、接收数据存放的地址区首地址buff。 uint8_t can_recv(uint8_t canNo, uint8_t *buff)