背景
已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正
脚本
import numpy as np
import cv2
# 畸变校正
def undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist):
k0,k1,k2,k3=sym_dist
# k1, k2, p1, p2, k3 = sym_dist
p1,p2,p3=dec_dist
fx = focal_length_mm
fy = focal_length_mm
cx = xpoff_px
cy = ypoff_px
distCoeffs = np.array([k1, k2, p1, p2,k3])
cameraMatrix = np.array([[fx, 0, cx], [0, fy, cy], [0, 0, 1]])
distorted_points = np.array([[pixel_x, pixel_y]], dtype=np.float32)
undistorted_points = cv2.undistortPoints(distorted_points, cameraMatrix, distCoeffs)
#################################################### 4\对图像去畸变
img = cv2.imread('./images/100_0004_0001.JPG')
img_undistored = cv2.undistort(img, cameraMatrix, distCoeffs)
cv2.imwrite('./images/100_0004_00011.JPG', img_undistored)
return undistorted_points[0][0][0], undistorted_points[0][0][1]
# 相机坐标转世界坐标
def camera_to_world_coordinates(cam_coords, pos):
# 获取相机到世界的转换参数
pos_x, pos_y, pos_z, roll, pitch, yaw = pos
# 将角度转换为弧度
roll = np.radians(roll)
pitch = np.radians(pitch)
yaw = np.radians(yaw)
# 计算旋转矩阵
R_roll = np.array([
[1, 0, 0],
[0, np.cos(roll), -np.sin(roll)],
[0, np.sin(roll), np.cos(roll)]
])
R_pitch = np.array([
[np.cos(pitch), 0, np.sin(pitch)],
[0, 1, 0],
[-np.sin(pitch), 0, np.cos(pitch)]
])
R_yaw = np.array([
[np.cos(yaw), -np.sin(yaw), 0],
[np.sin(yaw), np.cos(yaw), 0],
[0, 0, 1]
])
R = R_yaw @ R_pitch @ R_roll
# 相机坐标转换到世界坐标
cam_coords_homogeneous = np.array([cam_coords[0], cam_coords[1], -H, 1])
world_coords = R @ cam_coords_homogeneous[:3] + np.array([pos_x, pos_y, pos_z])
return world_coords
if __name__ == "__main__":
####################################################基本参数
# 传感器宽度和高度(毫米)
sensor_width_mm = 12.83331744000000007588
sensor_height_mm = 8.55554496000000064271
# 图像宽度和高度(像素)
image_width_px = 5472
image_height_px = 3648
# 焦距(毫米)
focal_length_mm = 8.69244671863242679422
# 焦距(米)
focal_length_m = 8.69244671863242679422/1000
# 相对航高(米)
H=86.93
#像主点坐标 (像素)
xpoff_px=20.88973563438230485190
ypoff_px=50.51977022866981315019
#################################################### 1\计算空间分辨率
# 传感器尺寸转换为米
sensor_width_m = sensor_width_mm / 1000
sensor_height_m = sensor_height_mm / 1000
