一、工具坐标偏移的使用场景
在机器人位置不改变的情况下,工业机器人使用默认工具坐标系示教的一系列运动点位,要保持原本点位位置不变的情况下,改变机器人工具坐标的参数,就要用到机器人坐标转化的功能。在FANUC机器人上体现为机器人的工具坐标偏移的功能。
二、设置工具偏移的参数
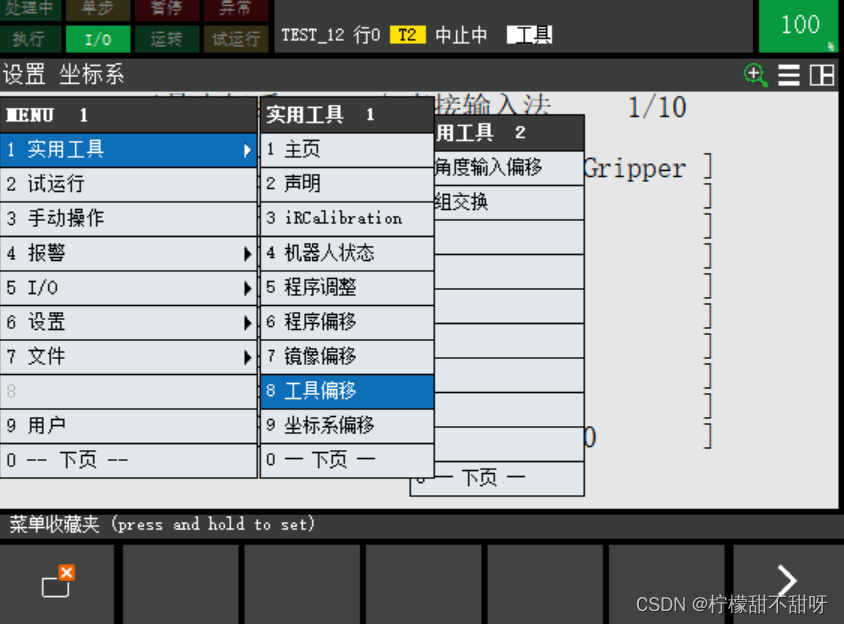
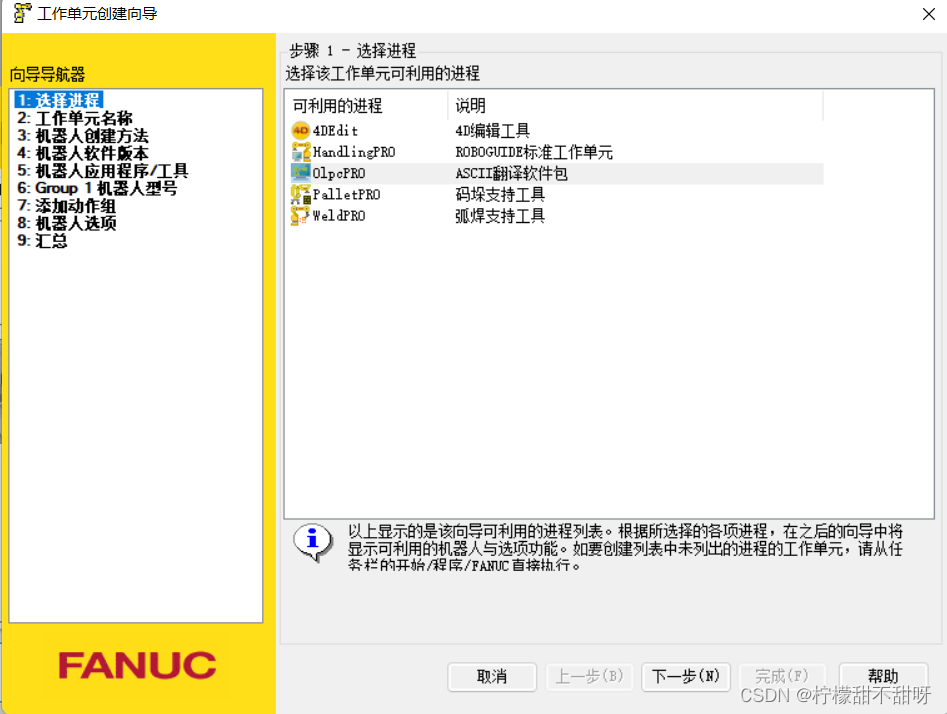
打开FANUC机器人的菜单栏,选择其中的工具偏移选项
