原理部分
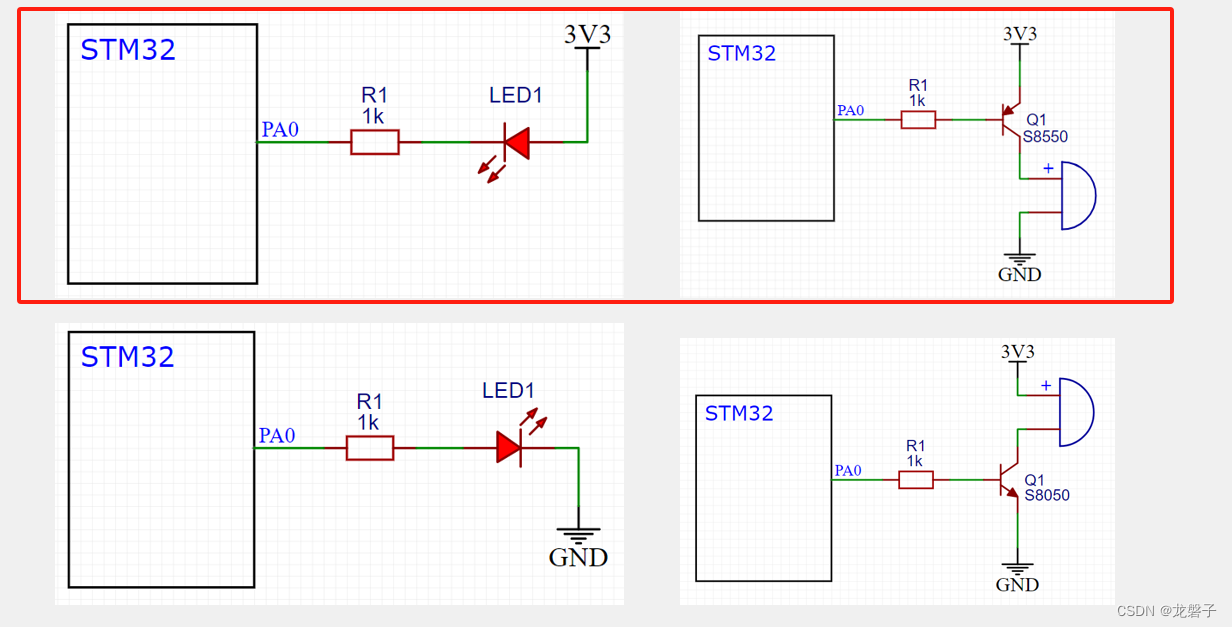
1.LED部分使用的是这样的连接方式
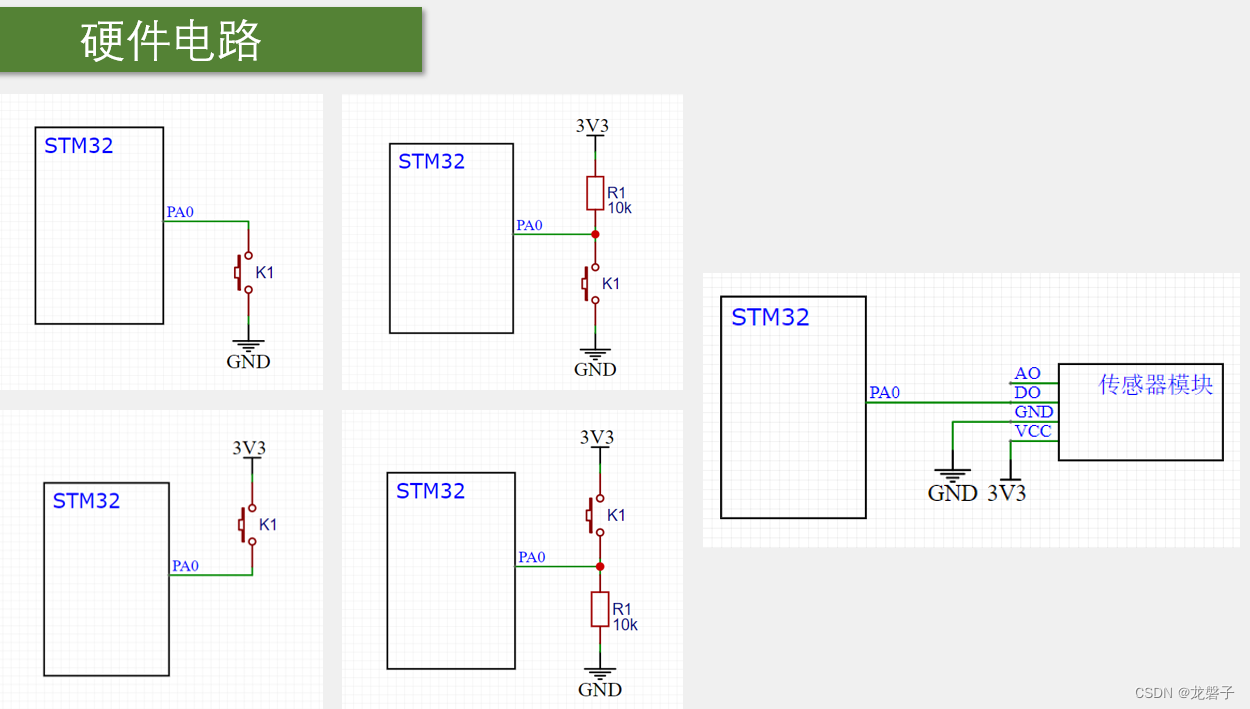
2.传感器模块的电路图
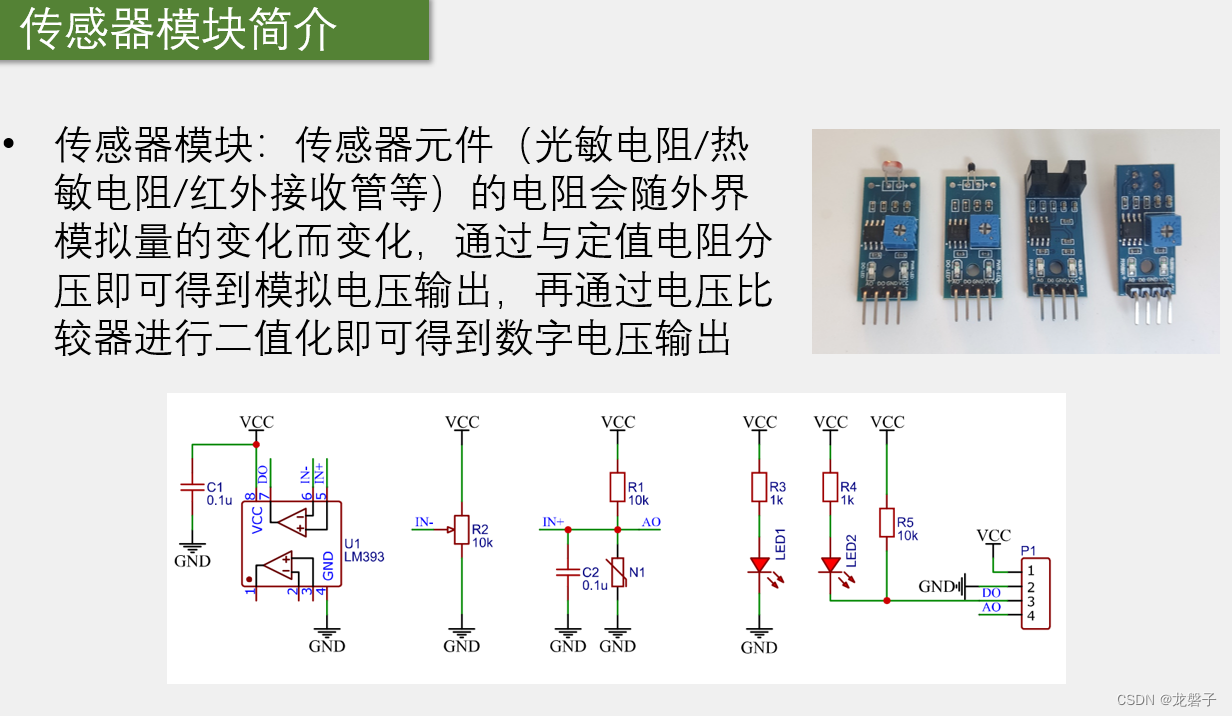
滤波电容如果接地,一般用于滤波,在分析电路时就不用考虑。下面这个电路就是看A端和B端哪端的拉力大,就能把电压值对应到相应的电压值
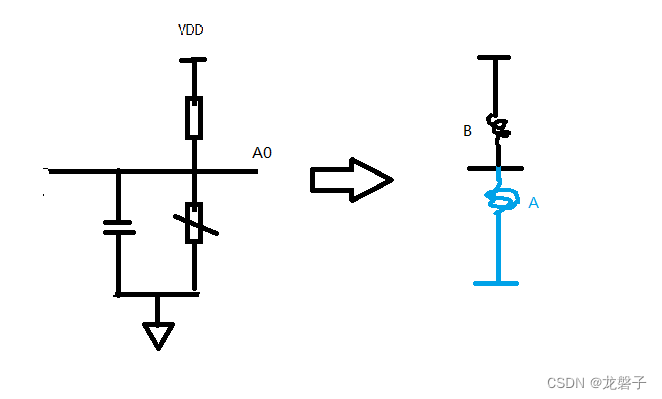
比较器部分
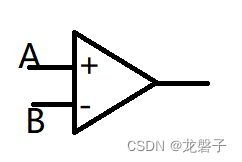
如果A端电压>B端电压,接VCC,反之接地
传感器需要上拉或下拉驱动,一般用下拉驱动
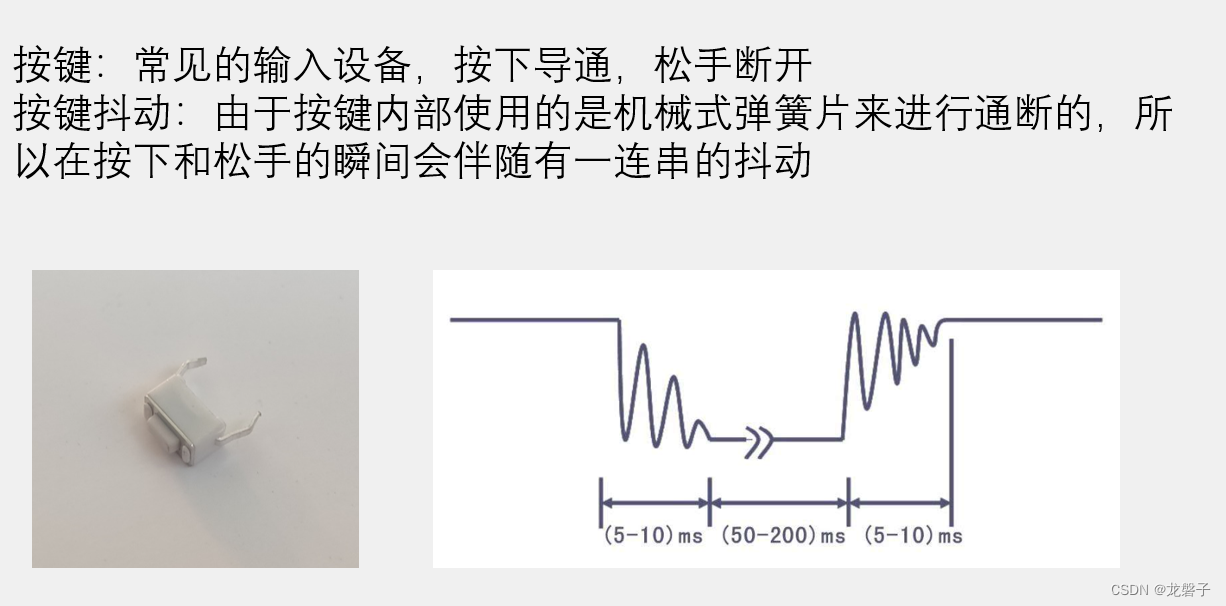
3.按键需要消除抖动
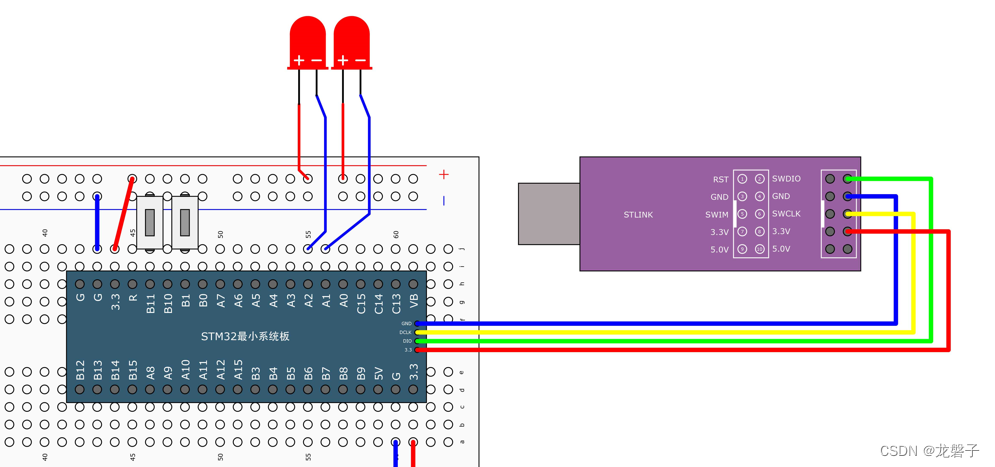
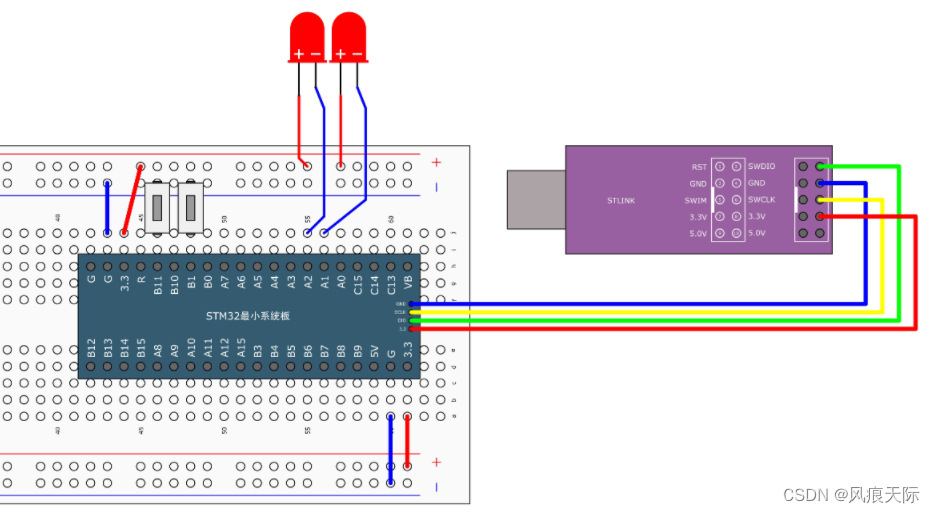
4.连接示意图
代码编写
1.思路
首先实现LED亮灭,随后实现按键1控制LED亮灭,最后实现2个按键各自控制两个ledd的亮灭
2.按照江科大老师给的电路连接接图进行连接
注意:
由于连接图中两个LED,一个连接的GPIO口为A1,一个连接的GPIO口为A2,所以需要分别定义
GPIO口默认为低电平
3.复制之前已经构建好的模板库
4.新建hardware文件夹并将路径联系到工程中,在hardware中新建led.c,led.h;key.c,‘key.h文件
5.led.h代码如下所示:
#ifndef _LED__H
#define _LED__H
void led_Init(void);
void led1_on(void);
void led1_off(void);
void led2_on(void);