# 计算水平和垂直的 GSD
GSD_x = (sensor_width_m/image_width_px) * (H / focal_length_m )
GSD_y = (sensor_height_m /image_height_px) * (H / focal_length_m)
# 水平和垂直方向的 GSD
print("水平方向的 GSD:", GSD_x, "米/像素")
print("垂直方向的 GSD:", GSD_y, "米/像素")
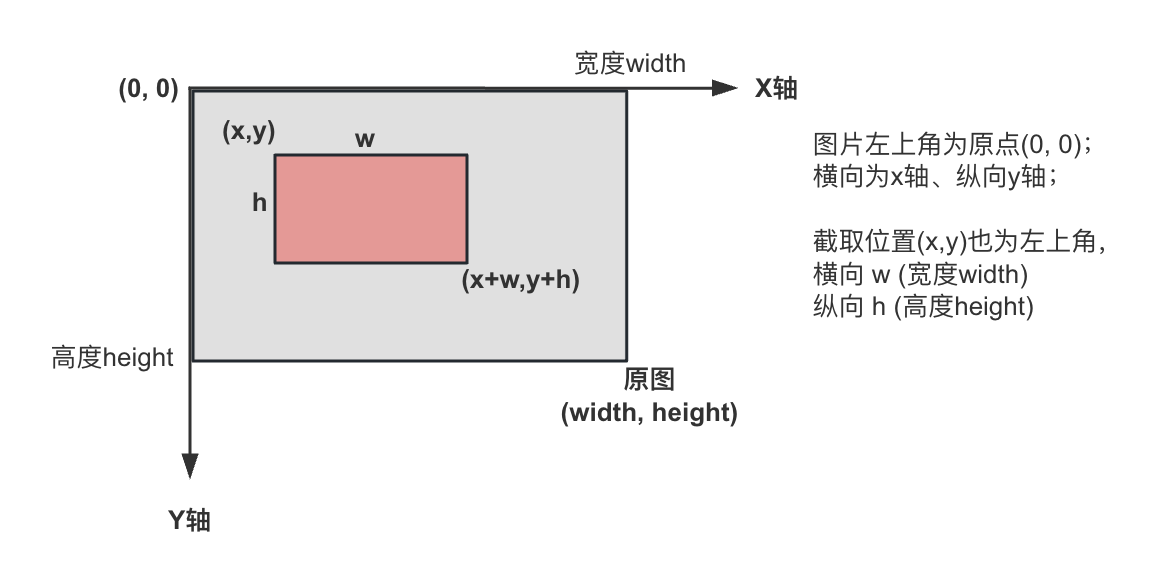
#################################################### 2\给定像素坐标,计算相机坐标
# 像素坐标
oripixel_x = image_width_px
oripixel_y = image_height_px
# oripixel_x = image_width_px/2
# oripixel_y = image_height_px/2
# oripixel_x = 0
# oripixel_y = 0
pixel_x=oripixel_x-xpoff_px-image_width_px/2
pixel_y=oripixel_y-ypoff_px-image_height_px/2
# 计算相机坐标(假设无畸变)
camera_x = pixel_x * GSD_x
camera_y = pixel_y * GSD_y
print("像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的相机坐标 (x, y): (", camera_x, "米, ", camera_y, "米)")
#################################################### 3\计算畸变后坐标
# 对称畸变系数
sym_dist = [0, -0.00043396118129128110, 0.00000262222711982075, -0.00000001047488706013]
# 径向畸变
dec_dist = [0.00000205885592671873, -0.00000321714140091248, 0]
# 进行畸变校正
undistorted_camera_x, undistorted_camera_y = undistort_pixel(pixel_x, pixel_y, sym_dist, dec_dist)
print("畸变校正后像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的相机坐标 (x, y): (", undistorted_camera_x, "米, ", undistorted_camera_y, "米)")
#################################################### 4\计算世界坐标
# POS数据
pos = [433452.054688, 2881728.519704, 183.789696, 0.648220, -0.226028, 14.490357]
# 计算世界坐标
world_coords = camera_to_world_coordinates((undistorted_camera_x, undistorted_camera_y), pos)
print("旋转平移变换后像素坐标 (", oripixel_x, ",", oripixel_y, ") 对应的世界坐标 (x, y): (", world_coords[0], "米, ", world_coords[1], "米)")

![[Qt学习笔记]Qt鼠标事件mouseMoveEvent<span style='color:red;'>实时</span>获取<span style='color:red;'>图像</span>的<span style='color:red;'>坐标</span>和<span style='color:red;'>像</span><span style='color:red;'>素</span>值](https://img-blog.csdnimg.cn/img_convert/46d409e97a8ea4ad68ad7cb738ba0f0a.gif)
![[OpenCV学习笔记]获取鼠标处<span style='color:red;'>图像</span>的<span style='color:red;'>坐标</span>和<span style='color:red;'>像</span><span style='color:red;'>素</span>值](https://img-blog.csdnimg.cn/img_convert/538512804500b8edfd1edc71f301e12e.webp?x-oss-process=image/format,png)