选择需要做工具偏移的程序
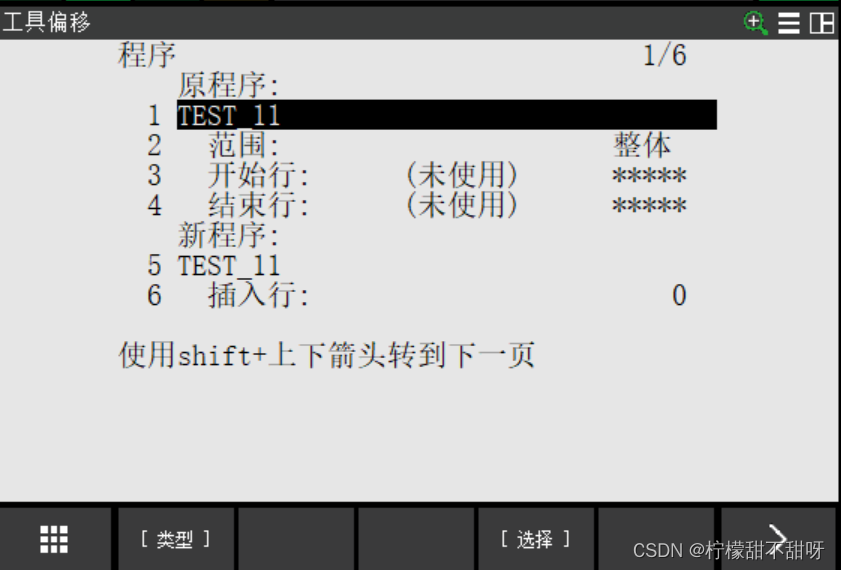
定义完成工具偏移后新的程序名

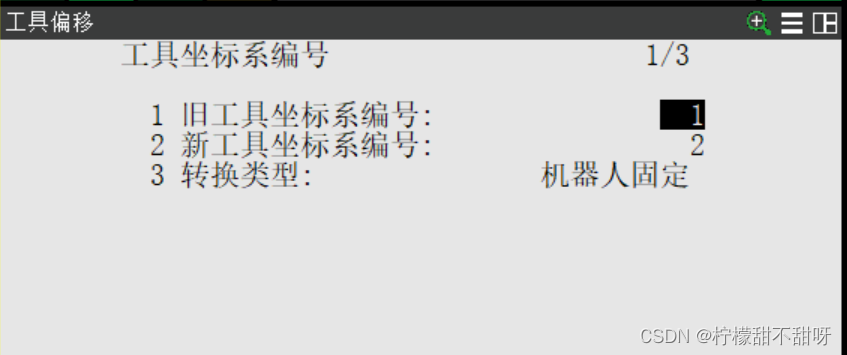
设置新旧坐标系的编号以及转换的类型,如果这边选择机器人固定的模式(保持当前的机器人路径切换为新的工具坐标系)
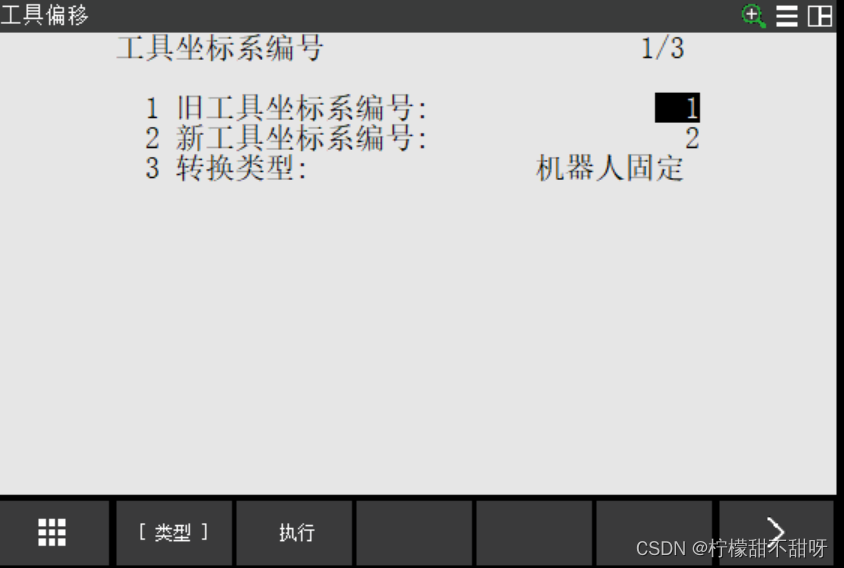
 设置完成后选择下方的执行选项
设置完成后选择下方的执行选项