void led2_off(void);
void turn_1(void);
void turn_2(void);
#endif
6.led.c代码如下所示:
#include "stm32f10x.h"
void led_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOB的时钟
//使用各个外设前必须开启时钟,否则对外设的操作无效
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_2; //GPIO引脚,赋值为第1,2号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOB的初始化
//LED默认为灭,SetBits是灭,ReSetBits是亮
GPIO_SetBits(GPIOA, GPIO_Pin_1|GPIO_Pin_2);
}
void led1_on(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
void led1_off(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
void led2_on(void)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2);
}
void led2_off(void)
{
GPIO_SetBits(GPIOA, GPIO_Pin_2);
}
void turn_1(void)
{
if(GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1)==0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_1);
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_1);
}
}
void turn_2(void)
{
if(GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2)==0) //获取输出寄存器的状态,如果当前引脚输出低电平
{
GPIO_SetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为高电平
}
else
{
GPIO_ResetBits(GPIOA, GPIO_Pin_2); //设置PA2引脚为高电平
}
}
7.key.h代码如下所示:
#ifndef _KEY__H
#define _KEY__H
void key_Init(void);
uint8_t key(void);
#endif
8.key.c代码如下所示:
#include "stm32f10x.h"
#include "Delay.h"
void key_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟
//使用各个外设前必须开启时钟,否则对外设的操作无效
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure; //定义结构体变量
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //GPIO模式,赋值为推挽输出模式
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1|GPIO_Pin_11; //GPIO引脚,赋值为第1,2号引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //GPIO速度,赋值为50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //将赋值后的构体变量传递给GPIO_Init函数
//函数内部会自动根据结构体的参数配置相应寄存器
//实现GPIOB的初始化
}
uint8_t key(void)
{
uint8_t keynum=0;
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1)==0)
{
Delay_ms(20);
while(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1)==0);
Delay_ms(20);
keynum=1;
}
if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11)==0)
{
Delay_ms(20);
while(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11)==0);
Delay_ms(20);
keynum=2;
}
return keynum;
}
9.main.c代码
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "led.h"
#include "key.h"
uint8_t keynum=0;
int main()
{
led_Init();
key_Init();
while (1)
{
keynum=key();
if(keynum==1)
{
turn_1();
}
if(keynum==2)
{
turn_2();
}
}
}




























![[职场] 项目助理需具备的能力素养有哪些? #笔记#知识分享#经验分享](https://img-blog.csdnimg.cn/img_convert/5b7ebfc0c78674ba005b02363dee2eaa.png)