上代码
import numpy as np
class KalmanFilter(object):
def __init__(self, F = None, B = None, H = None, Q = None, R = None, P = None, x0 = None):
if(F is None or H is None):
raise ValueError("Set proper system dynamics.")
self.n = F.shape[1]
self.m = H.shape[1]
self.F = F
self.H = H
self.B = 0 if B is None else B
self.Q = np.eye(self.n) if Q is None else Q
self.R = np.eye(self.n) if R is None else R
self.P = np.eye(self.n) if P is None else P
self.x = np.zeros((self.n, 1)) if x0 is None else x0
def predict(self, u = 0):
self.x = np.dot(self.F, self.x) + np.dot(self.B, u)
self.P = np.dot(np.dot(self.F, self.P), self.F.T) + self.Q
return self.x
def update(self, z):
y = z - np.dot(self.H, self.x)
S = self.R + np.dot(self.H, np.dot(self.P, self.H.T))
K = np.dot(np.dot(self.P, self.H.T), np.linalg.inv(S))
self.x = self.x + np.dot(K, y)
I = np.eye(self.n)
self.P = np.dot(np.dot(I - np.dot(K, self.H), self.P),
(I - np.dot(K, self.H)).T) + np.dot(np.dot(K, self.R), K.T)
def example():
dt = 1.0/60
F = np.array([[1, dt, 0], [0, 1, dt], [0, 0, 1]])
H = np.array([1, 0, 0]).reshape(1, 3)
Q = np.array([[0.05, 0.05, 0.0], [0.05, 0.05, 0.0], [0.0, 0.0, 0.0]])
R = np.array([0.5]).reshape(1, 1)
x = np.linspace(-10, 10, 100)
measurements = - (x**2 + 2*x - 2) + np.random.normal(0, 2, 100)
kf = KalmanFilter(F = F, H = H, Q = Q, R = R)
predictions = []
for z in measurements:
predictions.append(np.dot(H, kf.predict())[0])
kf.update(z)
import matplotlib.pyplot as plt
plt.plot(range(len(measurements)), measurements, label = 'Measurements')
plt.plot(range(len(predictions)), np.array(predictions), label = 'Kalman Filter Prediction')
plt.legend()
plt.show()
if __name__ == '__main__':
example()
说明
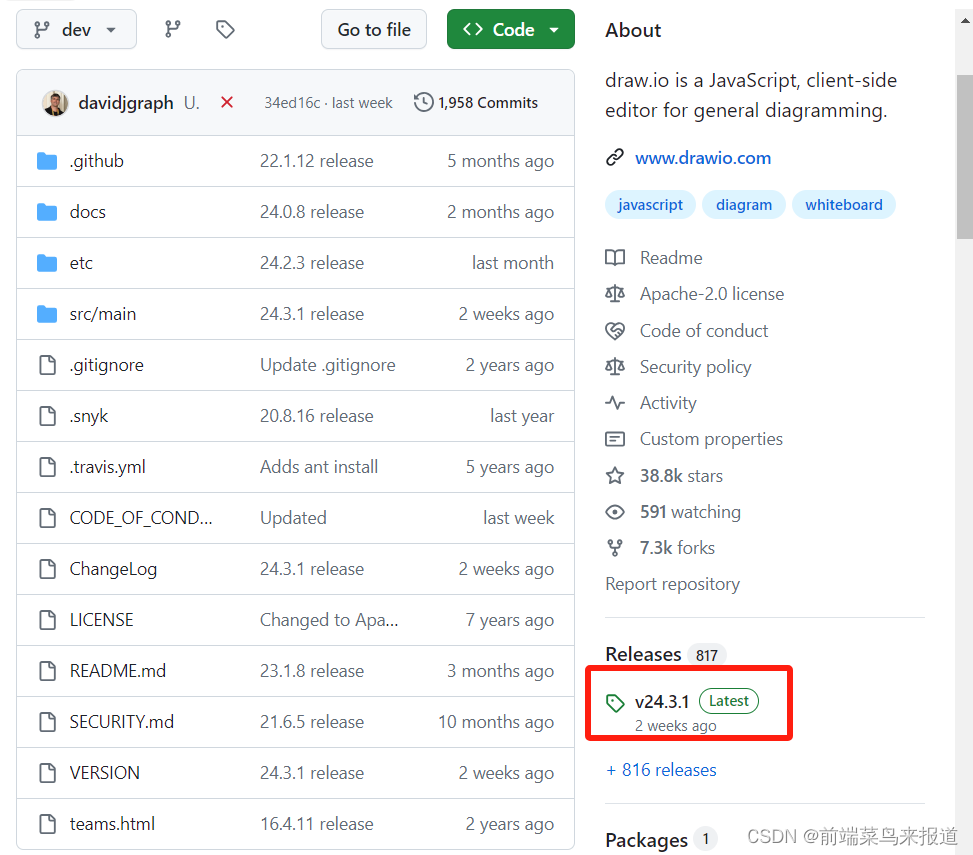
github上的。
参考
https://github.com/zziz/kalman-filter




![[足式机器人]Part2 Dr. CAN学习笔记- <span style='color:red;'>Kalman</span> Filter卡尔曼滤波器Ch05](https://img-blog.csdnimg.cn/direct/48f71c51fdab44808fa3731b752d78ee.png#pic_center)
![[足式机器人]Part2 Dr. CAN学习笔记- <span style='color:red;'>Kalman</span> Filter卡尔曼滤波器Ch05-3+4](https://img-blog.csdnimg.cn/direct/c942b79dfbce4e35967c1c59dd928e93.png#pic_center)