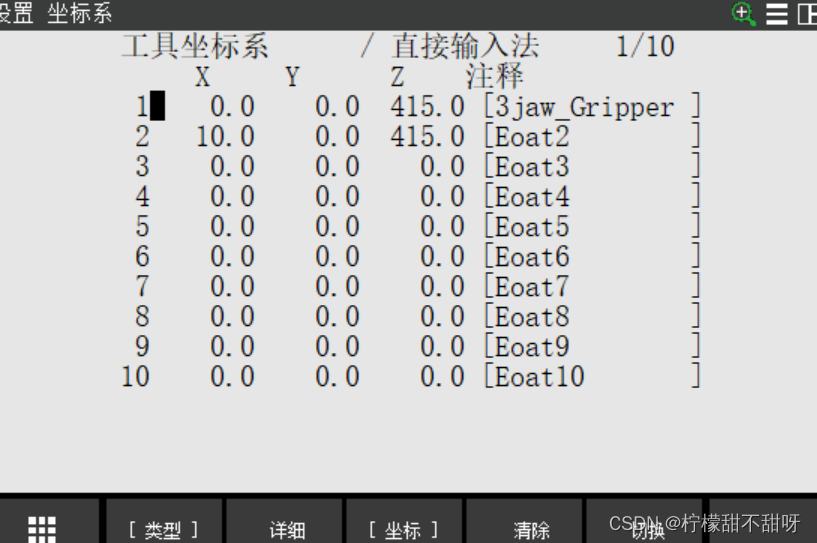
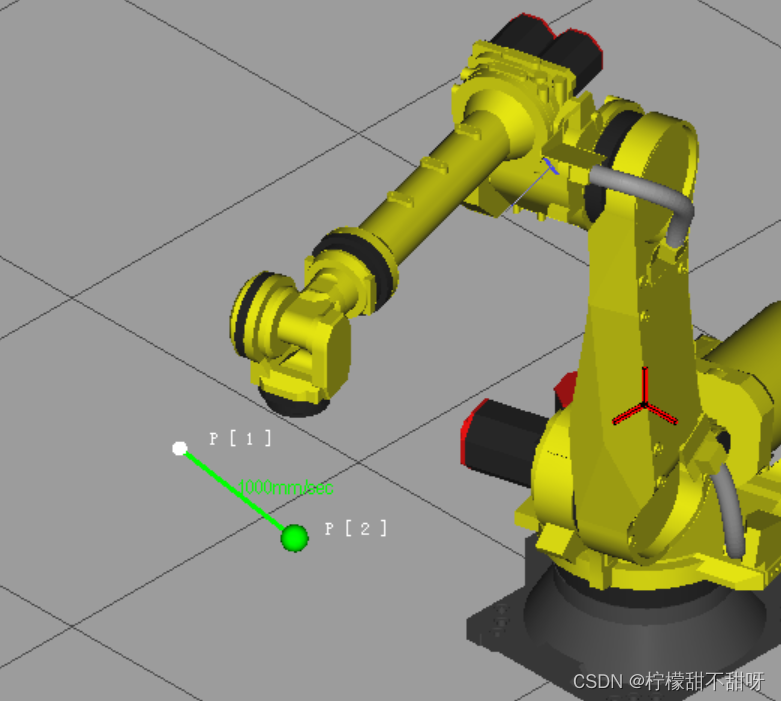
运行工具偏移后的TP程序查看当前程序的点位坐标

































![【uniapp】阿里云OSS上传 [视频上传]](https://img-blog.csdnimg.cn/direct/7013c4ee131442cea5e5f41cafb28d2f.png)